Основные свойства преобразования Лапласа
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Иркутский государственный университет путей сообщения»
Красноярский институт железнодорожного транспорта
- филиал федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Иркутский государственный университет путей сообщения»
Факультет «Транспортные системы»
Кафедра «Системы обеспечения движения поездов»
АНАЛИЗ системы автоматического регулирования Частоты вращения вала двигателя постоянного тока
КУРСОВОЙ ПРОЕКТ
по дисциплине «Теория автоматического управления»
КП.531112.23.05.05.04-2018.ПЗ
Выполнил
студент гр. СОД.1-15-1
Голобородько И.Ю.
« » ____________ 2018 г.
Принял
доцент Туйгунова А.Г.
« » ____________ 2018 г.
Красноярск 2018
Аннотация
Курсовой проект 48 стр., 32 рис., 7 источников
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Объект управления - двигатель постоянного тока, управляемая величина - частота вращения вала ДПТ.
Целью проекта является:
- анализ исходных данных и моделирование структурной схемы модели;
- оценка устойчивости и стабилизация САР ЧВ ДПТ;
- оптимизация САР ЧВ ДПТ;
- оценка качества САР ЧВ ДПТ.
Принцип действия САР основан на управлении по отклонению, что определяется наличием в САР главного контура управления. Управление по отклонению позволяет системе осуществлять слежение (поддерживать частоту вращения вала двигателя пропорциональной заданию), а также, косвенно, стабилизацию (компенсировать влияние возмущений на частоту вращения вала двигателя постоянного тока).
Содержание | ||||
|
| ||||
| Введение | 5 | |||
| Исходные данные | 7 | |||
| Описание принципа действия САР | 8 | |||
| 1 | Определение передаточных функций элементов САР | 10 | ||
| 2 | Моделирование структурной схем САР | 13 | ||
| 3 | Оценка устойчивости разомкнутого контура САР | 14 | ||
| 4 | Стабилизация разомкнутого контура САР | 15 | ||
| 4.1 | Стабилизация разомкнутого контура САР с помощью | |||
| уменьшения коэффициента усиления усилителя | 15 | |||
| 4.2 | Стабилизация разомкнутого контура САР с помощью | |||
| увеличения коэффициента усиления усилителя | 18 | |||
| 4.3 | Стабилизация разомкнутого контура САР с помощью | |||
| уменьшения постоянной времени гибкой обратной связи по | ||||
| Напряжению | 19 | |||
| 4.4 | Стабилизация разомкнутого контура САР с помощью | |||
| уменьшения постоянной времени гибкой обратной связи по | ||||
| напряжению (ОСН) и изменение коэффициента усиления усилителя | 21 | |||
| 4.5 | Определение ЛАЧХ и ЛФЧХ стабилизированной | |||
| разомкнутой САР | 22 | |||
| 5 | Оценка устойчивости замкнутой САР | 25 | ||
| 6 | Коррекция замкнутой САР | 27 | ||
| 6.1 | Введение в контур управления П-регулятора | 30 | ||
| 6.2 | Введение в контур управления ПИ-регулятора | 31 | ||
| 7 | Оценка качества САР замкнутого контура | 37 | |
| 8 | Определение области устойчивости САР | 40 | |
| 9 | Свойства и преобразования Лапласа | 43 | |
| Заключение | 47 | ||
| Библиографический список | 48 |
Введение
Теория автоматического управления является разделом технической кибернетики. Кибернетика – наука об управлении, связи и переработке информации в технических, биологических или социальных системах. Кибернетика техническая – это отрасль науки, изучающая технические системы управления с информационной стороны, независимо от энергетических или конструкционных характеристик реальных систем. Объектом технической кибернетики являются сложные системы автоматического и автоматизированного управления, устройства и комплексы для получения, передачи, обработки и хранения информации. Одной из таких система является САУ.
Система автоматического управления– это совокупность взаимодействующих в едином процессе управления объекта и автоматического управляющего устройства. При анализе и синтезе САУ применяются схемы, т.е. геометрическое моделирование, которое представляет собой графическое изображение их составных частей с более или менее подробным указанием связей между ними. Используются три вида схем САУ: принципиальная; функциональная; структурная (или алгоритмическая).
Принципиальной (полной) схемой называется схема, определяющая полный состав элементов и связей между ними и, как правило, дающая детальное представление о принципах работы изделия (установки). Схемами принципиальными пользуются для изучения принципов работы изделий, а также при их наладке, контроле и ремонте. Схема функциональная– это схема, разъясняющая определенные процессы, протекающие в отдельных функциональных цепях изделия (установки) или в изделии (установке) в целом. Схемами функциональными пользуются для изучения принципов работы изделий (установок), а также при их наладке, контроле и ремонте.
Схема структурная– это такая схема, которая определяет основные функциональные части изделия, их назначение и взаимосвязи. В ТАУ под
структурной (алгоритмической) схемой САУ понимается графическое изображение системы в виде взаимосвязанных динамических звеньев. Под динамическим звеном здесь понимается математическая модель некоторой части САУ, которая определенным образом связана со структурой системы. Классифицировать системы автоматического управления можно по методу управления и функциональному признаку. По методу управления все системы делятся на два больших класса: обыкновенные (не самонастраивающиеся) и самонастраивающиеся (адаптивные).Обыкновенные системы, относящиеся к категории простых, не изменяют своей структуры в процессе управления. Они наиболее разработаны и широко применяются в литейных и термических цехах. Обыкновенные системы автоматического управления подразделяют на три подкласса: разомкнутые, замкнутые и комбинированные системы управления. Замкнутые системы автоматического управления, работающие по принципу отклонения, называют также системами автоматического регулирования (САР).Их отличительной чертой является наличие замкнутого контура прохождения сигналов, т. е. наличие обратного канала, по которому информация о состоянии регулируемой величины передается на вход элемента сравнения.
Исходные данные
Функциональная схема САР моделируется по схеме (рисунок 1) в соответствие с номером варианта (N=4).
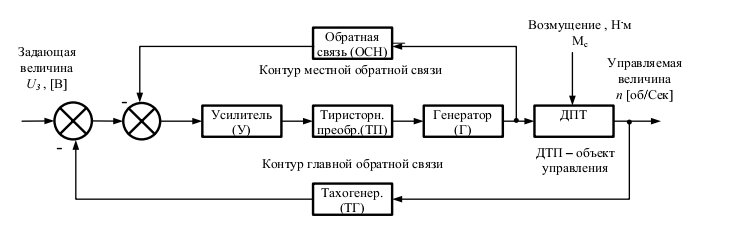
Рисунок 1 – Исходная функциональная схема САР ЧВ ДПТ
У – усилитель; ТП – тиристорный преобразователь; Г – генератор;
ДПТ – двигатель постоянного тока; ТГ – тахогенератор; ОСН – гибкая обратная связь по напряжению; ДПТ – двигатель постоянного тока независимого возбуждения (объект управления); Uз – напряжение в соответствии с заданием, пропорционально которому должна изменяться частота n вращения вала ДПТ;
Мс – возмущающий момент силы (возмущение)
Описание принципа действия САР
Задачей данной системы автоматического регулирования является управление электродвигателем постоянного тока (регулировка количества оборотов вала электродвигателя в минуту). САР состоит из двух контуров с обратной связью. Контур с местной обратной связью состоит из усилителя, тиристорного преобразователя, генератора и обратной связи по напряжению. Усилитель предназначен для усиления входного сигнала, перед подачей на тиристорный преобразователь, который служит для плавного пуска и длительного регулирования скорости вращения вала электродвигателя. Обратная связь по напряжению является местной обратной связью, позволяет оценить ошибку между необходимым напряжением, которое необходимо подать на электродвигатель и напряжением, которое подает генератор. В контур главной обратной связи входит тахогенератор, который преобразует частоту вращения вала в напряжение, он позволяет определить ошибку регулирования всей системы. Следует отметить, что в предлагаемой схеме фактически изменять можно только параметры усилителя и звена местной обратной связи. Эти элементы введены в схему как раз для того, чтобы обеспечить возможность её коррекции. Не исключено, что параметры звена обратной связи по напряжению (ОСН) заданы неудачно и потребуют существенной коррекции.
Работа САР ЧВ ДПТ "Вариант-4" в статике. В статике входные, а, следовательно, и выходные, сигналы САР постоянны. На первый, левый сумматор контура главной обратной связи, его сравнивающее устройство, подается задающая величина и величина с выхода тахогенератора, пропорциональная частоте вращения вала.
Разностный сигнал, имеющий малую величину, усиливается усилителем, тиристорным преобразователем и генератором, в результате чего получается входной, управляющий сигнал ДПТ (двигателя постоянного тока,), т.е. напряжение на якоре. Вследствие наличия этого напряжения вал двигателя вращается,
Выполняя функцию: обеспечивает слежение в статике, поддерживая частоту вращения вала.
Работа САР ЧВ ДПТ в динамике. Изменение задания в первый момент времени приводит к соответствующему росту отклонения, поскольку звенья перед объектом и сам объект обладают инерционностью и поэтому частота вращения вала не может измениться мгновенно. Изменение отклонения, будучи усиленным усилителем, тиристорным преобразователем и генератором, с учётом их инерционности приводит к постепенному изменению управляющей величины – напряжения на якоре, которое плавно изменяет частоту вращения вала так, что ошибка слежения, т.е. отклонение, устремляется к нулю. Обратная связь по напряжению стабилизирует САР и повышает её быстродействие. Таким образом, осуществляется слежение.
Изменение возмущения, момента на валу двигателя, приводит к изменению частоты вращения, которое, вследствие наличия главной обратной связи приводит к соответствующему изменению отклонения. Это изменение отклонения усиливается и тем самым изменяет величину напряжения на якоре так, что отклонение частоты, вызванное изменением возмущения, компенсируется. Таким образом, осуществляется стабилизация частоты вращения вала двигателя.
1 Определение передаточных функций элементов САР
Усилитель (У) моделируется как инерционное звено первого порядка (апериодическое звено) с передаточной функцией



где  – коэффициент усиления усилителя;
– коэффициент усиления усилителя;
 – постоянная времени усилителя, с;
– постоянная времени усилителя, с;
 – номер варианта.
– номер варианта.
Тиристорный преобразователь (ТП) моделируется как инерционное звено первого порядка с передаточной функцией



где,  – коэффициент усиления теристорного преобразования;
– коэффициент усиления теристорного преобразования;
 – постоянная времени теристорного преобразования, с;
– постоянная времени теристорного преобразования, с;
– номер варианта.
Гибкая обратная связь по напряжению, инерционно -дифференцирующее звено(ОСН)



где  – коэффициент обратной связи;
– коэффициент обратной связи;
 – постоянная времени;
– постоянная времени;
– номер варианта.
Тахогенератор (ТГ), усилительное (пропорциональное) звено


где  – коэффициент усиления тахогенератора, В
– коэффициент усиления тахогенератора, В  сек/об.;
сек/об.;
– номер варианта.
Генератор (Г), инерционное звено первого порядка (апериодическое звено) с передаточной функцией



где  – коэффициент усиления генератора;
– коэффициент усиления генератора;
 – постоянная времени генератора;
– постоянная времени генератора;
– номер варианта.
Двигатель постоянного тока (ДПТ) с независимым возбуждением является инерционным звеном второго порядка (колебательное звено). Его передаточная функция по каналу управления определяется по формуле

а по каналу возмущения (по управляющему воздействию напряжения генератора)





где  – коэффициент усиления двигателя;
– коэффициент усиления двигателя;
 – коэффициент усиления двигателя;
– коэффициент усиления двигателя;
 – постоянная времени якоря;
– постоянная времени якоря;
 – постоянная времени колебательного звена;
– постоянная времени колебательного звена;
– номер варианта.
Вывод: совокупность передаточных функций элементов и функциональной схемы позволяет построить структурно-алгоритмическую модель САР, а также аналитическую модель, представляющую собой передаточную функцию всей САР.
2Моделирование структурной схем САР
Для моделирования необходимо вынести на рабочее поле программы VisSim блоки, соединив их в соответствии с функциональной схемой (Рисунок 1).
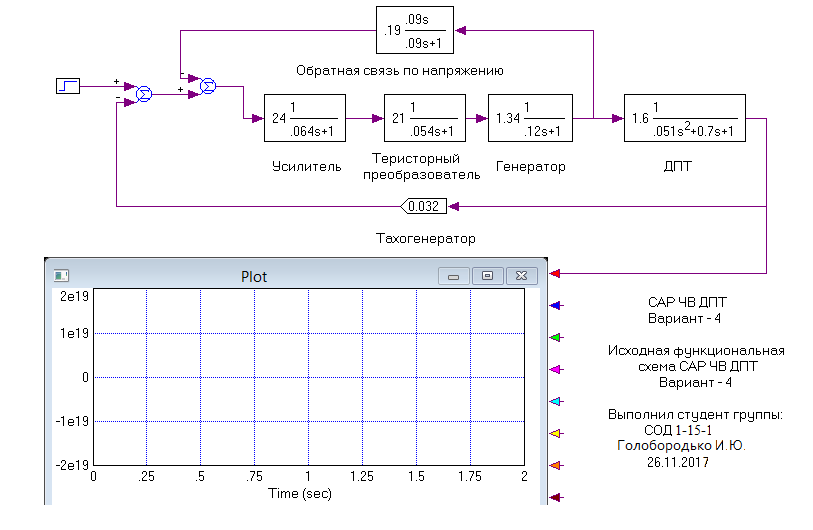
Рисунок 2.1 – Исходная функциональная схема САР ЧВ ДПТ
Построение разомкнутого контура осуществляется по такой же схеме что замкнутой САР, выход усилителя обратной связи подключается к программному (виртуальному) осциллографу.
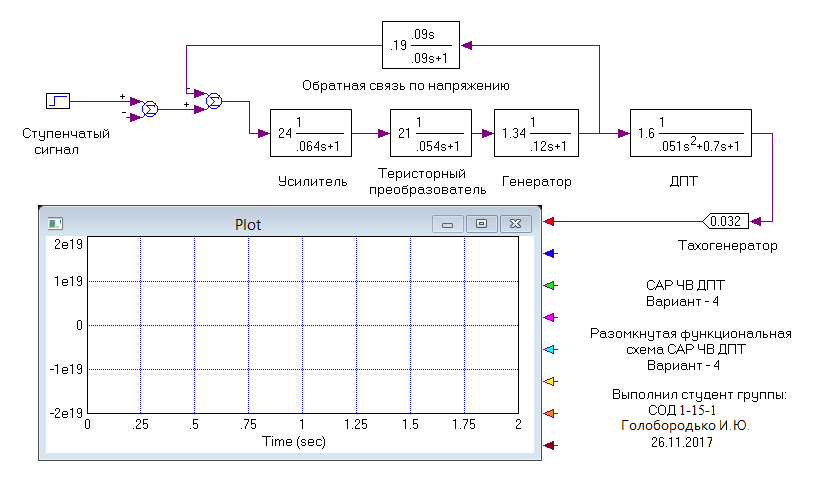
Рисунок 2.2 – Разомкнутая функциональная схема САР ЧВ ДПТ
Вывод: моделирование схем осуществлялось для дальнейшей проверки устойчивости САР ЧВ ДПТ.
3 Оценка устойчивости разомкнутого контура
Разомкнутый контур САР состоит из устойчивых элементов, но в свою очередь, содержит контур местной обратной связи. Следовательно, САР может быть неустойчивой в разомкнутом состоянии.
Оценка устойчивости разомкнутой САР осуществляется с целью проверки выполнения необходимого условия практического применения критерия Найквиста: разомкнутый контур должен быть устойчивым.
Потеря устойчивости, разомкнутой САР возникает из-за наличия местной обратной связи.
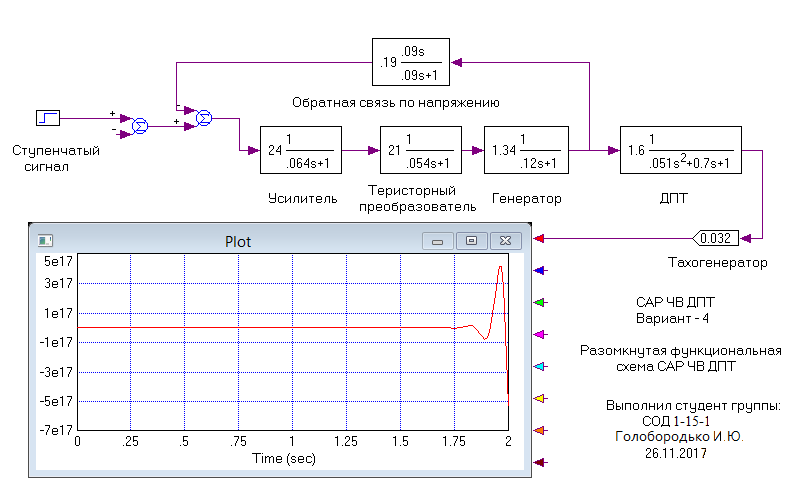
Рисунок 3.1 – Оценка устойчивости разомкнутой САР ЧВ ДПТ
Вывод: из переходной характеристики видно, что разомкнутый контур неустойчив, поскольку его выходной сигнал представляет собой колебания с быстро увеличивающейся амплитудой.
4Стабилизация разомкнутого контура САР
Стабилизация разомкнутой САР осуществляется с целью обеспечения выполнения необходимого условия практического применения критерия Найквиста: разомкнутый контур должен быть устойчивым с запасом по амплитуде в диапазоне 6-20 дБ.
Изменяя параметры элементов контура местной обратной связи: коэффициенты усиления усилителя и тиристорного преобразователя, а возможно, и постоянной времени звена ОСН, добиться, чтобы переходный процесс стал апериодическим с перерегулированием не более 5 ÷ 20 %.
4.1 Стабилизация разомкнутого контура САР с помощью уменьшения коэффициента усиления усилителя
Стабилизация разомкнутой САР проводится путем уменьшения коэффициента усиления усилителя. При увеличение коэффициента усиления, стабилизация САР не возможна.
 Рисунок 4.1.1– Стабилизация контура уменьшением коэффициента усиления усилителя с 24 до 15
Рисунок 4.1.1– Стабилизация контура уменьшением коэффициента усиления усилителя с 24 до 15
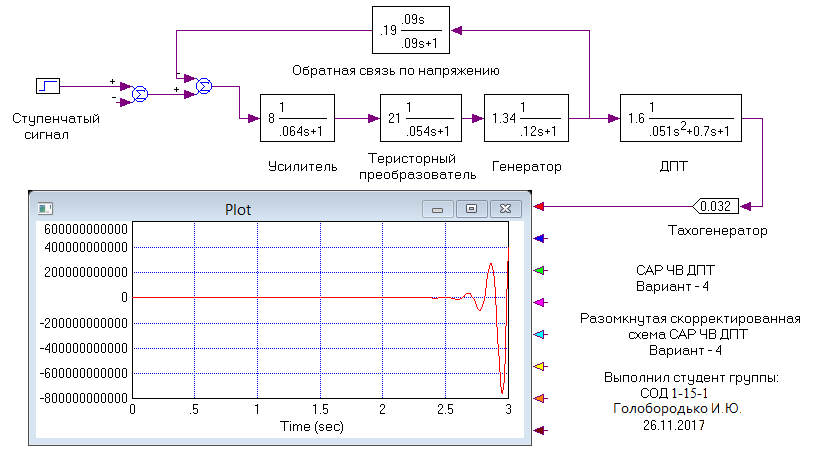
Рисунок 4.1.2– Стабилизация контура уменьшением коэффициента усиления усилителя с 24 до 8

Рисунок 4.1.3– Стабилизация контура уменьшением коэффициента усиления усилителя с 24 до 3

Рисунок 4.1.4– Стабилизация контура уменьшением коэффициента усиления усилителя с 24 до 2
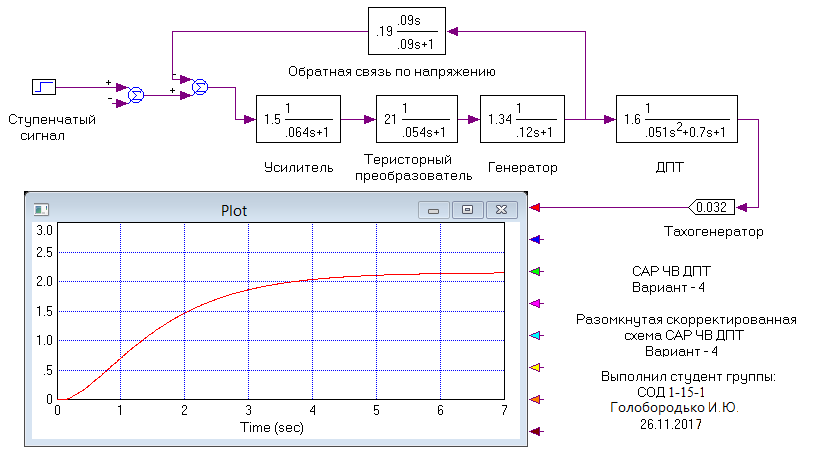
Рисунок 4.1.5– Стабилизация контура уменьшением коэффициента усиления усилителя с 24 до 1.5
Вывод: понижение коэффициента усиления усилителя позволило привести САР к граничному режиму,но система все еще имеет нестабильное состояние и требует проведения более серьезной коррекции.
4.2 Стабилизация разомкнутого контура САР с помощью увеличения постоянной времени гибкой обратной связи по напряжению(ОСН)
Стабилизация контура САР путем увеличения постоянной времени ОСН проводится до тех пор, пока разомкнутый контур не будет в состояние близком к граничному режиму.
Увеличение постоянной времени ОСНс 0,09 до 5

Рисунок 4.2.1–Стабилизация контура увеличением коэффициента постоянной времени звена ОСН
Вывод: из графика видно, что стабилизация путем увеличения постоянной времени звена ОСН не возможна, следовательно, нужно провести стабилизацию с помощью уменьшения постоянной времени звена ОСН.
4.3 Стабилизация разомкнутого контура САР с помощью уменьшения постоянной времени гибкой обратной связи по напряжению(ОСН)
Стабилизация контура САР путем уменьшения постоянной времени ОСН проводится до тех пор, пока разомкнутый контур не будет в состояние близком к граничному режиму.
Уменьшения постоянной времени ОСН с 0,09 до 0,006 приведена на рисунке 4.3.1, а на рисунке 4.3.2 уменьшение постоянной времени ОСН до 0,00006
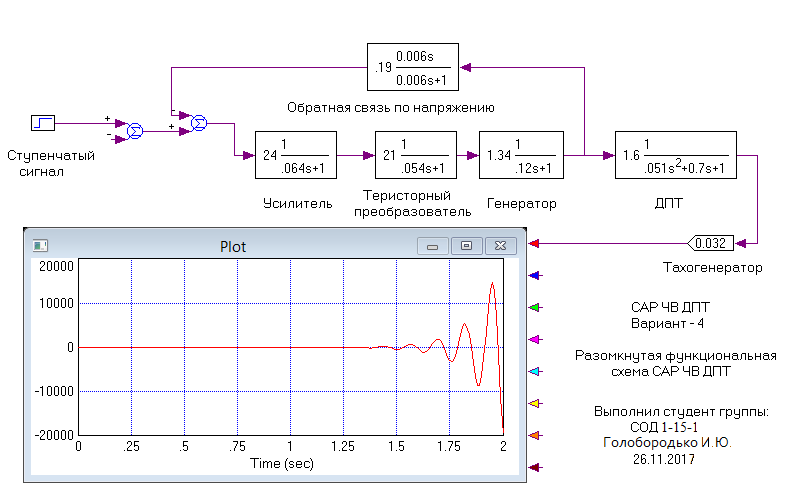
Рисунок 4.3.1 –Стабилизация контура уменьшением коэффициента постоянной времени звена ОСН
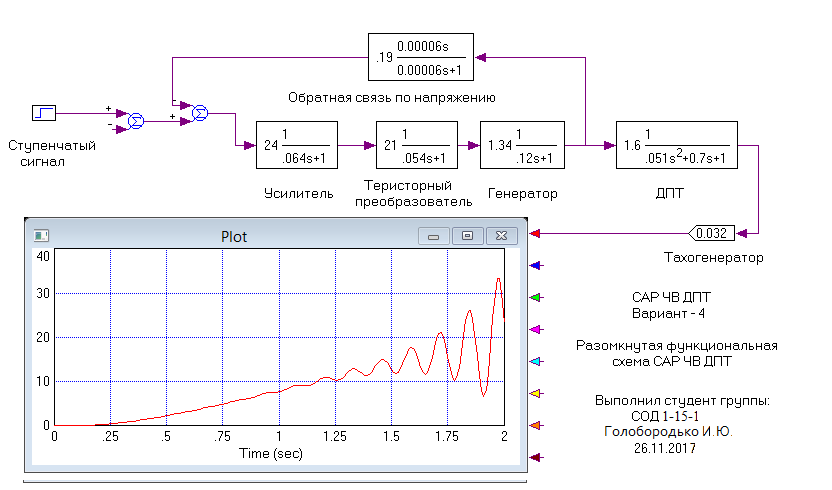
Рисунок 4.3.2 –Стабилизация контура уменьшением коэффициента постоянной времени звена ОСН
Вывод: из графиков видно, что стабилизация контура с помощью уменьшения обратной связи по напряжению невозможна. Проводится двойная стабилизация с уменьшения коэффициента усилителя и постоянной времени звена ОСН.
4.4 Стабилизация разомкнутого контура САР с помощью уменьшения постоянной времени гибкой обратной связи по напряжению(ОСН) и изменением коэффициента усиления усилителя
Стабилизация разомкнутого контура САР при коэффициенте усиления усилителя 1,5 и с постоянной времени ОСН 0,006
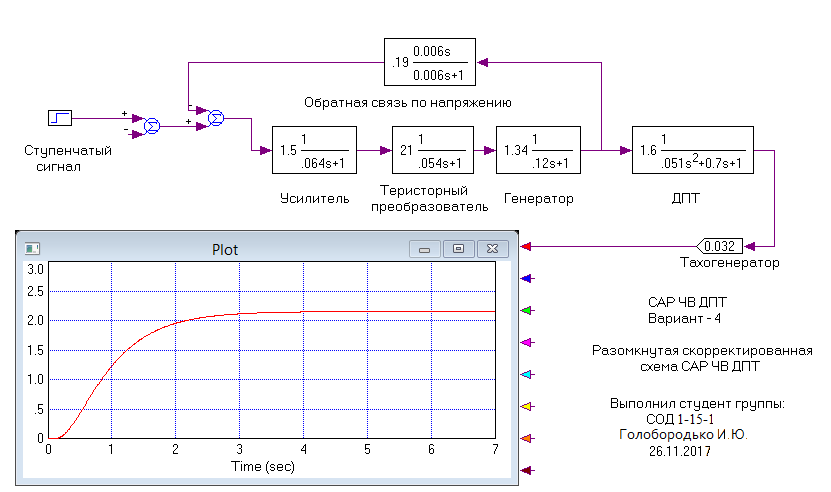
Рисунок 4.4.1 –Двойная стабилизация разомкнутого контура САР ЧВ ДПТ
Вывод: уменьшение коэффициента усиления усилителя и постоянной времени звена ОСН привели САР к неплохому качеству, но система автоматического регулирования все еще не стабильна и требует более серьезной коррекции.
4.5 Определение логарифмической амплитудно-частотной и фазо-частотной характеристики стабилизированной разомкнутой системы автоматического регулирования
Построения и анализ ЛАЧХ и ЛФЧХ. Необходимо выделить все элементы кроме источника ступенчатого сигнала и осциллографа (рисунок 4.5.1)
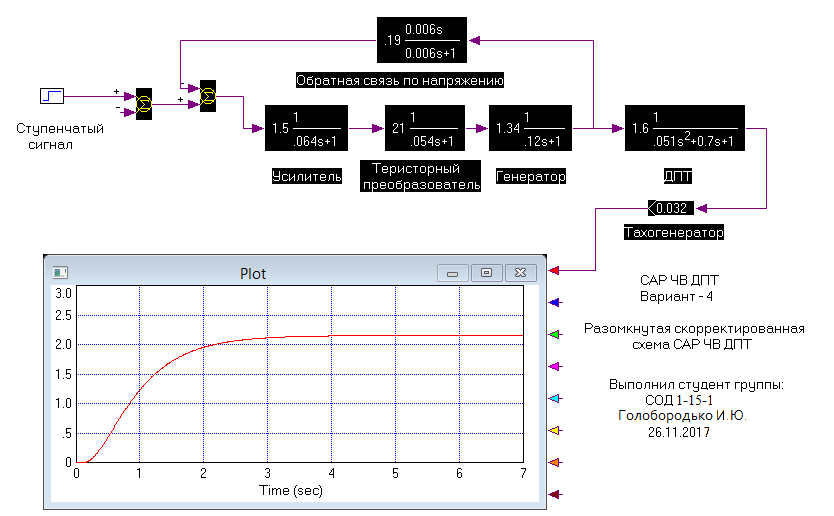
Рисунок 4.5.1 – Выделенные элементы необходимые для построения ЛАЧХ и ЛФЧХ
Задать необходимые пределы частотного диапазона, в котором будут построены характеристики. Для этого следует выбрать Analyze – FrequencyRange и в появившемся окне задать начало и конец диапазона.Берем три декады, от 0.1 рад/сек до 100 рад/сек (рисунок 4.5.2).
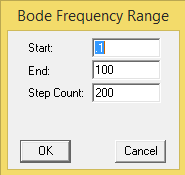
Рисунок 4.5.2 – Задание начала и конца частотного диапазона и числа шагов дляпостроения ЛАЧХ и ЛФЧХ
Построение характеристики ЛАЧХ и ЛФЧХ осуществляется при разомкнутой устойчивой САР (рисунок 14). Для этого в меню Analyze выбирается пункт FrequencyResponse.
Рисунок 4.5.3 –Обеспечение запасов устойчивости по фазе и амплитуде смещением ЛАЧХ
Корректирование САР осуществляется путем уменьшения коэффициента усиления с тем, чтобы обеспечить необходимые запасы устойчивости:
– по фазе в пределах 400 – 700 и даже более;
– по амплитуде 12 – 20 дБ.
На графике ЛАЧХ и ЛФЧХ(рисунок 4.5.3) видно, что запасы устойчивости по фазе (j = 73,33) и по амплитуде (L = 12 дБ) выполняются, следовательно, проведение корректирования САР не требуется.
Производится построение графика ЛФЧХ в относительных единицах
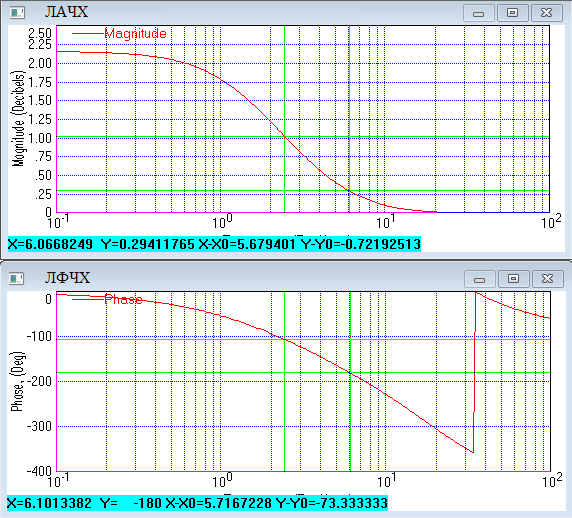
Рисунок 4.5.4 – График ЛАЧХ в относительных единицах
Из графика ЛАЧХ видно изменение амплитуды с 1,01 дБ до 0,29 дБ, это соответственно уменьшению усиления контура в 3,5 раза.
Полученное усиление контура в 0,72 дБ мало, поэтому в контур управления вводится усилитель (gain) – П-регулятор с коэффициентом усиления
Вывод: запасы устойчивости САР соблюдаются, но полученное усиление контура очень, следовательно, необходимо ввести П – регулятор с коэффициентом усиления 0,28.
5 Оценка устойчивости замкнутой системы автоматического регулирования
Из графика видно (рисунка 5.1), что система устойчива, но колебательность переходной характеристики чрезмерна.
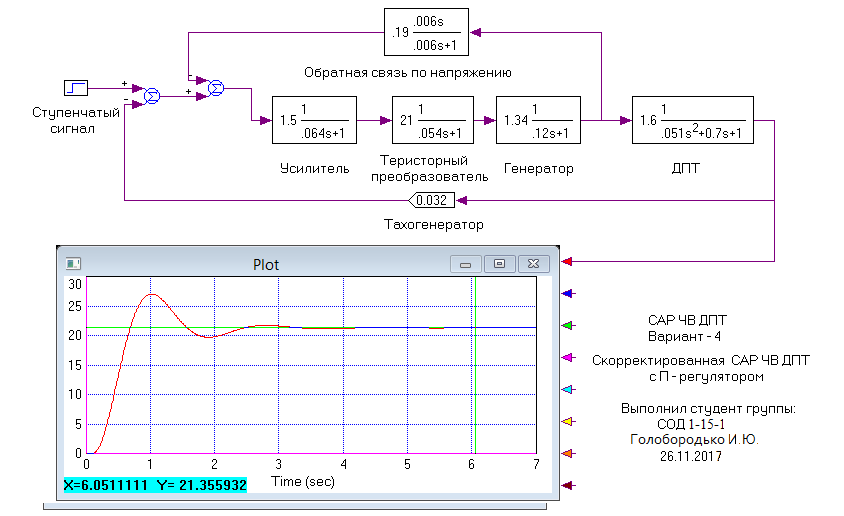
Рисунок 5.1 – Замкнутая САР с предварительной стабилизацией
Точное значение переходной функции составляет 31,25 об/сек., как видно из графика (рисунок 5.1) установившееся значение равно 21,35 об/сек, следовательно, установившееся значение на 31,68% меньше точного значения.


Необходимо определить показатель колебательности, для этого нужно перейти к графику ЛАЧХ и на нем отметить максимальное и соответствующее частоте 100 рад/с значение.
Рисунок 5.2 – Определение максимального значения и значения, соответствующего частоте 100 рад/с ЛАЧХ
Показатель колебательности равен
Вывод: точность полученной системы в установившемся режиме неудовлетворительна, так как показатель колебательности очень велик.
6 Коррекция замкнутой системы автоматического регулирования
Если замкнутая система после первоначального ориентировочного выбора ее параметров оказалась неустойчивой, то следующим шагом в ее проектировании является ее стабилизация. Обычно для стабилизации сначала пытаются, не изменяя структуры системы, выбирать некоторые ее настраиваемые параметры так, чтобы они находились внутри области устойчивости достаточно далеко от ее границ. Для этой цели удобно воспользоваться построением областей устойчивости в плоскости настраиваемых параметров. Если же такая стабилизация не удается, то переходят к видоизменению структуры системы. Для этого обычно вводят в нее дополнительные корректирующие (стабилизирующие) звенья.
Различают шесть основных видов корректирующих звеньев: пропорциональны (П);интегральные (И); дифференциальные (Д);пропорционально-интегральные (ПИ);пропорционально-дифференциальные (ПД) и ПИД.
Пропорциональный регулятор реализуется на основе безынерционного звена и имеет следующую передаточную функцию

где  – пропорциональная составляющая передаточного коэффициента.
– пропорциональная составляющая передаточного коэффициента.
Преимуществами такого регулятора являются быстродействие и простота реализации, но он в то же время обладает ограниченной точностью.
Интегральный регулятор
Передаточная функция интегрального регулятора имеет вид
где  – интегральная составляющая передаточного коэффициента;
– интегральная составляющая передаточного коэффициента;
 – постоянная времени интегрирования.
– постоянная времени интегрирования.
При использовании такого типа регуляторов в системе сглаживаются кратковременные выбросы отклонения, и увеличивается (по сравнению с предыдущим) точность в установившемся режиме. В то же время большая, чем у пропорционального регулятора колебательность, приводит к понижению точности в переходных режимах.
Дифференциальныйрегулятор
Передаточная функция интегрального регулятора имеет вид

где  – дифференциальная составляющая передаточного коэффициента;
– дифференциальная составляющая передаточного коэффициента;
 – постоянная времени дифференцирования.
– постоянная времени дифференцирования.
На практике подобный тип регулятора почти не применяется из-за невозможности практической реализации идеального дифференцирующего звена, но при необходимости возможно использование такого регулятора в виде инерционного интегрирующего звена с введением дополнительной постоянной времени.
Пропорционально-интегральный регулятор
Передаточная функция такого регулятора имеет вид

Регулятор обеспечивает высокую точность в установившемся режиме, а точность в динамическом режиме зависит от соотношения пропорциональной и интегральной составляющих передаточного коэффициента.
Пропорционально-дифференциальный регулятор
Передаточная функция такого регулятора имеет вид

Пропорционально-дифференциальный регулятор реагирует не только на величину сигнала ошибки, но и на скорость его изменения, т. е. введение в систему ПД регулятора позволяет упреждать появление отклонений.
Благодаря этому ПД регулятор обладает наибольшим быстродействием, но при этом снижается точность в установившемся режиме.
ПИД-регулятор
Передаточная функция ПИД-регулятора имеет вид

где коэффициенты связаны соотношениями

ПИД-регулятор объединяет в себе все преимущества рассмотренных регуляторов. Но его применение далеко не всегда целесообразно из-за сложности технической реализации.
6.1 Введение в контур управления П-регулятора
Передаточная функция П-регулятора определяется по формуле

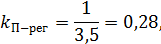
где  коэффициент передачи П-регулятора.
коэффициент передачи П-регулятора.
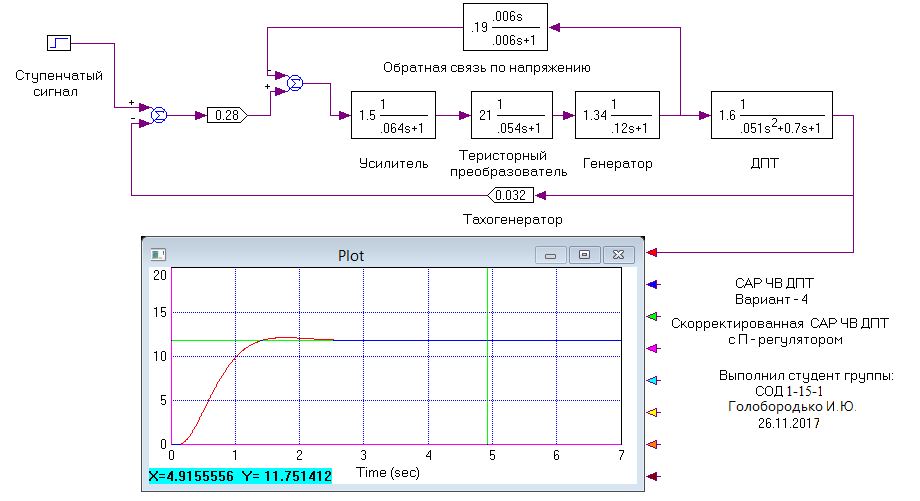
Рисунок 6.1.1 –Переходная характеристика предварительно скорректированной САР ЧВ ДПТ
При безошибочной работе в установившемся режиме, отрабатывая единичную ступеньку, САР обеспечивала бы на выходе 1/0.032 = 31,25 об/сек, в то время, как полученная САР обеспечивает только 11.75об/сек (рисунок 6.1.1). Где 0.032 – коэффициент усиления тахогенератора, установленного в обратной связи главного контура управления.
Относительная ошибка регулирования составляет

Вывод: Данная оптимизация усиления контура не позволяет получить САР удовлетворительного качества. Следует провести более серьезную коррекцию САР с введением ПИ-регулятор в контур управления и оптимизировать его настроечные параметры.
6.2Введение в контур управления ПИ-регулятора
Задача оптимизации сводится к нахождению настроечных параметров ПИ-регулятора: постоянной времени и коэффициента усиления.
Передаточная функция ПИ-регулятора имеет вид

где  – коэффициент усиления ПИ-регулятора;
– коэффициент усиления ПИ-регулятора;
 – постоянная времени ПИ-регулятора.
– постоянная времени ПИ-регулятора.
Для определения постоянной времени регулятора следует взять ЛАЧХ рисунок 6.2.1, для которой выполнены требования к запасам по фазе и амплитуде, и провести к ней касательные с наклонами 0 дБ/дек и -20 дБ/дек.Частота точки сопряжения касательных с наклоном 0 дБ/дек и -20 дБ/дек является обратной величиной к искомой постоянной времени ПИ-регулятора.
Рисунок 6.2.1 –Определение постоянной времени ПИ-регулятора по ЛАЧХ.
Постоянная времени ПИ – регулятора
1/Т = 2,56рад/сек, Т = 0,39 сек.
Коэффициент усиления ПИ-регулятора

Вводится ПИ – регулятор с параметрами (рисунок 6.2.2)

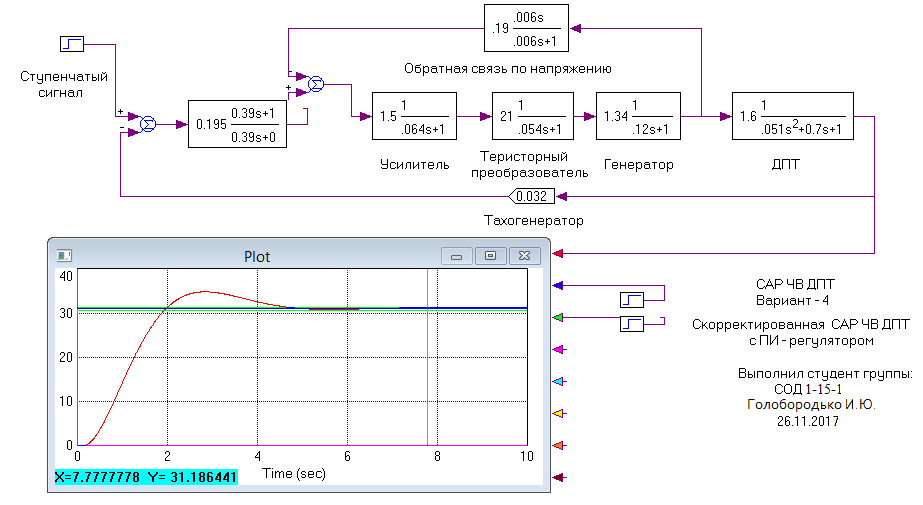
Рисунок 6.2.2 – САР ЧВ ДПТ с ПИ – регулятором
Время регулирования и перерегулирование изображено на рисунке 6.2.3.
Рисунок 6.2.3 – Переходная характеристика САР ЧВ ДПТ с ПИ – регулятором
При безошибочной работе в установившемся режиме, отрабатывая единичную ступеньку, САР обеспечивала бы на выходе 1/0.032 = 31,25 об/сек, в то время, как полученная САР обеспечивает только 31,18 об/сек (рисунок 6.2.3). Где 0.032 – коэффициент усиления тахогенератора, установленного в обратной связи главного контура управления.
Относительная ошибка регулирования составляет

Перерегулирование равно 0,22 %, следовательно, САР имеет уже неплохое качество.
Выполненное регулирование достаточно для применения ПИ-регулятора в схему. Поскольку использованный для коррекции метод определения настроечных параметров ПИ-регулятора приближенный, то несколько улучшить качество САР можно уточнением значений коэффициента усиления регулятора и его постоянной времени в пределах нескольких десятков процентов.
Уточнение настроечных параметров ПИ-регулятора не требуется. Таким образом, в результате структурно-параметрической оптимизации получена схема САР, сравнивающаяся с двигателем постоянного тока (ДПТ), рисунок 6.2.4.
Для удобства сравнения переходная характеристика ДПТ увеличена в15 раз.

Рисунок 6.2.4 – Оптимизированная модель САР и её переходная функция
Из рисунка 6.2.5 видно, что двигатель под управлением САР начинает изменять частоту более плавно по сравнению с тем, когда на него непосредственно поступает ступенчатое приращение напряжения якоря, а время регулирования САР практически такое же, как и у ДПТ в автономной работе.
Рисунок 6.2.5 –Переходные функции САР и её объекта управления – ДПТ (значения увеличены в 15 раз)
Приведем ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР (рисунок 6.2.6).
Рисунок 6.2.6 –ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР
Запасы устойчивости и по фазе –57,70 а по амплитуде – 19. Переходная характеристика разомкнутого контура линейно увеличивается со временем, что объясняется наличием ПИ – регулятора, рисунок 6.2.7.

Рисунок 6.2.7 - Переходная характеристика разомкнутого контура оптимизированной САР
Вывод: введение ПИ – регулятора позволило получить замкнутую САР удовлетворительного качества.
7 Оценка качества системы автоматического регулирования замкнутого контура
Показатели качества переходного режима
Показатели качества переходного режима определяются по переходной характеристике САР, рисунок 6.2.5, следовательно,  =1,95 сек и σ=1% (это относительное превышение первого максимума переходной функции над ее установившимся значением).
=1,95 сек и σ=1% (это относительное превышение первого максимума переходной функции над ее установившимся значением).
Показатели качества установившегося режима
Коэффициенты ошибок характеризуют точность работы САР в установившемся режиме. Для статической САР хорошего качества величина с0 должна находиться в пределах 0.01–0.1, для астатических САР с0 =0. Коэффициенты с1 и с2 характеризуют коэффициенты быстродействие САР в установившемся режиме работы и поэтому их величины напрямую не регламентируются.
При ступенчатом воздействии установившееся значение ошибки – это коэффициент С0, при линейно растущем воздействии (если С0= 0) – это коэффициент С1.
Рисунок 7.1 – Диаграмма при ступенчатом воздействии для определения коэффициента ошибки по положению астатической САР
Коэффициент ошибки по положению

Поскольку оптимизированная САР является астатической, то ее коэффициент ошибки  =0. Это видно из рисунка 7.1. Для определения коэффициента ошибки по скорости
=0. Это видно из рисунка 7.1. Для определения коэффициента ошибки по скорости  , к входу САР нужно подключить генератор линейно растущего сигнала, рисунок 7.2.
, к входу САР нужно подключить генератор линейно растущего сигнала, рисунок 7.2.
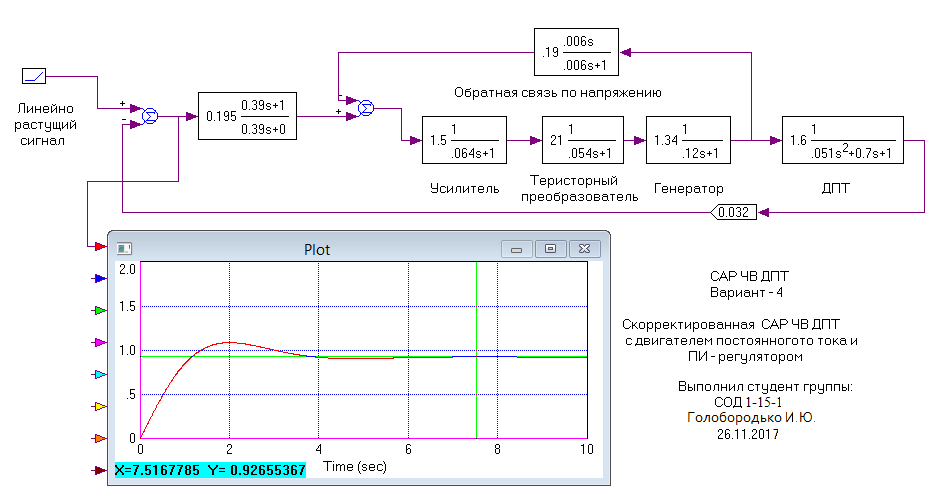
Рисунок 7.2 – Коэффициента ошибки по скорости астатической САР
Коэффициент ошибки по скорости

САР ЧВ ДПТ осуществляет слежение и стабилизацию.
Для проверки качества САР в режиме слежения и в режиме стабилизации следует одновременно подать не нее ступенчатое воздействие и ступенчатое возмущение. Этим воздействиям для наглядности переходной характеристики следует придать разные задержки.
Полученное совокупное воздействие на САР ЧВ ДПТ показано на рисунке 7.3.Возмущение задержано относительно задания на 10сек. По переходной характеристике видно, что САР компенсирует возмущение примерно за 31 сек, с максимальной ошибкой в – 7,45 об/сек при величине возмущения в 23 Н·м.
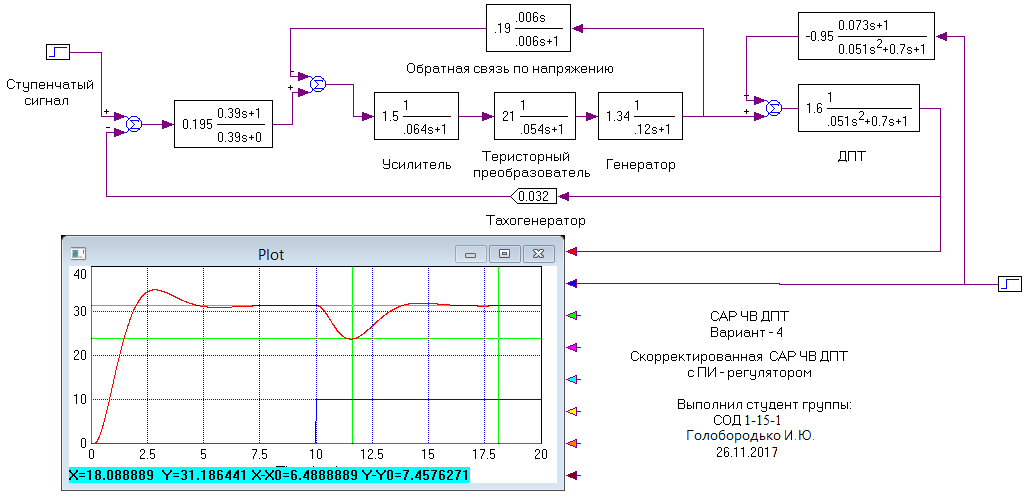
Рисунок 7.3 – Совокупное воздействиена САР ЧВ ДПТ ступенчатого воздействия и возмущения
Вывод: САР ЧВ ДПТ является астатической и ее коэффициент ошибки по положению равен нулю, в то время как коэффициент ошибки по скорости равен 0,92, следовательно, САР имеет неплохое качество.
8 Определение области устойчивости системы автоматического регулирования
Определение области устойчивости САР может быть осуществлено с помощью критерия Найквиста. Критерий Найквиста предназначен для анализа устойчивости замкнутых систем.
Для случая, если разомкнутая цепь устойчива, условия устойчивости замкнутой САУ сводится к требованию, чтобы амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой цепи не охватывала точку (- 1, j0).
Следовательно, если АФЧХ разомкнутой цепи проходит через точку (- 1, j0), то замкнутая САУ будет находится на границе устойчивости.
Построение АФЧХ осуществляется при разомкнутой системе. Необходимо выделить все элементы кроме, источника ступенчатого сигнала и осциллографа (рисунок 8.1) и во вкладке Analyzeвыбрать пункт NyquistResponse.
Область устойчивости системы автоматического регулирования по критерию Найквиста показана на рисунке 8.2.

Рисунок 8.1 – Элементы используемый при построение АФЧХ
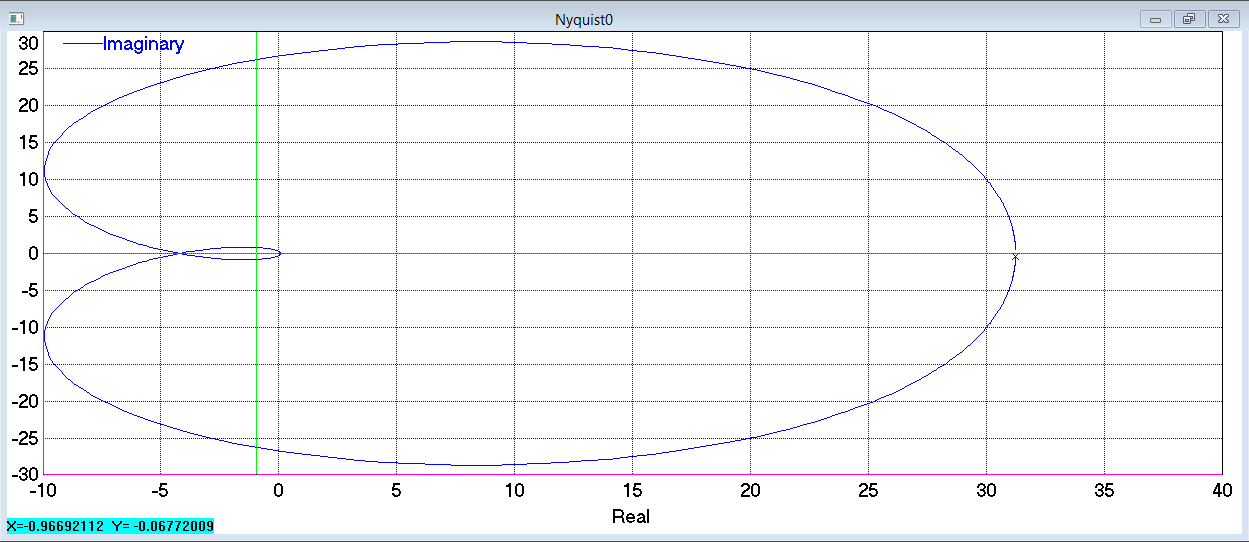
Рисунок 8.2 – Область устойчивости САР по критерию Найквиста
Вывод: Для того чтобы замкнутая система была устойчива, необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении w от нуля до бесконечности не охватывала точку с координатами (-1; j0).
9 Свойства и преобразования Лапласа
В общем случае дифференциальное уравнение, связывающее входной и выходной сигналы линеаризованной системы, имеет следующий вид


Решение дифференциальных уравнений зачастую связано со значительными трудностями, а во многих случаях, например, в следящих системах, не может быть осуществлено, так как неизвестно управляющее воздействие. По этим причинам исследование систем ведется косвенными методами, например, базирующимися на операционном преобразовании Лапласа.
Преобразованием Лапласаназывают интегральное преобразование

определяющее соответствие между функцией  вещественного переменного и функцией
вещественного переменного и функцией  комплексного переменного
комплексного переменного  . При этом
. При этом  называюторигиналом, а
называюторигиналом, а  –изображениемилиизображением по Лапласу. Символическая запись такого преобразования
–изображениемилиизображением по Лапласу. Символическая запись такого преобразования

где L– оператор преобразования Лапласа.
Функция  , которая подвергается преобразованию Лапласа, обладает следующими свойствами
, которая подвергается преобразованию Лапласа, обладает следующими свойствами
– x(t) определена и дифференцируема на всей положительной числовой полуоси [0,  ];
];
– 
–Существуют такие числа Mи  , что
, что  при
при  t.
t.
Функции, обладающие указанными тремя свойствами, часто называют функциями-оригиналами.
Соотношение
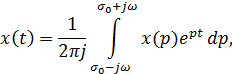
определяющее по известному изображению его оригинал, называют обратным преобразованием Лапласа.
Основные свойства преобразования Лапласа
Линейность преобразования.
Для любых постоянных α и β
 .
.
Дифференцирование оригинала. Если производная x(t) является функцией-оригиналом, т.е.обладает указанными тремя свойствами, то  , где
, где  =
=  ,
,  . Так же, если n-я производная
. Так же, если n-я производная  является функцией-оригиналом, то
является функцией-оригиналом, то
 ,
,
где  , k=0,1,…n-1.
, k=0,1,…n-1.
Если начальные условия нулевые, т.е.  , то последняя формула принимает вид
, то последняя формула принимает вид
 .
.
Таким образом, при нулевых начальных условиях дифференцированию соответствует умножение изображения нар.
Интегрирование оригинала.
Интегрирование оригинала сводится к делению изображения на р
L  .
.
Теорема запаздывания.
Для любого положительного числа τ

Теорема умножения изображения.
Если  и
и  – оригиналы,
– оригиналы,  и
и  – их изображения, то
– их изображения, то

Интеграл правой части равенства называют сверткой функций и и обозначают
Теоремы о предельных значениях.
Если x(t)– оригинал, а x(p)– его изображение, то

Дата добавления: 2018-04-04; просмотров: 456; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!