Разработка структурной схемы АСР. На рис. 3 изображена структурная схема АСР температуры воздуха на выходе из ВУ
На рис. 3 изображена структурная схема АСР температуры воздуха на выходе из ВУ

Рис. 3. Структурная схема АСР температуры воздуха на выходе из ВУ
ОУ - объект управления;
РУ - регулирующее устройство (контроллер);
ИМ - исполнительный механизм;
ОС - операторская станция;
Д - датчик температуры;
Преобразователь
Тт - текущая температура
Тзад.- заданное значение температуры
m, см2 - степень перекрытия проходного сечения.
ПИ-закон регулирования применяется, когда к точности регулирования предъявляются высокие требования. ПИ-закон нужен для того, чтобы убрать статическую ошибку регулирования.
Структурная схема разработана на основе технологической схемы (рис. 3).
Объектом управления является вентиляционная установка, в которой регулируется физическая величина T (температура воздуха). На объект действуют внешние возмущения fiприводящие к изменению регулируемой переменной Т. Регулирование объектом осуществляется путём изменения управляющего сигнала . Регулируемая переменная Т измеряется датчиком обратной связи – Д и преобразуется в нормированный выходной сигнал , который в сравнивающем устройстве сравнивается с нормированным сигналом задания , формируемым ОС, или системой управления вышестоящего уровня. Это: исполнительное устройство (исполнительный двигатель или исполнительный механизм) с регулирующим устройством (клапан, задвижка, заслонка, вентиль и др.); усилитель мощности; модуляторы; демодуляторы; динамические преобразователи (интеграторы, дифференциаторы), формирующие требуемый закон регулирования; нелинейные преобразователи; корректирующие устройства и др. В промышленных системах регулирования различными объектами разными будут регулируемая величина, датчик обратной связи и регулирующее устройство. Все остальные блоки регулятора имеют унифицированные внешние связи и работают с унифицированными сигналами, что позволяет с их помощью реализовывать регуляторы в самых различных промышленных системах регулировани
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 14 |
| КП САиУ-7-648.3 |
|
|
|
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 14 |
| КП САиУ-7-648.3 |
Для того чтобы разработать техническую структуру АСР, нам необходимо самостоятельно выбрать технические средства автоматизации (ТСА).
Обоснование и выбор ТСА
Выбор технических средств осуществлялся по многим критериям:
• соответствие ГОСТу;
• качество;
• надёжность;
• температурные диапазоны работы;
• регулировочный диапазоны работы;
|
|
|
• унифицированный выход сигналов;
• соответствие рабочим средам;
• технологическая совместимость ТС и т.д.
Регулятор АСР должен работать с унифицированным токовым входным сигналом и обеспечивать реализацию ПИ закона регулирования совместно с исполнительным механизмом постоянной скорости. Для этого используется программируемый логический контроллер (ПЛК) КР-500
Контроллеры многофункциональные КР-500, КР-500М (далее контроллеры) предназначены для измерения и измерительного преобразования стандартизованных аналоговых выходных сигналов датчиков в виде напряжения и силы постоянного тока, сигналов термо- пар и термопреобразователей сопротивления, резистивных датчиков; приема и обработки дискретных сигналов; формирования управляющих аналоговых и дискретных сигналов по различным законам регулирования на основе измеренных параметров технологических процессов; передачи по запросу предварительно обработанной информации по каналам связи устройствам верхнего уровня. Контроллеры применяются в составе распределенных и локальных систем управления технологическими процессами, выполнения технологических защит в энергетике, металлургии, химической, нефтехимической и других отраслях промышленности, включая атомные электростанции (контроллер КР-500М)
|
|
|
Таблица 2. Технические характеристики КР-500
| Количество алгоблоков | 99 |
| Количество аналоговых входов для ввода унифицированных токовых сигналов стандартных диапазонов | 16 |
| Количество импульсных выходов для управления электрическим исполнительным механизмом постоянной скорости | 4 |
| Время рабочего цикла | (0,2 ÷ 2)с |
| Количество алгоритмов в библиотеке | 76 |
| Погрешность обработки информации | ± 0,1% |
| Количество независимых контуров регулирования | 4 |
| Вид задания | Внешнее, ручное, программное |
| Питание от сети переменного тока | (220 ± 10) В |
Датчик температуры ОВЕН ДТС035Л-100М.0,5.200.И.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 15 |
| КП САиУ-7-648.3 |
Диапазон пределов измерений температуры воздуха 0-100 С°;
Номинальное значение напряжения питания (постоянного тока) 24 В;
Диапазон допустимых напряжений питания (постоянного тока) 12 – 36 В;
Диапазон выходного тока преобразователя 4 – 20 мА;
Вид зависимости «ток от температуры» линейная;
Нелинейность преобразования, не хуже ±0,2%;
|
|
|
Разрядность цифро-аналогового преобразователя, не менее 12 бит;
Сопротивление каждого провода соединяющего преобразователь с термометром сопротивления, Ом, не более 30;
Сопротивление линии связи с термоэлектрическим преобразователем, Ом, не более 100;
Номинальное значение сопротивления нагрузки
(при напряжении питания 24 В) 250 Ом ±5 %;
Максимальное допустимое сопротивление нагрузки
(при напряжении питания 36 В) 1200 Ом;
Пульсации выходного сигнала 0,6%;
Время установления рабочего режима для преобразователя (предварительный прогрев) после включения напряжения питания, не более 30 мин;
Показатель тепловой инерции, не более 20...40 с;
Межповерочный интервал датчика составляет 2 года;
Гарантийный срок эксплуатации – 24 месяца со дня ввода в эксплуатацию.
Трёхходовой линейный регулирующий клапан ГРАНРЕГ® KM317Ф
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 15 |
| КП САиУ-7-648.3 |
Присоединение фланцы DN 15 – 300 мм
Условное давление PN 1,6 Мпа
Рабочая температура -29...+230 °С
Величина Kvs; КМ317Ф: 40 м3/ч
Тип электропривода PSL
Линейный электропривод PSL
Технические характеристики
Тип PSL204;
Усилие, (кН) 4,5 ;
Потребляемая мощность, (Вт) 44;
Ход штока, (мм) 50;
Скорость, (мм/сек) 0,5;
Питающее напряжение Переменный ток 50 Гц: 220 В, 24 В, 24 В DC; Постоянный ток: 400 В;
Управляющий сигнал Трёхпозиционный, аналоговый (4-20 мА, 2-10 В) ;
Класс защиты IP65 ;
Рабочая температура -20..+80 °C;
Масса, (кг) 5,54.
Блок ручного управления
Устройство-блок для ручного управления предназначено для использования в рамках систем автоматизации производственных процессов, в разных отраслях промышленности в качестве устройства для управления импульсными исполнительными устройствами. Устройство обладает гальванической изоляцией питания и входных и выходных цепей.
Технические характеристики приведены в таблице 3.
| Входной импульсный сигнал | 0-5 мА, 0(4)-20 мА , 0-10 В |
| Основная приведенная погрешность измерения | ≤0,2 % |
| Количество разрядов цифрового индикатора | 4 |
| Температура окружающей среды | -40 °С - +70 °С |
| Напряжение питания | ~(220±22) В, (50±1) Гц, 24(±4) В |
| Потребляемая мощность | не более 6 Вт |
| Корпус (ВxШxГ) | щитовой 96x96x189 мм |
| Масса блока | не более 0.5 кг |
4.2 Разработка и описание технической структуры АСР
В соответствии с выбранными ТСА составлена техническая структура АСР, приведеннаяв Приложении 2.
Задание величины регулируемого параметра АСР будет производиться с операторной станции (ОС).
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 18 |
| КП САиУ-7-648.3 |
Назначение ОС – связать оператора с объектом и со средствами АСР, поэтому ОС оснащаются развитыми средствами вывода информации, которые одновременно позволяют воспринимать управляющее воздействие, исходящее от оператора. Главное средство представления информации оператору это экран дисплея. Информация на экране дисплея представлена в форме видеограмм, отображающих состояние технологического процесса.
В состав операторской станции входит:
Персональный компьютер промышленного исполнения на базе Windows 98;
Программная оболочка для визуализации работы системы (InTouch 9.5);
Программа организации человеко-машинного интерфейса под оболочку InTouch.
Температура на выходе вентиляционной установки измеряются и преобразуются датчиком температуры ОВЕН ДТС035Л-100М.0,5.200.И в унифицированный токовый сигналы 0-5 мА, и с его выходов сигналы подаются через вторичный прибор на входы контроллера КР-500М, он же воздействует на положение трёхходового линейного регулирующего клапана ГРАНРЕГ® KM317Ф с линейным электроприводом PSL.
В Приложении 1 приведена спецификация используемых ТСА.
Выбор структуры регулятора
Существуют
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 19 |
| КП САиУ-7-648.3 |
СК «Регулятор аналоговый РЕГА» предназначена для построения контура регулирования с аналоговым выходным сигналом, а СК «Регулятор импульсный РЕГИ» - с импульсным выходным сигналом.
Так как в АСР уровня воды в котле используются электропозиционер, ЭИМ (поворотный) и должен выполняться ПИ закон регулирования, выбрана СК «Регулятор «Регулятор импульсный РЕГИ» (в дальнейшем РЕГИ). На рис. 4. изображена структура такого регулятора.
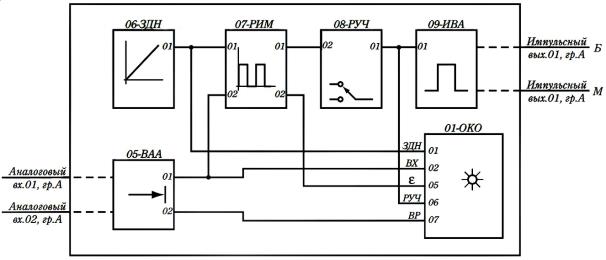
Рис. 4. Стандартная конфигурация «Регулятор импульсный РЕГИ».
Таблица 8. Состав стандартной конфигурации «Регулятор импульсный РЕГИ».
| № алгоблока | Наименование алгоритма |
| 01 | Оперативный контроль контуров регулирования ОКО |
| 02 | – 00 |
| 03 | – 00 |
| 04 | – 00 |
| 05 | Ввод аналоговый, группа А, ВАА |
| 06 | ЗаданиеЗДН |
| 07 | Регулирование импульсное РИМ |
| 08 | Ручное управление РУЧ |
| 09 | Импульсный вывод, группа А, ИВА |
Регулятор помимо алгоритма регулирования содержит ручной зада
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 20 |
| КП САиУ-7-648.3 |
РЕГИ помещается только в первый контур. Остальные три контура (алгоблоки 02-04) оставлены свободными. При необходимости в них могут быть добавлены нужные алгоритмы.
РЕГИ обеспечивает не только функции регулирования, но также и функции оперативного управления в первом контуре, а именно ручное изменение сигнала задания, переход на ручной режим и ручное изменение выхода, контроль входного сигнала (регулируемого параметра), и сигнал рассогласования, а также контроль сигнала задания и выходного сигнала.
После ввода РЕГИ конфигурация может видоизменятся и дополняться другими алгоритмами, в ней может изменяться конфигурация и параметры настройки в соответствии со стандартными правилами программирования.
Конфигурирование контроллера
В соответствии с выбранной структурой регулятора опишем принцип действия алгоритмов, указанных в таблице 9 (п. 5).
· ОКО – оперативный контроль регулирования. [8]
Алгоритм применяется в том случае, если оперативное управление контуром
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 21 |
| КП САиУ-7-648.3 |
Функциональная схема алгоритма ОКО изображена на рис. 5.[11]

Рис. 5. Функциональная схема алгоритма «Оперативный контроль регулирования ОКО».
Алгоритм позволяет с помощью клавиш лицевой панели изменять режим управления, режим задания, управлять программнымзадатчиком, изменять выходной сигнал регулятора (в режиме ручного задатчика), а также контролировать сигналы задания и рассогласования, входной и выходной сигналы, параметры программ (при программном регулировании) и т.п.
Как правило, алгоритм ОКО применяется в сочетании с алгоритмами ЗДН, ЗДЛ, РУЧ, РАН, РИМ.
Алгоритм ОКО имеет от 10 до 15 входов. В зависимости от вида регулятора. Выходов он не имеет.
Путем конфигурирован
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 22 |
| КП САиУ-7-648.3 |
Обозначение и назначение входов приведены в таблице 9.[10]
Таблица 9. Входы алгоритма ОКО.
| Входы | Назначение | |
| № | Обозначение | |
| 1 | Xздн | Сигнал задания |
| 2 | Xвх | Входной сигнал (регулируемый параметр) |
| 3 | W0 | 0% в технических единицах |
| 4 | W100 | 100% в технических единицах |
| 5 | Xε | Сигнал рассогласования |
| 6 | Xруч | Сигнал ручного управления |
| 7 | Хвр | Выходной сигнал регулятора |
| 8 | Z | Любой выбранный сигнал |
| 9 | Nz | Тип сигнала на входе Z |
| 10 | Nок | Ошибка контура |
| 11 | Хздл | Сигнал задания ведомого регулятора в локальной системе |
| 12 | Хвх.л | Входной сигнал (регулируемы параметр) ведомого регулятора в локальном режиме |
| 13 | W0.л | 0% в технических единицах для ведомого регулятора в локальном режиме |
| 14 | W100.л | 100% в технических единицах для ведомого регулятора в локальном режиме |
| 15 | Xε.л | Сигнал рассогласования ведомого регулятора в локальном режиме |
Таким образом, с помощью алгоритма ОКО назначаются функции и сигналы оперативного управления контуром регулирования. Алгоритм определяет, какие сигналы будут выведены на индикаторы лицевой панели и в каких технических ед
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 23 |
| КП САиУ-7-648.3 |
· ВАА – ввод аналоговой группы А. [8]
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогового ввода (с АЦП). Алгоритм обслуживает до 8 аналоговых входов.
Помимо связи с АЦП алгоритм ВАА позволяет корректировать диапазон входного аналогового сигнала в двух точках, соответствующих 0% и 100% диапазона.
Алгоритм содержит несколько идентичных независимых каналов, которое задается модификатором. Каждый канал связан с соответствующим (по номеру) аналоговым входом контроллера. Эта связь образуется «автоматически», как только алгоритм ВАА вводится в один из алгоблоков контроллера. К входному аналоговому сигналу добавляется сигнал смещения Хсм, полученная сумма умножается на коэффициент Км. Эти операции позволяют компенсировать смещение нуля и диапазона как АЦП, так и датчика, подключенного к контроллеру.
Функциональная схема алгоритма ВАА изображена на рис. 6.

Рис. 6. Функциональная схема алгоритма «Вход аналоговый ВАА».
Обозн
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 24 |
| КП САиУ-7-648.3 |
Таблица 10. Входы-выходы алгоритма ВАА.
| Входы | Назначение | ||
| № | Обозначение | Вид | |
| 01 | Хсм.1 |
Входы | Смещение канала 1 |
| 02 | Хм.1 | Диапазон канала 1 | |
| 03 | Хсм.2 | Смещение канала 2 | |
| 04 | Хм.2 | Диапазон канала 2 | |
| … | … | … | |
| 2m-1 | Хсм.m | Смещение канала m | |
| m+1 | Хм.m | Диапазон канала m | |
| 01 | Y1 |
Выходы | Выход канала 1 |
| 02 | Y2 | Выход канала 2 | |
| … | … | … | |
| m | Ym | Выход канала m | |
ИВА – импульсный вывод группы А. [8]
Алгоритм применяется, когда контроллер должен управлять ИМ постоянной скорости. Алгоритм преобразует сигнал, сформированный алгоблоками контроллера (в частности, алгоритмом импульсного регулирования), в последовательности импульсов переменной скважности. Алгоритм ИВА выдает последовательность указанных импульсов на средства дискретного выхода контроллера.
Функциональная схема алгоритма ИВА приведена на рис. 7.

Рис. 7. Функциональная схема алгоритма «Импульсный вывод ИВА».
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 25 |
| КП САиУ-7-648.3 |
Алгоритм содержит несколько каналов связи с выходами контроллера, число которых задается модификатором.
Каждый канал алгоритма ИВА содержит широтно-импульсный модулятор (ШИМ), преобразующий входной сигнал в последовательность импульсов со скважностью Q, пропорциональный входному сигналу. Параметр Т задает минимальную длительность выходных импульсов. Параметр N определяет, к какому контору регулирования относится данный канал алгоритма ИВА.
Обозначение и назначение входов алгоритма ИВА приведены в таблице 11.[12]
Таблица 11. Входы алгоритма ИВА. [8]
| Входы | Назначение | |
| № | Обозначение | |
| 01 | Х1 | Сигнал 1-го выхода |
| 02 | Т1 | Длительность импульса 1-го выхода |
| 03 | N1 | Номер контура, с которым связан 1-й выход |
| 04 | Х2 | Сигнал 2-го выхода |
| 05 | Т2 | Длительность импульса 2-го выхода |
| 06 | N2 | Номер контура, с которым связан 2-й выход |
| 07 | Х3 | Сигнал 3-го выхода |
| 08 | Т3 | Длительность импульса 3-го выхода |
| 09 | N3 | Номер контура, с которым связан 3-й выход |
| 10 | Х4 | Сигнал 4-го выхода |
| 11 | Т4 | Длительность импульса 4-го выхода |
| 12 | N4 | Номер контура, с которым связан 4-й выход |
· РИМ
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 26 |
| КП САиУ-7-648.3 |
Алгоритм используется при построении ПИД и ПИ регулятора, работающего в комплекте сИМ постоянной скорости. Алгоритм, как правило, применяется в сочетании с алгоритмом импульсного вывода ИВА, который преобразует выходной аналоговый сигнал алгоритма РИМ в последовательность импульсов, управляющих ИМ. Помимо формирования закона регулирования в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона нечувствительности. Алгоритм содержит узел настройки, позволяющей автоматизировать процесс настройки регулятора.
Функциональная схема алгоритма содержит несколько звеньев и изображена на рис. 8.

Рис. 8. Функциональная схема алгоритма «Регулирование импульсное РИМ».
Звено, выделяющее сигнал рассогласования, суммирует два выходных сигнала, при этом один из них масштабируется, инвертируется и фильтруется.
Зона нечувствительности не пропускает на свой выход сигналы, значения которых
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 27 |
| КП САиУ-7-648.3 |
Алгоритм содержит узел настройки, систоящий из переключателя режима «работа-настройка», нуль-органа и дополнительного фильтра с постоянной времени.
Обозначение и назначение входов-выходов алгоритма приведены в таблице 12.
Таблица 12. Входы-выходы РИМ.[13]
| Входы | Назначение | ||
| № | Обозначение | Вид | |
| 01 | Х1 |
Входы | Немасштабируемый вход (каскадный) |
| 02 | Х2 | Масштабируемый вход | |
| 03 | КМ | Масштабный коэффициент | |
| 04 | Тф | Постоянная времени фильтра | |
| 05 | ХΔ | Зона нечувствительности | |
| 06 | КП | Коэффициент пропорциональности | |
| 07 | ТИ | Постоянная времени интегрирования | |
| 08 | КД | Коэффициент дифференцирования | |
| 09 | ТМ | Время исполнительного механизма | |
| 10 | - | Не используется | |
| 11 | Снас | Команда перехода в режим настройки | |
| 12 | ХНО | Уровень сигнала на выходе нуль-органа | |
| 13 | Кi | Коэффициент, устанавливаемый в зависимости от свойств объекта | |
| 01 | Y | Выходы | Основной выход алгоритма (каскадный) |
| 02 | Yε | Сигнал рассогласования | |
· ЗДН – задание. [8]
Алгоритм применяется для формирования сигнала ручного задания в контуре регулирования. Через этот алгоритм к регулятору подключаются также программные задатчики и сигнал внешнего задания.
Алгоритм применяется в сочетании с алгоритмом ОКО.
Содержит узел ручного задания, узел динамической балансировки, переключатель вида задания и переключатель программ.
Алгоритм имеет модификатор, который определяет число независимых прогр
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 28 |
| КП САиУ-7-648.3 |
С помощью переключателя вида задания выбирается один и трех видов задания: ручное задание («РЗ»), программное задание («ПЗ») или внешнее задание («ВЗ»).
В режиме ручного задания сигнал задания изменяется вручную. В режиме программного задания сигнал задания поступает через соответствующий вход Хпр, i(обычно к этим входам подключаются программные задатчики). В режиме внешнего задания сигнал задания поступает с входа Хвн.
Алгоритм ЗДН содержит встроенный механизм статической и динамической балансировки.
Функциональная схема алгоритма ЗДН изображена на рис. 9.

Рис. 9. Функциональная схема алгоритма «Задание ЗДН».
Алго
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 29 |
| КП САиУ-7-648.3 |
Обозначение и назначение входов-выходов алгоритма приведены в таблице 13.
Таблица 13. Входы-выходы алгоритма ЗДН.
| Входы | Назначение | ||
| № | Обозначение | Вид | |
| 01 | Ссб |
Входы | Включение статической балансировки |
| 02 | СДБ | Включение динамической балансировки | |
| 03 | VДБ | Скорость динамической балансировки | |
| 04 | Хвн | Сигнал внешнего задания | |
| 05 | ХПР.1 | Вход для 1-го программногозадатчика | |
| 06 | ХПР.2 | Вход для 2-го программногозадатчика | |
| … | … | … | |
| m | ХПР.m | Вход для m-го программногозадатчика | |
| 01 | YЗДН |
Выходы | Основной выход (каскадный) |
| 02 | Dруз | Режим ручного задания | |
| 03 | Dвнш | Режим внешнего задания | |
| 04 | Dпрг |
Выходы | Режим программного задания |
| 05 | NП | Номер текущей программы | |
| 06 | Nуч | Номер текущего участка | |
| 07 | ТП | Время, оставшееся до окончания текущего участка | |
| 08 | Dкпв | Конец очередного повторения программы | |
| 09 | Nост | Оставшееся число повторений | |
| 10 | Dпс | Программа в состоянии «пуск» | |
| 11 | Dст | Программа в состоянии «стоп» | |
| 12 | Dсбр | Программа в состоянии «сброс» | |
| 13 | Dкп | Конец программы | |
· РУЧ – ручное управление. [8]
Алгоритм предназначен для изменения режимов управления регулятора. С его помощью регулятор переключается в дистанционный или ручной режим работы. В ручном режиме выходной сигнал изменяется вручную. Алгоритм РУЧ применяется в составе как аналогового, так и импульсивного регулятора и используется в сочетании с алгоритмом ОКО. Алгори
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 30 |
| КП САиУ-7-648.3 |
Функциональная схема алгоритма РУЧ изображена на рис. 10.

Рис. 10. Функциональная схема алгоритма «Ручное управление РУЧ».
Если на лицевой панели контроллера нажимается клавиша ручного режима, к выходу алгоритма РУЧ подключается узел ручного управления. Если в алгоритме ОКО, связанным с данным алгоритмом РУЧ, задан импульсный регулятор, то узел ручного управления формирует константу, определяющую среднюю скорость перемещения ИМ.
Если на лицевой панели контроллера нажимается клавиша автоматического режима управления, узел ручного управления отключается.
Обозначение и назначение входов-выходов алгоритма приведены в таблице 14. [10]
Таблица 14. Входы-выходы алгоритма РУЧ
| Входы | Назначение | |||
| № | Обозначение | Вид | ||
| 01 | Сруч |
Входы | Переход на ручной режим | |
| 02 | Х(к) | Сигнал локального или каскадного регулятора (каскадный) | ||
| 03 | ХДСТ(к) | Сигнал дистанционного управления (каскадный) | ||
| 01 | Y(к) |
Выходы | Основной выход (каскадный) | |
| 02 | Dруч | Ручной режим | ||
| 03 | Dдст | Дистанционный режим | ||
Дата добавления: 2018-02-28; просмотров: 3085; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!