Лабораторная работа № 1. Последовательное соединение звеньев
Цель работы
Изучить свойства типовых динамических звеньев и системы, состоящей из последовательного соединения звеньев первого порядка. Научиться, по виду ЛАЧХ оценивать характер переходных процессов при ступенчатом входном воздействии.
Задание к работе

| |
| |
Таблица 1
| Вариант | 
| 
| 
| 
| 
| 
| 
| 
| 
|
| 1-1 1-2 1-3 | 1 1 1 | 1 1 1 | 0.5 4 4 | 1 1 0 | 1 1 1 | 0.156 0.156 0.156 | 0.1 0.1 0.1 | 0.176 0.176 0.176 | 0.2 0.2 0.2 |
| 2-1 2-2 2-3 | 1 1 1 | 1 1 1 | 0.5 4 4 | 1 1 0 | 1 1 1 | 0.208 0.208 0.208 | 0.1 0.1 0.1 | 0.264 0.264 0.264 | 0.2 0.2 0.2 |
| 3-1 3-2 3-3 | 1 1 1 | 1 1 1 | 0.5 4 4 | 1 1 0 | 1 1 1 | 0.412 0.412 0.412 | 0.2 0.2 0.2 | 0.088 0.088 0.088 | 0.44 0.44 0.44 |
| 4-1 4-2 4-3 | 1 1 1 | 1 1 1 | 0.5 2 2 | 1 1 0 | 1 1 1 | 0.208 0.208 0.208 | 0.1 0.1 0.1 | 0.176 0.176 0.176 | 0.44 0.44 0.44 |
Программа самостоятельной работы
1. По заданным параметрам своего варианта (табл. 1) рассчитать и построить аппроксимированные и точные логарифмические амплитудные (ЛАЧХ) и фазовые (ЛФЧХ) частотные характеристики каскадов звеньев:
1; 1-2; 1-2-5-3.
2. По заданным вариантам остальных двух членов бригады построить аппроксимированные ЛАЧХ каскада 1-2-5-3.
3. Построить приближенные переходные функции и определить основные показатели переходного процесса при ступенчатом входном воздействии в указанных каскадах звеньев (1; 1-2; 1-2-5-3) для своего варианта и в каскаде 1-2-5-3 для остальных вариантов своей бригады.
|
|
|
4. Результаты расчёта свести в таблицы и графики.
Программа работ в лаборатории
1. Собрать исследуемую систему в рабочем поле компьютера в соответствии с заданной структурной схемой (рис. 1).
2. С помощью компьютера снять кривые переходных процессов на выходах 1,2 и 3 звеньев системы при подаче на вход звена 1 единичного ступенчатого воздействия.
3. Определить основные показатели переходных процессов (установившееся  и максимальное
и максимальное  отклонения, перерегулирование s, время переходного процесса
отклонения, перерегулирование s, время переходного процесса  ), занести в таблицы и сопоставить их с расчётными значениями.
), занести в таблицы и сопоставить их с расчётными значениями.
Методические указания к работе № 1
При последовательном соединении n звеньев с передаточными функциями  , АЧХ, ЛАЧХ и ЛФЧХ – соответственно
, АЧХ, ЛАЧХ и ЛФЧХ – соответственно  , результирующие
, результирующие  равны
равны
 . (1.1)
. (1.1)
В исследуемой САУ звенья 1, 2, 3 являются апериодическими (или инерционными). Апериодическое звено описывается во времени дифференциальным неоднородным уравнением 1-го порядка
 . (1.2)
. (1.2)
Его передаточная функция и частотные характеристики имеют вид
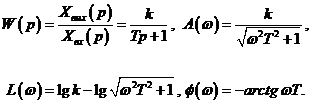 (1.3)
(1.3)
При k =1,  зависят лишь от значений
зависят лишь от значений  , что позволяет строить их однообразно. Значения
, что позволяет строить их однообразно. Значения  (ЛАЧХ при w=0, т. е. lgw=-¥) равны lg k, например, при k=1 равны нулю, при k >1 лежат выше оси абсцисс, а при k <1 – ниже оси абсцисс. Данные расчета ЛАЧХ при k= 1 и ЛФЧХ по формулам (1.3) приведены в таблице (рис. 2), причем если построение вести в масштабах, рекомендованных в п. 1.2.3, то шаг по оси абсцисс lgw равен 1 см. Значения lg
(ЛАЧХ при w=0, т. е. lgw=-¥) равны lg k, например, при k=1 равны нулю, при k >1 лежат выше оси абсцисс, а при k <1 – ниже оси абсцисс. Данные расчета ЛАЧХ при k= 1 и ЛФЧХ по формулам (1.3) приведены в таблице (рис. 2), причем если построение вести в масштабах, рекомендованных в п. 1.2.3, то шаг по оси абсцисс lgw равен 1 см. Значения lg  =lgwТ равны нулю при собственной частоте
=lgwТ равны нулю при собственной частоте  (частоте сопряжения участков аппроксимированной ЛАЧХ), отрицательны – при
(частоте сопряжения участков аппроксимированной ЛАЧХ), отрицательны – при  и положительны – при
и положительны – при  .
.
|
|
|
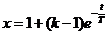
На рис. 2 приведены уточнённые ЛАЧХ(  ) и ЛФЧХ (
) и ЛФЧХ (  ) звеньев 1 и 2 при Т1=0,1с (
) звеньев 1 и 2 при Т1=0,1с (  ), k1=2, Т2=0,25 с, k1·Т2=0,5 с, (
), k1=2, Т2=0,25 с, k1·Т2=0,5 с, (  ), рассчитанные по формулам (1.1). Там же приведены ЛАЧХ, аппроксимированные отрезками прямых линий.
), рассчитанные по формулам (1.1). Там же приведены ЛАЧХ, аппроксимированные отрезками прямых линий.
Для ускорения процесса построения ЛЧХ апериодических звеньев рекомендуется вырезать из картона шаблоны L и j (заштриховано на рис.2). При этом уточнённые ЛЧХ апериодического звена строятся в следующем порядке:
1) находится частота сопряжения  ;
;
2) вычерчивается аппроксимированная ЛАЧХ в виде отрезка прямой с нулевым наклоном, проведенной по координате lgk до частоты сопряжения  , и отрезка с наклоном – 1 лог на декаду (
, и отрезка с наклоном – 1 лог на декаду (  на рис. 2) и частотах больших lg
на рис. 2) и частотах больших lg  ;
;
3) накладывается шаблон, как указано на рис. 2, и вычерчиваются уточненные ЛАЧХ и ЛФЧХ.
Переходная функция апериодического звена, т. е. изменение  при ступенчатом единичном воздействии на входе
при ступенчатом единичном воздействии на входе  , может быть найдена решением уравнения (1.2):
, может быть найдена решением уравнения (1.2):
|
|
|
 . (1.4)
. (1.4)
На рис. 2 представлена таблица  , рассчитанная по формуле (1.4), и кривые переходных функций
, рассчитанная по формуле (1.4), и кривые переходных функций  и
и  для звеньев 1 и 2 с указанными выше значениями параметров. Там же приведена расчётная переходная функция
для звеньев 1 и 2 с указанными выше значениями параметров. Там же приведена расчётная переходная функция  для САУ, состоящей из двух апериодических звеньев 1 и 2, соединённых последовательно. С достаточной степенью точности её можно представить в виде экспоненты
для САУ, состоящей из двух апериодических звеньев 1 и 2, соединённых последовательно. С достаточной степенью точности её можно представить в виде экспоненты  с большой постоянной (в данном примере
с большой постоянной (в данном примере  ), запаздывающей на малую постоянную (
), запаздывающей на малую постоянную (  ).
).
Звено 5 при  , являющееся форсирующим звеном первого порядка с коэффициентом форсировки
, являющееся форсирующим звеном первого порядка с коэффициентом форсировки  и постоянной времени
и постоянной времени  , может быть представлено в виде последовательного соединения двух звеньев:
, может быть представлено в виде последовательного соединения двух звеньев:
– апериодического 
 ;
;
– обратного апериодического (пропорционально-дифференцирующего) 
 ,
,
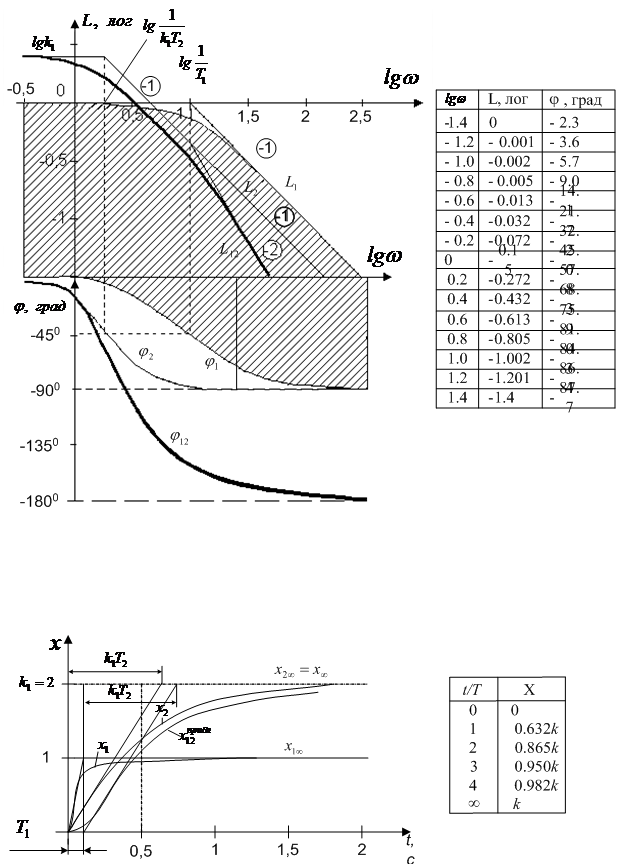
Рис. 2. ЛЧХ и переходные функции апериодических звеньев
с частотами сопряжения, соответственно,  и
и  . ЛАЧХ и ЛФЧХ
. ЛАЧХ и ЛФЧХ  и
и  являющиеся зеркальным отображением относительно оси абсцисс прямого апериодического звена с постоянной времени
являющиеся зеркальным отображением относительно оси абсцисс прямого апериодического звена с постоянной времени  , могут быть также построены с помощью шаблона. На рис. 3 представлены ЛЧХ составных частей
, могут быть также построены с помощью шаблона. На рис. 3 представлены ЛЧХ составных частей  ,
,  и
и  ,
,  , а также ЛЧХ звена 5 в целом
, а также ЛЧХ звена 5 в целом  ,
,  при k3>1;
при k3>1;  ,
,  – при k3<1. Переходная функция звена 5 в этом случае описывается уравнением
– при k3<1. Переходная функция звена 5 в этом случае описывается уравнением
|
|
|
 , (1.5)
, (1.5)
(она представлена на рис. 3 в виде кривой x51 для случая k3=4).
При k4=0, k5=1 звено 5 является реальным дифференцирующим звеном первого порядка, т. е. вместо пропорционально-дифференцирующего звена будет идеально-дифференцирующее звено  . Переходная функция звена 5 в целом описывается в этом случае уравнением
. Переходная функция звена 5 в целом описывается в этом случае уравнением
 , где , (1.6)
, где , (1.6)
(ЛЧХ(  ), переходная функция
), переходная функция  и таблица расчета представлены на рис. 3).
и таблица расчета представлены на рис. 3).
При  звено 5 является пропорционально-интегрирующим звеном, ЛЧХ которого (при k3=0,5<1) представлено кривыми L54, φ54 на рис. 3.
звено 5 является пропорционально-интегрирующим звеном, ЛЧХ которого (при k3=0,5<1) представлено кривыми L54, φ54 на рис. 3.
Переходная функция форсирующего звена может быть найдена по выражению
 .
.
На рис. 3 приведены
1) ЛАЧХ L1, ЛФЧХ  и переходная функция для форсирующего звена с параметрами k3 = 2 (k = 4), T4 = 0,2 c (T= 0,1 c);
и переходная функция для форсирующего звена с параметрами k3 = 2 (k = 4), T4 = 0,2 c (T= 0,1 c);
2) ЛАЧХ L2, ЛЧФХ  и переходная функция для форсирующего звена с параметрами k3 = 0,5 (k= 0,25), T4 = 0,2 с ( T= 0,4 с);
и переходная функция для форсирующего звена с параметрами k3 = 0,5 (k= 0,25), T4 = 0,2 с ( T= 0,4 с);
3) при k4 = 0, k5 = 1 звено 5 является реальным дифференцирующим звеном 1-го порядка с коэффициентом форсировки и постоянной времени . Переходная функция этого звена может быть найдена по выражению
 .
.
На рис. 3 приведены ЛАЧХ L3, ЛФЧХ  , кривая и таблица с данными переходной функции
, кривая и таблица с данными переходной функции  реального дифференцирующего звена с параметрами k3 = 2 (k = 4), T4 = 0,2 с (T= 0,1 c);
реального дифференцирующего звена с параметрами k3 = 2 (k = 4), T4 = 0,2 с (T= 0,1 c);
4) при k4 = 1, k5 = 0 звено 5 является пропорционально-интегрирующим звеном с коэффициентом усиления пропорциональной составляющей и постоянной интегрирования . Его ЛАЧХ (при k3=0,5<1) представлена кривыми  ,
,  на рис. 3. Переходная функция может быть найдена по выражению
на рис. 3. Переходная функция может быть найдена по выражению
 .
.
На рис. 3 приведены ЛАЧХ L4, ЛФЧХ j4 и переходная функция  пропорционально-интегрирующего звена с параметрами k3 = 0,5 (k = 0,25), Т4 = 0,2 с (Т = 0,4 с).
пропорционально-интегрирующего звена с параметрами k3 = 0,5 (k = 0,25), Т4 = 0,2 с (Т = 0,4 с).
Во всех рассмотренных случаях наблюдается однозначная зависимость между формой ЛАЧХ и ЛФЧХ звеньев. Такие звенья и САУ, состоящая из этих звеньев, называются минимально-фазовыми.
При сопоставлении ЛАЧХ и соответствующих им переходных функций можно убедиться в следующем:
1) установившееся значение выходной величины определяется ординатой ЛАЧХ L(0) при нулевой частоте, т. е.  = 10L(0);
= 10L(0);
2) начальное значение выходной величины определяется ординатой ЛАЧХ при w = ¥, т. е.  = 10L(¥);
= 10L(¥);
3) переходный процесс протекает без перерегулирования, если ординаты ЛАХ на всех частотах не превышают ординаты ЛАХ при нулевой частоте;
4) максимум в ЛАХ свидетельствует о том, что переходный процесс протекает с перерегулированием. Максимальное отклонение выходной величины приблизительно равно входному сигналу, умноженному на максимальное значение коэффициента усиления амплитуды АЧХ (km=10Lm);;
5) переходный процесс до достижения максимума протекает приблизительно по экспоненте, сдвинутой на время постоянного запаздывания. Экспонента имеет постоянную времени, которая определяется изменением наклона ЛАХ с нулевого (0) на единичный отрицательный (–1). Время постоянного запаздывания равно сумме постоянных времени, определяющих дальнейшее увеличение отрицательного наклона ЛАХ в области высоких частот;
6) переходный процесс после достижения максимума идёт приблизительно по экспоненте с постоянной времени, которая определяется изменением наклона аппроксимированной ЛАХ с единичного положительного (+1) на нулевой (0).
Построив  отдельных звеньев, результирующие
отдельных звеньев, результирующие  при последовательном соединении в соответствии с формулой (1.1) получаются путём сложения ординат
при последовательном соединении в соответствии с формулой (1.1) получаются путём сложения ординат  при постоянной абсциссе
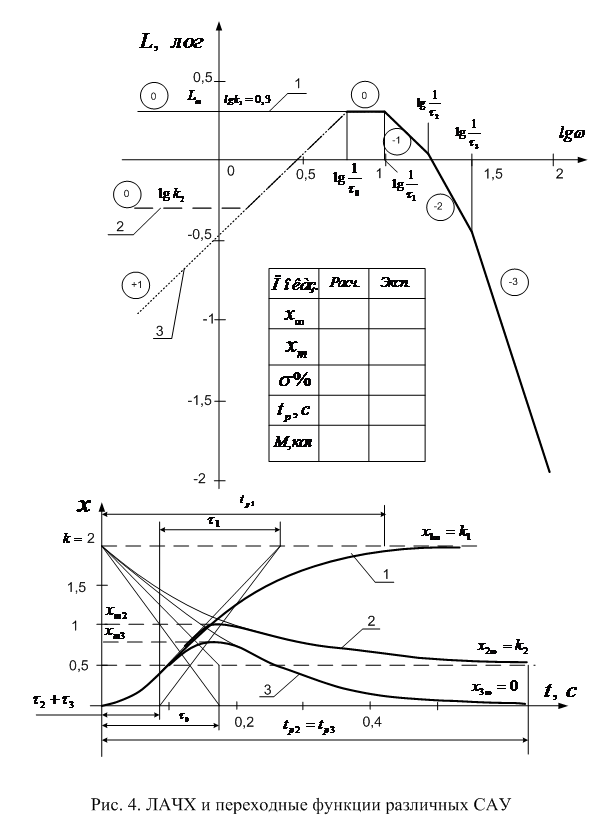
при постоянной абсциссе  . Варианты параметров в пределах одной бригады подобраны так, чтобы охватить основные виды результирующих ЛАЧХ САУ (рис. 4).
. Варианты параметров в пределах одной бригады подобраны так, чтобы охватить основные виды результирующих ЛАЧХ САУ (рис. 4).
Определение показателей регулирования по результирующей ЛАЧХ минимально-фазовой САУ основано на построении приближённой кривой переходного процесса. При этом можно рекомендовать следующую методику:
1) построить аппроксимированную отрезками прямых с наклонами 1, 0, –1, –2, –3, … лог/дек результирующую ЛАЧХ системы. При этом будут получены аппроксимированные ЛАЧХ типа 1, 2, 3 (рис. 4);
2) определить частоты точек сопряжения отрезков с +1 и 0 наклоном  , с 0 и –1 наклонами
, с 0 и –1 наклонами  , с –1 и –2 наклоном
, с –1 и –2 наклоном  и т.д.;
и т.д.;
3) определить значения амплитуд, соответствующих максимальным и установившимся значениям ЛАЧХ  ;
;
4) на оси времени кривой переходного процесса (рис. 5) отложить отрезок, соответствующий  , а из полученной точки на прямую k1 отложить подкасательную τ1 и соответствующей кривой нарастания x экспоненту;
, а из полученной точки на прямую k1 отложить подкасательную τ1 и соответствующей кривой нарастания x экспоненту;
5) для ЛАЧХ типа 1 кривая переходного процесса 1 может быть получена путём плавного перехода из начала координат на полученную экспоненту;
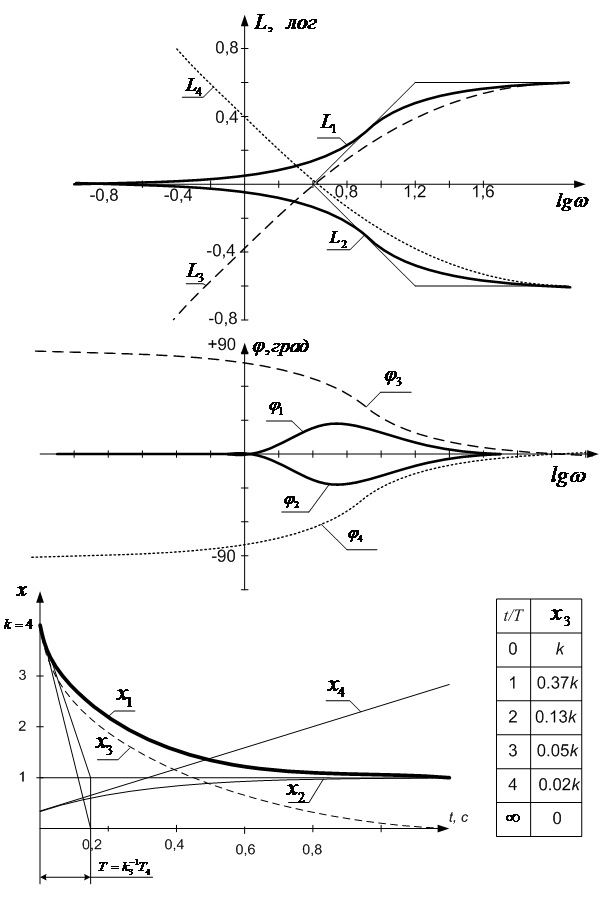 Рис. 3. ЛЧХ и переходные функции звена 5
Рис. 3. ЛЧХ и переходные функции звена 5
6) для ЛАЧХ типа 2 и 3 необходимо построить экспоненту с подкасательной  , соответствующую спадающему участку кривой переходного процесса. Результирующая кривая 2, 3 переходного процесса может быть получена путём плавного перехода с нарастающего участка на экспоненту, соответствующую спадающему участку кривой переходного процесса до установившегося значения (k2 , 0).
, соответствующую спадающему участку кривой переходного процесса. Результирующая кривая 2, 3 переходного процесса может быть получена путём плавного перехода с нарастающего участка на экспоненту, соответствующую спадающему участку кривой переходного процесса до установившегося значения (k2 , 0).
Определение основных показателей регулирования:
1) время регулирования – это время достижения установившегося значения с заданной точностью D (для силовых САУ обычно D = 0,05 или 0,02);
2) максимальное значение ;
3) перерегулирование  ;
;
4) колебательность  , округлённое до целого,
, округлённое до целого,
где ТK – период колебаний.
Последний показатель колебательности M определяется для замкнутых САУ или при наличии колебательных звеньев, т. е. в лабораторной работе № 1 M = 0.
При = 0 перерегулирование смысла не имеет и поэтому не определяется.
Данные расчёта показателей регулирования заносятся в таблицу (рис. 4).
Вопросы для самоконтроля
1. Напишите передаточные функции, вычертите ЛАЧХ и переходные функции каждого динамического звена, используемого в работе.
2. Приведите выражения передаточной функции, ЛАЧХ и ФЧХ при последовательном соединении звеньев.
3. Каким значениям переходной функции соответствует L(ω= 0), L(ω = ¥)?
4. О чём свидетельствует наличие всплеска в ЛАЧХ?
Литература
[1, c. 72–108, 125–141, 181–237];
[3, c. 51–88, 165–270];
[4, c. 45–74].
Дата добавления: 2018-04-04; просмотров: 1173; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!