Передаточные функции разомкнутых импульсных систем
Nbsp;
Билет № 13
1. Дифференциальные уравнения аналоговых замкнутых систем САУ.
Система автоматического управления представляет собой совокупность объекта управления, регулятора и датчика рассогласования. Обобщенная функциональная схема системы управления представлена на рис.4.1.
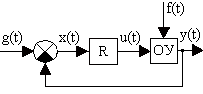
Рис. 4.1. Функциональная схема системы управления
Для того, чтобы получить математическое описание системы управления, необходимо составить по рассмотренной ранее методике линеаризованные уравнения всех элементов, из которых состоит датчик рассогласования, регулятор и объект управления. Таким образом получим систему дифференциальных уравнений, описывающую исследуемую систему управления. Полученная система дифференциальных уравнений путем исключения промежуточных переменных может быть разрешена относительно любой координаты системы управления. Обычно она решается либо относительно рассогласования x(t), т.е. ошибки, либо относительно управляемой величины y(t).
Первый случай встречается чаще, так как исследование изменения ошибки, как правило, является более важным. В этом случае получается дифференциальное уравнение
D(p)x(t) = Q(p)g(t) + N(p)f(t). (4.1)
Полином D(p) степени n от символа дифференцирования p характеризует свободное движение системы. Он называется характеристическимполиномоми может быть представлен в виде
 , (4.2)
, (4.2)
|
|
|
При решении системы дифференциальных уравнений относительно управляемой величины получается уравнение движения объекта управления при наличии регулятора. Это уравнение получается в результате подстановки выражения для ошибки x(t)=g(t)-y(t) в уравнение (4.1):
D(p)y(t) = R(p)g(t) - N(p)f(t), (4.3)
где
R(p) = D(p) - Q(p).
Полином R(p) определяет влияние задающего воздействия g(t) на управляемую величину.
Уравнения (4.1) и (4.3) являются исходными дифференциальными уравнениями замкнутой системы управления
Пример. Определить передаточные функции системы, структурная схема которой имеет вид, представленный на рис. 4.5.

Рис. 4.5. Структурная схема системы управления
Решение:Запишем передаточную функцию разомкнутой системы:
 ,
,
тогда передаточные функции замкнутой системы будут:
 ;
;  .
.
Переходные процессы в импульсных системах.
Переходный процесс в импульсных системах определяется с помощью обратного z-преобразования, ряда Лорана, решения разностного уравнения, частотных методов, основанных на использовании вещественной или мнимой частотных характеристик замкнутой системы [9, 15, 17, 18].
Для расчета дискрет переходного процесса можно найти обратное z-преобразование изображения выходной величины системы y[n,s] = Zs-1{Y(z,s)}. При этом следует воспользоваться формулой обращения (1.41), которая устанавливает, что дискретные значения переходного процесса
|
|
|
 (1.101)
(1.101)
где zi - полюсы выражения Y(z,s); i = 1, 2, ..., k.
Вычет в простом полюсе определяется по формуле

а в полюсе кратности r

Дискретные значения переходного процесса могут быть найдены также путем разложения изображения выходной величины Y(z,s) в ряд Лорана по степеням z-1
Y(z,s) = Y0 + Y1 z-1+ Y2 z-2+ Y3 z-3+ ... . (1.102)
Коэффициенты этого ряда определяют значения выходной величины замкнутой импульсной системы в дискретные моменты времени t = (n+s)T. Так как изображение Y(z,s) представляет собой отношение двух полиномов, то коэффициенты ряда Y0, Y1, Y2, ... могут быть получены делением полинома числителя на полином знаменателя. При малых периодах дискретности ряд сходится медленно и объем вычислительной работы значителен.
Пример. Определить переходный процесс при единичном ступенчатом входном воздействии на выходе импульсной системы, передаточная функция которой имеет следующий вид:
 .
.
Р е ш е н и е. Z-изображение входного воздействия G(z)=z/(z-1).
|
|
|
Следовательно, Y(z) = Ф(z)G(z) =

= 0.64z-1+1.25z-2+1.42z-3+1.34z-4+1.2z-5+1.11z-6+1.08z-7+... .
Полученные коэффициенты сведены в табл. 1.3, на основании которой на рис. 1.17 построена кривая переходного процесса.
Т а б л и ц а 1. 3
Переходный процесс
| Время t=nT | Выходная величина y[nT] |
| 0 1T 2T 3T 4T 5T 6T 7T и т.д. | 0 0.64 1.25 1.42 1.34 1.20 1.11 1.08 ... |

Рис. 1.17. График переходного процесса
Переходный процесс в импульсной системе может быть получен в результате решения разностного уравнения системы относительно дискретных значений входной g[nT] и выходной y[nT] координаты. Разностное уравнение определяется на основании дискретной передаточной функции замкнутой импульсной системы Ф(z) и имеет следующий вид (1.42)
a0y[n]+a1y[n-1]+...+amy[n-m]=b0g[n]+b1g[n-1]+...+blg[n-l], (1.103)
при m ³l и y[n] º 0, f[n] º 0 для всех n < 0.
Решение его представляет собой рекуррентную формулу:
 ; n=0, 1, 2, ... (1.104)
; n=0, 1, 2, ... (1.104)
для нулевых начальных условий y[n] º 0 и g[n] º 0 при n < 0.
Формула (1.104) используется и для расчета переходных процессов в непрерывных системах после дискретизации их дифференциальных уравнений.
КОНТРОЛЬНОЕ ЗАДАНИЕ № 13
|
|
|
по ТАУ
1. Определить с помощью критерия Рауса устойчивость системы, уравнение свободного движения которой имеет вид:
(0,001р4+0,05р3+0,4р2+р+100)у=0
2. Ответ: система неустойчива.
Билет 14
Передаточные функции разомкнутых импульсных систем
Разомкнутая линейная амплитудная импульсная система (АИС) может быть схематически представлена в виде последовательного соединения импульсного элемента (ИЭ) и непрерывной части (НЧ) (рис. 1.6). Подобные системы называют импульсными фильтрами.

Рис. 1.6. Функциональная схема разомкнутой импульсной системы:
ИЭ - импульсный элемент; НЧ - непрерывная часть
Импульсный элемент преобразует задающее воздействие g(t) в последовательность импульсов x*, амплитуда которых пропорциональна входному непрерывному сигналу. Импульсная последовательность после прохождения через непрерывную часть вследствие сглаживающих свойств последней превращается в непрерывную величину на выходе y(t).
При исследовании импульсной системы ее структуру приводят к расчетной схеме (рис. 1.7) путем замены импульсного элемента последовательным соединением простейшего импульсного элемента (ПИЭ) и непрерывного фильтра, который называется формирующим элементом (ФЭ). Простейший импульсный элемент преобразует непрерывный сигнал в мгновенные импульсы в виде d-функций, модулированные по площади, а формирующий элемент формирует импульс заданной формы из d-функций, соответствующей форме выходного импульса реального импульсного элемента. Форма импульса реального импульсного элемента определяет импульсную функцию формирующего элемента wФЭ(t). Следовательно, передаточная функция формирующего элемента может быть определена как изображение формы импульса по Лапласу, т.е.
WФЭ(s)=L[wФЭ(t)]. (1.52)
Формирующий элемент объединяется с непрерывной частью системы в приведенную непрерывную часть.

Рис. 1.7. Расчетная функциональная схема разомкнутой импульсной системы: ПИЭ - простейший импульсный элемент; ФЭ - формирующий элемент; НЧ - непрерывная часть; ПНЧ - приведенная непрерывная часть
Пример. Определить дискретную передаточную функцию импульсной системы, у которой импульсный элемент формирует прямоугольные импульсы длительности g = 0,2 с периодом дискретности T=1 c, а непрерывная часть задана передаточной функцией:
 при k=10 c-1 , T1=2 c.
при k=10 c-1 , T1=2 c.
Р е ш е н и е . Дискретную передаточную функцию разомкнутой импульсной системы находим по выражению (1.62), представляя дробь Wнч(s)/s в виде суммы элементарных дробей:
 .
.
С помощью таблицы соответствий найдем модифицированное z-преобразование для каждого из слагаемых в правой части полученного выражения:
 ,
,
где  .
.
Частные случаи.
1. При s = 0
 .
.
2. При s = 0 и g =1
 .
.
3. При s = 0 и g<< 1, так как T1 >>gТ
 .
.
Корректирующие устройства
Основная задача корректирующих устройств состоит в улучшении точности системы и качества переходных процессов. Однако наряду с этим путем дополнительного введения в систему корректирующих устройств решается более общая задача - обеспечение устойчивости системы, если она была неустойчивой, а затем и желаемого качества процесса управления.
Различают три вида основных корректирующих устройств.
Последовательные корректирующие устройства.Они вводятся в цепь регулятора последовательно с другими звеньями. На рис.8.2 представлена структурная схема системы с последовательным корректирующим устройством.


Рис. 8.2. Структурная схема системы
с последовательным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, WПКУ(s) - передаточная функция последовательного корректирующего звена, WОУ(s) - передаточная функция объекта управления.
Передаточная функция регулятора с последовательным корректирующим устройством
WR1(s) = W1(s) W2(s) WПКУ(s). (8.5)
Способ коррекции с помощью последовательного корректирующего устройства не требует сложных расчетов и прост в практическом исполнении. Поэтому он нашел широкое применение, особенно при коррекции систем, в которых используется электрический сигнал в виде напряжения постоянного тока, величина которого функционально связана с сигналом рассогласования. Однако, последовательные корректирующие устройства не ослабляют влияния изменений параметров элементом системы на ее показатели качества. Поэтому последовательные корректирующие устройства рекомендуется применять в системах, в которых элементы имеют достаточно стабильные параметры.
Параллельные корректирующие устройства.Они вводятся в цепь регулятора параллельно с другими звеньями. На рис.8.3 представлена структурная схема системы с параллельным корректирующим устройством.


Рис.8.3. Структурная схема системы
с параллельным корректирующим устройством
Обратные связи.Они вводятся в цепь регулятора и охватывают какие-либо его звенья. Как отмечалось в разделе 3.3, обратные связи могут быть положительными (ПОС) и отрицательными (ООС), кроме того - жесткими и гибкими.
На рис.8.4 представлена структурная схема системы с корректирующей обратной связью. Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, WОС(s) - передаточная функция корректирующей обратной связи, WОУ(s) - передаточная функция объекта управления.


Рис.8.4. Структурная схема системы с корректирующей обратной связью
Передаточная функция регулятора с корректирующей обратной связью
 , (8.7)
, (8.7)
где знак “+” соответствует ООС, знак “-” - ПОС.
Инерционная гибкая обратная связьWОС(s) = .
.
При охвате ею интегрирующего звена  получаем
получаем
 ,
,
где kЭ - эквивалентный коэффициент передачи;
TЭ - эквивалентная постоянная времени.
При ООС  и
и  ,
,
при ПОС  и
и  .
.
Следовательно, охват интегрирующего звена инерционной гибкой обратной связью эквивалентен последовательному включению интегро-дифференцирующего звена. При отрицательной инерционной гибкой обратной связи и большом коэффициенте передачи k интегрирующее звено приближенно становится изодромным.
.
Динамические свойства линейных систем при введении корректирующих устройств различного вида могут быть сделаны одинаковыми. Следовательно, включение любого типа корректирующего устройства может обеспечить требуемое качество работы системы. В этом случае передаточные функции регуляторов с последовательной коррекцией (8.5), параллельной коррекцией (8.6) и местной обратной связью (8.7) должны быть одинаковыми, т.е.
WR1(s) = WR2(s) = WR3(s). (8.8)
Отсюда следует формула перехода от передаточной функции корректирующего устройства одного вида к передаточной функции эквивалентного корректирующего устройства другого вида
W2(s)WПКУ(s) = W2(s)+WêêКУ(s) =  . (8.9)
. (8.9)
Использование того или иного вида корректирующих устройств, т.е. последовательных звеньев, параллельных звеньев или обратных связей, определяется удобством технической реализации.
КОНТРОЛЬНОЕ ЗАДАНИЕ № 14
по ТАУ
1. Дать формулировку критерия Михайлова. Определить устойчивость систем, годографы Михайлова которых изображены на рис.1 и рис.2. Для неустойчивых систем определить число правых корней.
| n=5 |
| Re |
| Im |
| w=0 |
| 0 |
| w |
| Im |
| Re |
| n=3 |
| 0 |
| w=0 |
| w |
Рис.1 Рис.2
2. Ответ:
Для устойчивости линейной системы необходимо и достаточно, чтобы годограф Михайлова, начинаясь на положительной части вещественной оси, при изменении w от 0 до ¥ последовательно проходил n квадрантов, где n-порядок системы. При этом должно обеспечиваться монотонное изменение модуля радиус-вектора годографа Михайлова. На рис.1 система устойчива, на рис.2 - неустойчива, число правых корней m=1.
Дата добавления: 2018-04-04; просмотров: 622; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!