Измерение угловых перемещений
Для замера угловых перемещений применяют клинометры, в которых используются уровень или отвес (рис. 2). Клинометрами измеряются тангенсы углов поворота, но при малых углах тангенсы можно приравнять к величине углов в радианах. Допускаемая при этом погрешность не выходит за пределы точности измерений. Наибольшее применение получили клинометры Стоппани, Аистова и рычажные клинометры.
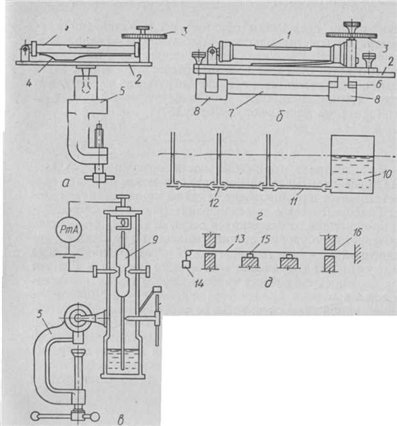
Рис. 2. Механические приборы для замера угловых перемещений: а, б — клинометры Стоппани; в — Аистова; г — прибор для гидростатического нивелирования;
д — устройство, использующее натянутую нить; 1 — уровень; 2 — станина; 3 — микрометрический винт; 4 — пружина; 5 — струбцина; 6 — опоры; 7 — измерительная база; 8 — муфты; 9 — отвес; 10 — сосуд для воды; 11 — шланги; 12 — трубки; 13 — нить; 14 — груз; 15 — замеряемые точки; 16 — отверстие в стене
Клинометр Стоппани основан на применении высокочувствительного уровня 1, который одним концом шарнирно закреплен на станине 2 и поджат снизу пружиной 4 к микрометрическому винту 3, ось которого перпендикулярна оси уровня. Микрометрический винт снабжен диском (лимбом) с 360 делениями. Цена каждого деления 1". Станина с уровнем может быть снабжена струбциной 5 для крепления клинометра (см. рис. 2, а). Имеются модификации клинометра Стоппани: переносной клинометр, устанавливаемый опорами 6 на измерительную базу 7 с отшлифованными муфтами 8 (рис. 2б), и клинометр, устанавливаемый на любую поверхность.
|
|
|
После установки клинометра и приведения пузырька уровня в нульпункт производят первый отсчет по лимбу, затем, после поворота конструкции, пузырек снова приводят в нульпункт и производят второй отсчет. Наклон измерительной платформы к горизонту высчитывают как разность двух отсчетов по лимбу.
В клинометре Аистова (рис. 2в) использован отвес 9, который отклоняется при измерении угла наклона корпуса клинометра. Степень отклонения фиксируется микрометрическим винтом, на котором имеется диск с делениями и указателем для взятия отсчетов. Работают с
клинометром следующим образом: после установки клинометра на конструкцию в вертикальном положении вращением винта замыкают электрическую сеть до появления сигнала и отмечают при этом отсчет с1 на диске, затем винтом размыкают цепь. После нагружения конструкции вновь винтом замыкают цепь и берут новый отсчет с2. Угол поворота вычисляют по формуле:
Электрические методы измерения угловых перемещений.
Кольцевой и спиральный потенциометры дают на выходе изменение сопротивления при вращении оси подвижного контакта, скользящего по треку резистора. Кольцевые потенциометры имеют трек длиной не более одного оборота, т.е. не более, чем угловое перемещение на 360° и точность ± 1 %. Спиральные потенциометры часто имеют многооборотный трек и могут обеспечить точность до ± 0,002 %.
|
|
|
Синусно-косинусный вращающийся трансформатор имеет две статорные обмотки, развернутые под прямым углом друг к другу и ротор. Для трансформатора с выходным сигналом переменной амплитуды статор питается однофазным синусоидальным напряжением с частотой  , поэтому амплитуды в обмотках статора сдвинуты на 90°. Выходной сигнал будет иметь ту же частоту, что и входной, но его амплитуда будет определяться другим углом. Возможное разрешение метода составляет около 0,4°.
, поэтому амплитуды в обмотках статора сдвинуты на 90°. Выходной сигнал будет иметь ту же частоту, что и входной, но его амплитуда будет определяться другим углом. Возможное разрешение метода составляет около 0,4°.
Сельсин отличается от синус-косинусного трансформатора тем, что имеет три статорные обмотки, расположенные под углом 120° вокруг ротора. Синусоидальное напряжение здесь подается на ротор, и э.д.с., наводимая в каждой статорной катушке, зависит от ее ориентации относительно положения ротора. Амплитуда напряжения каждого статора является мерой углового положения ротора. Сельсины используются для измерения углового перемещения. Но наиболее типичным является их использование в паре друг с другом для передачи информации об угловом перемещении на расстояние.
|
|
|
Датчики положения оси.
Дискретные датчики положения оси дают выходной сигнал в цифровом коде, который соответствует угловому положению оси относительно начальной позиции. Разрешение определяется числом «окошек», которое может быть выполнено на вращающемся диске. Типичное значение этих чисел меняется в пределах 60…1000, и при этом разрешение получается равным 6…0,3°, а иногда даже лучше.
Цифровые датчики положения осиизмеряют абсолютное положение оси в пределах одного оборота. Обычно они имеют 1 или 12 треков. Десятитрековый датчик дает 1024 отсчета на оборот и имеет разрешение 0,4°.Двенадцатитрековый датчик соответственно дает 4096 отсчетов на оборот, и его разрешение составляет 0,1°.
Дата добавления: 2018-04-05; просмотров: 1063; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!