По характеру управляющих воздействий
В зависимости от прохождения и характера сигнала в системе автоматического управления они делятся также на непрерывные и дискретные (прерывистые).
Управление называют непрерывным, если контроллер непрерывно изменяет управляющее воздействие в зависимости от изменения задающего воздействия и управляемой величины.
Управление называют дискретным, если контроллер вырабатывает управляющее воздействие, принимающее одно из нескольких возможных значений. Для дискретных (прерывистых) систем характерно, что в них через дискретные промежутки времени происходит размыкание или замыкание цепи воздействия.
Системы дискретного (прерывистого) управления подразделяются на импульсные или релейные.
В импульсных системах размыкание цепи воздействий выполняется принудительно и периодически специальным прерывающим устройством. Импульсные системы содержат импульсные элементы, способные преобразовать непрерывное изменение входной величины в дискретную импульсную выходную величину.
В релейных системах размыкание или замыкание цепи воздействий выполняется одним из элементов системы при непрерывном значении входного воздействия. Релейные системы содержат реле или элементы, имеющие релейную характеристику, которая принимает два значения: минимально и максимально возможное.
По виду зависимости установившейся ошибки от внешнего воздействия
|
|
|
Ранее было введено понятие ошибки регулирования:

Для установившегося состояния системы уравнение принимает вид:

По виду зависимости установившейся ошибки  от внешнего воздействия системы делят на статические и астатические.
от внешнего воздействия системы делят на статические и астатические.
Систему называют статической по отношению к внешнему воздействию, если при воздействии, стремящемся со временем к некоторому установившемуся значению, ошибка тоже стремится к постоянному значению, зависящему от величины внешнего воздействия. При наличии возмущающих воздействий статические системы не могут точно стабилизировать управляемый параметр.
Систему называют астатической по отношению к внешнему воздействию, если при воздействии, стремящемся со временем к некоторому установившемуся значению, ошибка стремится к нулю независимо от величины внешнего воздействия.
Одна и та же система автоматического управления может быть статической по отношению к возмущающему воздействию и астатической по отношению к задающему воздействию. Системы автоматической стабилизации, где задающее воздействие сохраняет постоянное значение, обычно бывают астатическими по отношению к возмущающему воздействию, а следящие системы — по отношению к управляющему воздействию.
|
|
|
По энергетическим признакам
Такие системы регулирования, в которых первичный измерительный преобразователь (чувствительный элемент) воздействует непосредственно на изменение положения РО (регулирующего органа), называют системами прямого управления (регулирования), а регуляторы — регуляторами прямого действия. В регуляторах прямого действия энергия для перемещения РО поступает непосредственно из объекта управления через первичный измерительный преобразователь (чувствительный элемент).
Примечание
Реакция РО на первичный измерительный преобразователь в системах прямого регулирования снижает чувствительность этого элемента и, как следствие, ухудшается качество регулирования.
В системах непрямого (косвенного) управления для перемещения РО применяются вспомогательные устройства, работающие от посторонних (внешних) источников энергии.
По математическому описанию
При анализе и расчете систем управления необходима ее математическая модель, определяющая изменение переменных состояния системы с течением времени.
Практически все системы управления ХТП не линейны, и их точное математическое описание представляет собой значительные трудности. Собственно, и не всегда нужно стремиться к точному математическому описанию системы, если это не определено практическими задачами.
|
|
|
САУ делят на линейные и нелинейные в зависимости от того, какие в основе математической модели лежат уравнения (линейные или нелинейные). Далее линейные и нелинейные системы могут быть непрерывными, дискретными, дискретно-непрерывными.
Непрерывные системы описываются дифференциальными уравнениями; дискретные описываются дифференциально-разностными; дискретно-непрерывные — обоими видами уравнений. В свою очередь, каждый из названных трех классов подразделяется на подклассы:
• стационарные системы с сосредоточенными параметрами;
• стационарные системы с сосредоточенными параметрами и распределенными параметрами;
• нестационарные системы с сосредоточенными параметрами;
• нестационарные системы с сосредоточенными параметрами и распределенными параметрами.
Системы (их математические модели) могут также разделены на детерминированные и стохастические.
Если воздействия, приложенные к системе, и параметры модели являются постоянными или детерминированными функциями переменных состояния и времени, математическую модель системы называют детерминированной.
|
|
|
Если воздействия, приложенные к системе, и параметры модели являются случайными функциями или случайными величинами, математическую модель системы называют стохастической.
ФУНКЦИОНАЛЬНАЯ СТРУКТУРА САР
Функциональная структурная схема системы автоматического регулирования с одной регулируемой величиной  представлена на рис. 14.
представлена на рис. 14.
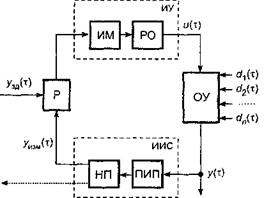
Рис. 14.Функциональная схема САР:
ОУ — объект управления; ПИП — первичный измерительный преобразователь; НП — нормирующий преобразователь; ИИС — информационно-измерительная система; Р — регулятор; ИУ — исполнительное устройство; ИМ — исполнительный механизм; РО — регулирующий орган
Система состоит из объекта управления (ОУ) и управляющего устройства, к которому можно отнести измерительное устройство (или информационно-измерительную систему, ИИС), автоматический регулятор и исполнительное устройство. В химической технологии ОУ может быть, например, реактор, в котором управляющее устройство должно поддерживать заданный технологический режим.
Рассмотрим подробно функциональные элементы, входящие в управляющее устройство.
Первичный измерительный преобразователь (ПИП — чувствительный элемент, сенсор) предназначен для преобразования регулируемого параметра в сигнал измерительной информации в форме, удобной для обработки и дальнейших преобразований. Например, термоэлектрический преобразователь, представляющий собой спай двух разнородных проводников, преобразует температуру в термоэлектродвижущую силу (ТЭДС).
Нормирующий преобразователь (НП) служит для взаимного согласования входящих в систему управления элементов и дистанционной передачи сигналов по каналам связи. Он осуществляет преобразование сигнала, полученного от ПИП, в эквивалентный ему унифицированный сигнал. Возможно преобразование сигнала одной физической природы в унифицированный сигнал той же самой физической природы (например, преобразование ТЭДС в унифицированный токовый сигнал от 0 мА до 5 мА) или в унифицированный сигнал другой физической природы (например, преобразование ТЭДС в унифицированный пневматический сигнал от 20 кПа до 100 кПа). Полученный унифицированный сигнал соответствует текущему значению регулируемого параметра и может передаваться не только к регулятору, но и к вторичному измерительному прибору или на системы более высокого уровня иерархии.
ПИП и НП являются элементами информационно-измерительной системы (ИИС).
Сигнал, соответствующий заданному значению регулируемого параметра  формируется задающим устройством (на рис. 14 не изображено). Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
формируется задающим устройством (на рис. 14 не изображено). Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
Примечание
В некоторых случаях задающее устройство конструктивно объединено с регулятором.
Регулятор (Р) с помощью элемента сравнения определяет отклонение текущего значения регулируемого параметра от заданного значения и формирует командный сигнал в соответствии с заложенным в нем алгоритмом регулирования. Сигнал, формируемый регулятором, по мощности не всегда достаточен, чтобы управлять ИУ, поэтому регулятор часто снабжается усилителем мощности.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от регулятора командным сигналом, называется исполнительным устройством (ИУ). Как правило, в нем можно выделить два функциональных элемента: регулирующий орган и исполнительный механизм.
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган (РО).
Примечание
Исполнительный механизм, перемещающий затвор регулирующего органа, часто называют исполнительным двигателем, или серводвигателем (сервомеханизмом).
Регулирующий орган (РО) — техническое средство изменения материального или энергетического потока, влияющего на регулируемую величину в ОУ. Это устройство, непосредственно воздействующее на ОУ для поддержания заданного значения регулируемой величины или изменения ее по заданному закону.
При исследовании динамических свойств системы регулирования по каналу задающего воздействия (вход — задающее воздействие , выход — регулируемая величина , возмущающее воздействие отсутствует или является постоянной величиной), систему автоматического управления удобно изображать упрощенной структурной схемой, представленной на рис. 15.
При исследовании динамических свойств системы регулирования по каналу возмущающего воздействия (вход — возмущающее воздействие  , выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
, выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
Для повышения устойчивости и улучшения динамических свойств системы управления в нее вводят корректирующие устройства (на рис. 14 не показаны). В зависимости от способов подключения корректирующие устройства делятся на последовательные и параллельные. С помощью последовательных корректирующих устройств происходит преобразование сигнала ошибки, и в управляющее воздействие вводятся составляющие, пропорциональные производной и интегралу от ошибки по времени. Параллельные корректирующие устройства (местные дополнительные обратные связи) подают сигнал с выхода элемента на вход одного из предыдущих. Функции корректирующих устройств могут выполнять компьютеры.

Рис.15. Структурная схема САР по каналу задающего воздействия

Рис. 16.Структурная схема САР по каналу возмущающего воздействия
Дата добавления: 2018-04-04; просмотров: 314; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!