ЗАДАЧИ К КОНТРОЛЬНЫМ ЗАДАНИЯМ
Nbsp;
СОДЕРЖАНИЕ ЗАДАНИЙ, ВЫБОР ВАРИАНТОВ,
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТ,
ПОЯСНЕНИЯ К ТЕКСТУ ЗАДАЧ
К каждой задаче дается 10 рисунков и таблица (с тем же номером, что и задача), содержащая дополнительные к тексту задачи условия. Нумерация рисунков двойная, при этом номером рисунка является цифра, стоящая после точки. Например, рис. С1.4 это рис. 4 к задаче С1 и т. д. (в тексте задачи при повторных ссылках на рисунок пишется просто рис. 4 и т.д.). Номера условий от 0 до 9 проставлены в 1-м столбце (или в 1-й строке) таблицы.
Студент во всех задачах выбирает номер рисунка по предпоследней цифре шифра, а номер условия в таблице—по последней; например, если шифр оканчивается числом 46, то берутся рис. 4 и условия № 6 из таблицы.
Каждое задание выполняется в отдельной тетради (ученической), страницы которой нумеруются. На обложке указываются: название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет, специальность и адрес. На первой странице тетради записываются: номер работы, номера решаемых задач и год издания контрольных заданий.
Решение каждой задачи обязательно начинать на развороте тетради (на четной странице, начиная со второй, иначе работу трудно проверять). Сверху указывается номер задачи, далее делается чертеж (можно карандашом) и записывается, что в задаче дано и что требуется определить (текст задачи не переписывать). Чертеж выполняется с учетом условий решаемого варианта задачи; на нем все углы, действующие силы, число тел и их расположение на чертеже должны соответствовать этим условиям. В результате _в целом ряде задач чертеж получается более простой, чем общий.Чертеж должен быть аккуратным и наглядным, а его размеры должны позволять ясно показать все силы или векторы скорости и ускорения и др.; показывать все эти векторы и координатные оси на чертеже, а также указывать единицы получаемых величин нужно обязательно. Решение задач необходимо сопровождать краткими пояснениями (какие формулы или теоремы применяются, откуда получаются те или иные результаты и т.п.) и подробно излагать весь ход расчетов. На каждой странице следует оставлять поля для замечаний рецензента.
|
|
|
Работы, не отвечающие всем перечисленным требованиям, проверяться не будут, а будут возвращаться для переделки.
К работе, высылаемой на повторную проверку (если она вы полнена в другой тетради), должна обязательно прилагаться незачтенная работа
На экзамене необходимо представить зачтенные по данном) разделу курса работы, в которых все отмеченные рецензентом погрешности должны быть исправлены.
При чтении текста каждой задачи учесть следующее, Большинство рисунков дано без соблюдения масштаба. На рисунках к задачам С1— С5 и Д1—Д12 все линии, параллельные строкам, счи-таются горизонтальными, а перпендикулярные строкам - вертикальными
|
|
|
| 3 |
и это в тексте задач специально не оговаривается. Также без оговорок считается, что все нити (веревки, тросы) являются нерастяжимыми и невесомыми, нити, перекинутые через блок, по блоку не скользят, катки и колеса (в кинематике и динамике) катятся по плоскостям без скольжения. Все связи, если не сделано других оговорок, считаются идеальными.
Когда тела на рисунке пронумерованы, то в тексте задач и в таблице Р1,11, r1 и т. п. означают вес или размеры тела 1; Р2, 12, r2 — тела 2 и т. д. Аналогично в кинематике и динамике VB, aB означают скорость и ускорение точки В; Vс, ас — точки С; ω1, ε1 — угловую скорость и угловое ускорение тела 1; ω2, ε2—тела 2 и т. д. В каждой задаче подобные обозначения могут тоже специально не оговариваться.
Следует также иметь в виду, что некоторые из заданных в условиях задачи величин (размеров) при решении каких-нибудь вариантов могут не понадобиться, они нужны для решения других вариантов задачи.
|
|
|
Из всех пояснений в тексте задачи обращайте внимание только на относящиеся к вашему варианту, т. е. номеру вашего рисунка или вашего условия в таблице.
Методические указания по решению задач, входящих в контрольные задания, даются для каждой задачи после ее текста под рубрикой «Указания»; затем дается пример решения аналогичной задачи. Цель примера—разъяснить ход решения, но не воспроизвести его полностью. Поэтому в ряде случаев промежуточные расчеты опускаются. Но при выполнении задания все преобразования и числовые расчеты должны быть обязательно последовательно проделаны с необходимыми пояснениями; в конце должны быть даны ответы.
ЗАДАЧИ К КОНТРОЛЬНЫМ ЗАДАНИЯМ
СТАТИКА
Задача С1
Жесткая рама (рис. С1. 0—С1.9, табл. С1) закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню с шарнирами на концах, или к шарнирной опоре на катках.
В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом Р=25 кН. На раму действует пара сил с моментом М=60 кН-м и две силы, значения, направления и точки приложения которых указаны в таблице (например, в условиях № 1 на раму действуют сила F2 под углом 15° к горизонтальной оси, приложенная в точке D, и сила F3 под углом 60° к горизонтальной оси, приложенная в точке Е и т.д.).Определить реакции связей в точках А, В, вызываемые действующими нагрузками. При окончательных расчетах принять а=0,5 м.
|
|
|
Указания. Задача С1 - на равновесие тела под действием произволь- ной плоской системы сил. При ее решении учесть, что натяжения обе- их ветвей нити, перекинутой через блок, когда трением пренебрегают,
| 4 |
| Таблица С1 |
связей. При вычислении момента силы F часто удобно разложить
ее на составляющие F' и F", для которых плечи легко определяют-
ся, и воспользоваться теоремой Вариньона; тогда mo( F ) = mo( F' ) +
+ mo( F" ).
| 5 |
| Рис.С1.0 |
| Рис.С1.1 |


| Рис.С1.8 |
| Рис.С.1.4 |
| Рис.С1.7 |
| Рис.С1.4 |
| Рис.С1.2 |
| Рис.С1.6 |
| 6 |

| Рис.С1.2.2 |
| Рис.1.4 |
| Рис.1.6 |
| Рис.С1.9 |
| Рис.С1.5 |
| Рис.1.7 |
| Рис.1.5 |
| Рис.С1.3 |
| Рис.С.1.3 |
Задача С2
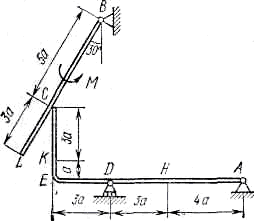
Конструкция состоит из жесткого угольника и стержня, которые в точке С или соединены друг с другом шарнирно (рис.С2.0-С2.5),или свободно опираются друг о друга (рис С2.6-С2.9).Внешними связями,наложенными на конструкцию, являются в точке А или шарнир, или жесткая заделка; в точке В или невесомый стержень ВВ(рис.0 и1),или гладкая плоскость (рис.2 и 3),или шарнир (рис.4-9); в точке D или невесомый стержень DD (рис.1,2,7), или шарнирная опора на катках (рис. 9).
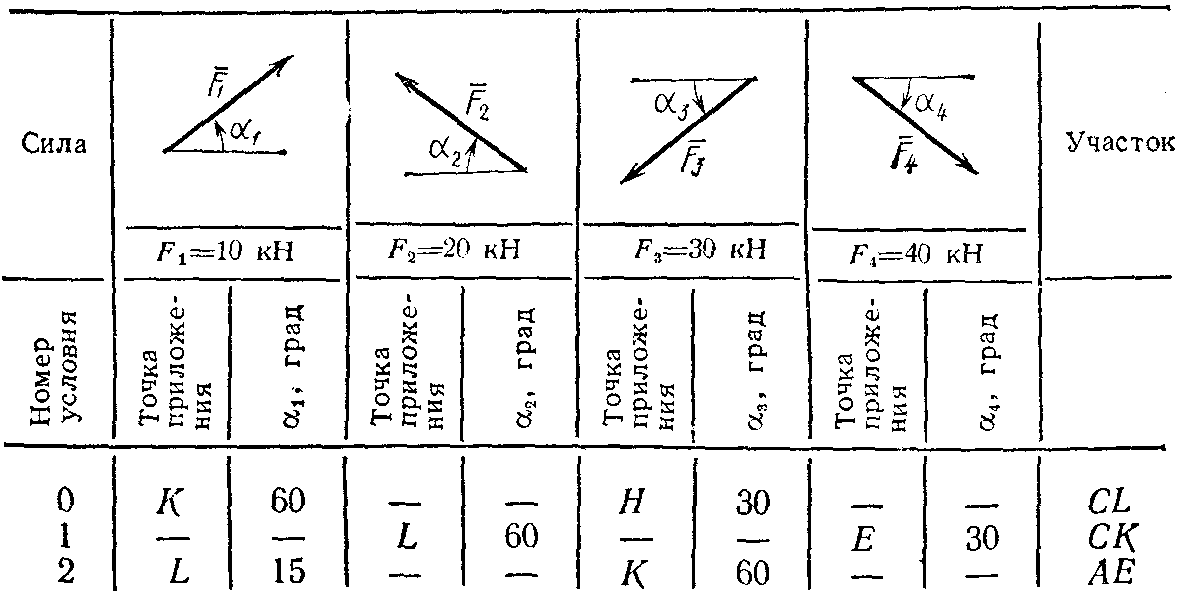
На каждую конструкцию действуют: пара сил с моментом М — = 60 кН·м, равномерно распределенная нагрузка интенсивности q= =20 кН/м и еще две силы. Эти силы, их направления и точки приложения указаны в табл. С2; там же в столбце «Участок» указано, на каком участке действует распределенная нагрузка (например, в условиях № 1 на конструкцию действуют сила F2 под углом 60° к горизонтальной оси, приложенная в точке L, сила F4 под углом 30° к горизонтальной оси, приложенная в точке Е, и нагрузка, распределенная на участке СК.
Определить реакции связей в точках А, В, С (для рис. 1,2,7,9, еще и в точке D), вызванные заданными нагрузками. При окончательных расчетах принять а=0,2 м. Направление распределенной нагрузки на различных по расположению участках указано в табл. С2а.
Указания. Задача С2—на равновесие системы тел, находящихся под действием плоской системы сил. При ее решении можно или: рассмотреть сначала равновесие всей системы в целом, а затем— равновесие одного из тел системы, изобразив его отдельно, или же сразу расчленить систему и рассмотреть равновесие каждого из тел в отдельности, учтя при этом закон о равенстве действия и противо-действия. В задачах, где имеется жесткая заделка, учесть, что ее реакция представляется силой, модуль и направление которой неиз-вестны, и парой сил, момент которой тоже неизвестен.
Таблица С2
| 7 |
| 1 2 3 4 5 6 7 8 9 10 |
| 1 2 3 4 5 6 7 8 9 10 |
| Окончание табл.С2 |

| Рис. С2.3 |
| Рис. С2.2 |
| Рис. С2.1 |

| Рис. С2.0 |
|

|
| 8 |
|
|
|
|
| 9 |
Задача С5
Две однородные прямоугольные тонкие плиты жестко соединены (сва
рены) под прямым углом друг к другу и закреплены сферическим шарни- ром (или подпятником) в точке А, цилиндрическим шарниром (подшипни- ком) в точке В и невесомым стержнем / (рис. С5.0—С5.7) или же двумя подшипниками в точках А и В и двумя невесомыми стержнями 1 и 2 (рис. С5.8, С5.9); все стержни прикреплены к плитам и к неподвижным опо- рам шарнирами.
Размеры плит указаны на рисунках; вес большей плиты P1 = 5 кН, вес меньшей плиты Р2=3 кН. Каждая из плит расположена параллельно одной из координатных плоскостей (плоскость ху горизонтальная).На пли- ты действуют пара сил с моментом М=4 кН-м, лежащая в плоскости од- ной из плит, и две силы. Значения этих сил, их направления и точки при- ложения указаны в табл. С5; при этом силы F1 и F4 лежат в плоскостях, параллельных плоскости ху, сила F2— в плоскости, параллельной ху, и сила F3 в плоскости, параллельной уz. Точки приложения сил (D, Е, Н, К) находятся в углах или в серединах сторон плит.
. Определить реакции связей в точках А и В и реакцию стержня (стерж- ней). При подсчетах принять а= 0,6 м
Указания. Задача С5 — на равновесие тела под действием произволь--ной пространственной системы сил. При ее решении учесть, что реакция сферического шарнира (подпятника) имеет три составляющие (по всем трем координатным осям), а реакция цилиндрического шарнира (подшип- ника)—две составляющие, лежащие в плоскости, перпендикулярной оси шарнира (подшипника). При вычислении момента силы Fчасто удобно разложить ее на две составляющие F' и F", параллельные координатным осям - (или на три); тогда, по теореме Вариньона,
mx( F )=mx( F' )+mx( F" ) и т.д.
| 1 2 3 4 5 6 7 8 9 |

| 10 |
| Окончание табл.С5 |

| 1 2 3 4 5 6 7 8 9 |
| 11 |
| Рис.С5.5 |
| Рис.С5.4 |
| Рис.С5.2 |
| РисС5.3 |
| Рис.С5.0 |
| Рис.С5.1 |
|

|
КИНЕМАТИКА
Задача К1
Точка В движется в плоскости ху (рис. К 1.0—К 1.9, табл. К1; траектория точки на рисунках показана условно). Закон движения точки задан уравнениями x=f1(t), y= f2(t), где х и у выражены в сантиметрах, t — в секундах.
Найти уравнение траектории точки; для момента времени t1 = = 1 с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Зависимость x=f1(t) указана непосредственно на рисунках, а зависимость у=f2(t) дана в табл. К1 (для рис. 0—2 в столбце 2, для рис. 3—6 в столбце 3, для рис. 7—9 в столбце 4). Как и в задачах С1— С5, номер рисунка выбирается по предпоследней цифре шифра, а номер условия в табл. К1 —по последней.
Указания. Задача К1 относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное и нормальное ускорения точки.
В данной задаче все искомые величины нужно определить только для момента времени t1 = 1 с. В некоторых вариантах задачи при определении траектории или при последующих расчетах (для их упрощения) следует учесть известные из тригонометрии формулы: cos 2α=1—2 sin2 α = 2 cos2 α —1; sin2α =2 sinα cosα.
|

|
Таблица К1
| Окончание табл.К1 |

|
| 9 |
| 9 |
| 9 |

| 1 2 3 4 |
|

Рис. К1.7 Рис. К1.8 Рис. К1.9
Задача К2
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес
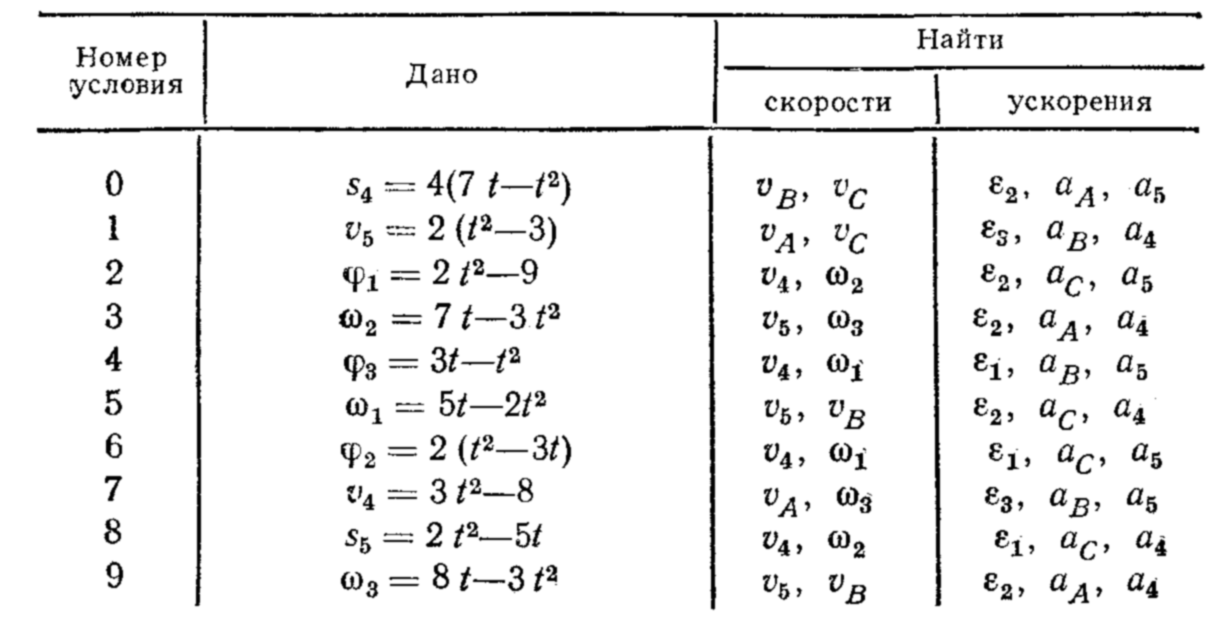
(рис. К2.0—К2.9, табл. К2). Радиусы ступеней колес равны соот-ветственно: у колеса 1-r1=2 см, R1=4 см, у колеса 2-r2=6 см, R2=8 см, у колеса 3-r3=12 см, R3=16 см. На ободьях колес расположены точки А, В,С. В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t)— закон вращения колеса 1, S4(t)—закон движения рейки 4, ω2(t)—закон изменения угловой скорости колеса 2, V5(t) - закон изменения скорости груза 5и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω) против хода часовой стрелки, для S4, S5и V4, V5 — вниз.
Определить в момент времени t1=2 с указанные в таблице в столбцах «Найти» скорости (v— линейные, со ω —угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (V5 — скорость груза 5 и т. д.).
Указания. Задача К2 — на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что когда два колеса находятся в зацеплении, скорость точки зацепления каждого колеса одна и та же, а когда два колеса связаны ременной передачей, то скорости всех точек ремня и, следовательно, точек, лежащих на ободе каждого из этих колес, в данный момент времени численно одинаковы; при этом считается, что ремень по ободу колеса не скользит.
Таблица К2
| 15 |


| Рис.К2.0 Рис.К2.1 |
| Рис.К2.6 Рис.К2.7 |
| Рис.К2.2 Рис.К2.3 |
| Рис.К2.8 Рис.К2.9 |
| 16 |
| Рис.К2.4 Рис.К2.5 |
Задача КЗ
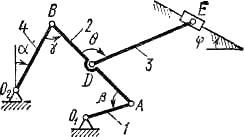
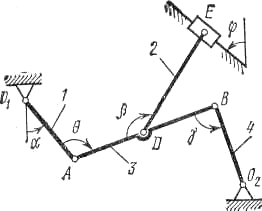
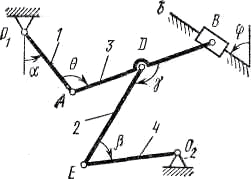
Плоский механизм состоит из стержней /, 2, 3,4 и ползуна В или Е (рис. КЗ.О—КЗ.7) или из стержней 1, 2, 3 и ползунов В и Е (рис. К3.8, К3.9), соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня АВ. Длины стержней равны соответственно: l1= 0,4 м, l2=1.2 м, l3= 1,4 м, l4=0,6 м. Положение механизма определяется углами α, β, γ, φ, Ө. Значения этих углов и других заданных величин указаны в табл. КЗа (для рис. 0—4) или в табл. КЗб (для рис. 5—9); при этом в табл. КЗа ω1 и ω4 — величины постоянные.Определить величины,указанные в таблицах в столбцах«Найти».
Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например, угол γ на рис. 8 следует отложить от DB по ходу часовой стрелки, а на рис. 9 — против хода часовой стрелки и т. д.).
Построение чертежа начинать со стержня, направление которого определяется углом α; ползун с направляющими для большей наглядности изобразить так, как в примере КЗ (см. рис. КЗ, б).
Заданные угловую скорость и угловое ускорение считать направленными против хода часовой стрелки, а заданные скорость Vbи ускорение  в— от точки В к b (на рис. 5—9).
в— от точки В к b (на рис. 5—9).
Указания. Задача КЗ — на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.
При определении ускорений точек механизма исходить из векторного равенства  , где А — точка, ускорение
, где А — точка, ускорение  которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то
которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то  ); В — точка, ускорение
); В — точка, ускорение  которой нужно определить (если точка В движется по дуге окружности радиуса l, то
которой нужно определить (если точка В движется по дуге окружности радиуса l, то  ,где численно
,где численно  ; входящая сюда скорость
; входящая сюда скорость  определяется так же, как и скорости других точек механизма).
определяется так же, как и скорости других точек механизма).
Таблица КЗа к рис. КЗ.О—К3.4)
| Рис.К3.0 Рис.К3.1 |

| Окончание табл.К3.а |
| 1 2 3 4 5 6 7 8 9 10 11 12 |

| 1 2 3 4 5 6 7 8 9 10 11 12 |
| 17 |
| Рис.К3.2 Рис.К3.3 |


| Таблица К3б (к рис.К3.5-К.3.9) |
| 18 |
| Рис.К3.4 Рис.К3.5 |
| Рис.К3.8 Рис.К3.9 |
| Рис.К3.6 Рис.К3.7 |




| 19 |
Задача К4
Прямоугольная пластина (рис. К4.0—К4.4) или круглая пластина радиуса R=60 см (рис. К4.5—К4.9) вращается вокруг неподвижной оси по закону φ=f1(t), заданному в табл. К4. Положительное направление отсчета угла φ показано на рисунках дуговой стрелкой. На рис. 0, 1, 2, 5, 6 ось вращения перпендикулярна плоскости пластины и проходит через точку О (пластина вращается в своей плоскости); на рис. 3, 4, 7, 8, 9 ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве).По пластине вдоль прямой BD (рис. 0—4) или по окружности радиуса R (рис. 5—9) движется точка М; закон ее относительного движения, т. е. зависимость s=AM=f2(t) (s выражено в сантиметрах, t — в секундах), задан в таблице отдельно для рис. 0—4 и для рис. 5—9; там же даны размеры b и l. На рисунках точка М пока-зана в положении, при котором s=AM>0 (при s<0 точка М находится по другую сторону от точки А).
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени t1=1с.
Указания. Задача К4— на сложное движение точки. Для ее решения воспользоваться теоремами о сложении скоростей и о сложении ускорений. Прежде чем производить все расчеты, следует по условиям задачи определить, где находится точка М на пластине в момент времени t1=1c, и изобразить точку именно в этом положении (а не в произвольном, показанном на рисунках к задаче).В случаях, относящихся к рис. 5—9, при решении задачи не подставлять числового значения R, пока не будут определены положение точки М в момент времени t1 = 1 с и угол между радиусами СМ и СА в этот момент.
| 20 |

| 1 2 3 4 5 6 |
| 1 2 3 4 5 6 |
| Окончание табл.К4а |
| Рис.К4.6 Рис.К4.7 |
| Рис.К4.3 Рис.К4.4 Рис.К4.5 |
| Рис.К4.0 Рис.К4.1 Рис.К4.2 |



| Рис.К4.8 Рис.К4.9 |
| 21 |
ДИНАМИКА
Задача Д1
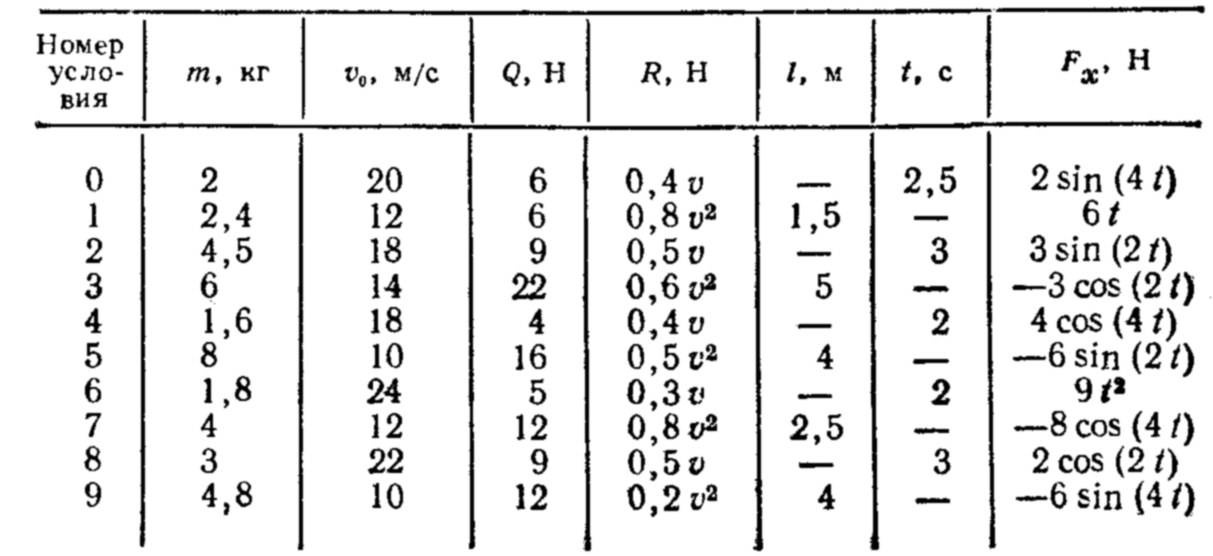
Груз D массой т, получив в точке А начальную скорость Vо, движется в изогнутой трубе ABC, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис. Д1.0—Д1.9, табл. Д1).
На участке АВ на груз кроме силы тяжести действуют постоянная сила Q(ее направление показано на рисунках) и сила сопротивления среды R, зависящая от скорости V груза (направлена против движения); трением груза о трубу на участке АВ пренебречь.
В точке В груз, не изменяя своей скорости, переходит на участок ВС трубы, где на него кроме силы тяжести действуют сила трения (коэффициент трения груза о трубу f=0,2) и переменная сила  , проекция которой Fx на ось х задана в таблице.
, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная расстояние АВ = l или время t1 движения груза от точки A до точки B,найти закон движения груза на участке ВС, т. е. x=f(t), где x=BD.
Указания. Задача Д1—на интегрирование дифференциальных уравнений движения точки (решение основной задачи динамики). Решение задачи разбивается на две части. Сначала нужно составить и проинтегрировать методом разделения переменных дифференциальное уравнение движения точки (груза) на участке АВ, учтя начальные условия. Затем, зная время движения груза на участке АВ или длину этого участка, определить скорость груза в точке В. Эта скорость будет начальной для движения груза на участке ВС. После этого нужно составить и проинтегрировать дифференциальное уравнение движения груза на участке ВС тоже с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая в этот момент t=0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина дучастка, целесообразно перейти к переменному х, учтя, что
| Таблица Д1 |

| 22 |
| Рис.Д1.0 Рис.Д1.1 |
| Рис.Д1.2 Рис.Д1.3 |
| Рис.Д1.4 Рис.Д1.5 |
| Рис.Д 1.6 Рис.Д1.7 |
| Рис.Д1.8 Рис.Д1.9 |

Задача Д2
| 23 |
Задача Д2
Груз 1 массой т укреплен на пружинной подвеске в лифте (рис. Д2.0—Д2.9, табл. Д2). Лифт движется вертикально по закону  (ось
(ось  направлена по вертикали вверх;
направлена по вертикали вверх;  выражено в метрах, t — в секундах). На груз действует сила сопротивления среды
выражено в метрах, t — в секундах). На груз действует сила сопротивления среды  , где v—скорость груза по отношению к лифту.
, где v—скорость груза по отношению к лифту.
Найти закон движения груза по отношению к лифту, т. е. х= f(t); начало координат поместить в положении статического равновесия груза при неподвижном лифте (во избежание ошибок в знаках, направить осьхвсторонуудлинения пружины, а груз изобразить в положении, при котором х>0 и пружина растянута).При подсчетах можно принять g≈10 м/с2. Массой пружин и соединительной планки 2 пренебречь.
В таблице обозначено: c1, c2, c3—коэффициенты жесткости пружин, λо—удлинение пружины с эквивалентной жесткостью в начальный момент времени t=0, V0—начальная скорость груза по отношению к лифту (направлена вертикально вверх). Прочерк в столбцах c1, c2, c3 означает, что соответствующая пружина отсутствует и на чертеже изображаться не должна. Если при этом конец одной из оставшихся пружин окажется свободным, его следует прикрепить в соответствующем месте или к грузу или к потолку (полу) лифта; то же следует сделать, если свободными окажутся соединенные планкой 2 концы обеих оставшихся пружин.
Условие (μ=0 означает, что сила сопротивления R отсутствует,)
Указания.Задача Д2 охватывает одновременно темы: относительное движение и колебания материальной точки. Сначала нужно составить дифференциальное уравнение относительного движения (по отношению к лифту) рассматриваемого в задаче груза, для чего присоединить к действующим силам переносную силу инерции. При этом заменить подвеску одной пружиной с жесткостью, эквивалентной жесткости подвески.Затем проинтегрировать полученное линейное дифференциальное уравнение 2-го порядка, учтя начальные условия.
| 24 |

|
Задача ДЗ
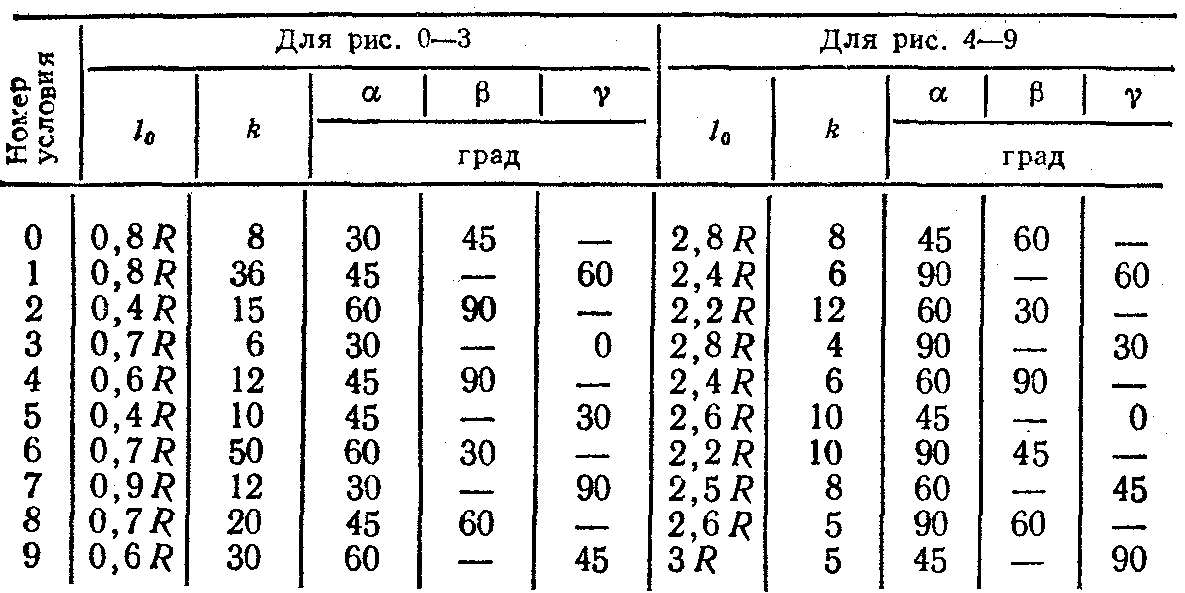
Тонкий гладкий стержень, расположенный в вертикальной плоскости, изогнут так, что состоит из прямолинейного участка и двух дуг окружностей радиуса R=0,5 м, г=0,6R, сопряженных в точке K (рис. ДЗ.О—Д3.9, табл. ДЗ). На стержень нанизан шар весом Р, прикрепленный к пружине с коэффициентом жесткости c=k(P/R)-другой конец пружины закреплен в точке О. Длина пружины в нe-деформированном состоянии равна l0.
Шар начинает двигаться без начальной скорости из положения Во, определяемого углом α(при α=90° считать шар чуть смещенным от равновесного положения в сторону точки В1); достигнув точки В1, указанной на рисунке, шар освобождается от пружины и дальше движется под действием только силы тяжести.
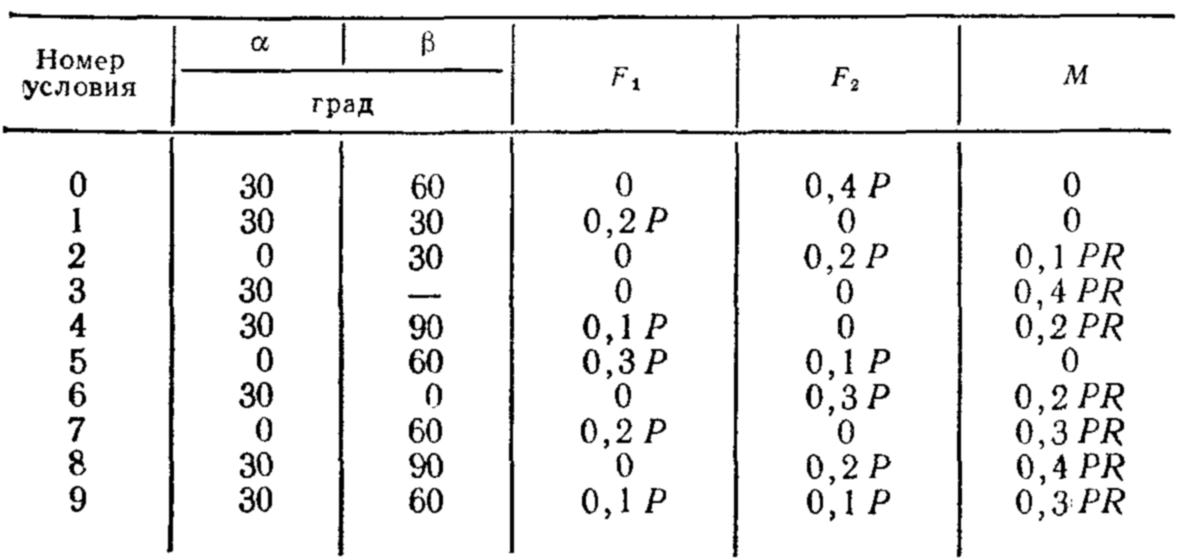
Считая шар материальной точкой, определить, какую скорость он будет иметь, придя в точку D, и с какой силой будет давить на стержень в этой точке (силу давления выразить через вес Р шара). Положение точки D, когда она находится на дуге радиуса R, определяется углом β, а на дуге радиуса г—углом γ. На рис. 2 и 3 В1 произвольная точка дуги ED.
Указания. Задача ДЗ—на применение теоремы об изменении кинетической энергии точки. Решая задачу, учесть, что теорему можно применить сразу на всем перемещении, совершаемом шаром от начального положения до положения, в котором надо определить его скорость. Когда скорость найдена, для определения силы давления шара на стержень изобразить шар в том положении, в котором эту силу надо определить, и составить уравнение движения в проекции на нормаль к траектории, направленную к центру соответствующей окружности, т. е. уравнение mv2/ρ =Fn.
Таблица Д3
| Рис. Д3.1 |
| Рис. Д3.0 |
| 26 |



| Рис.Д3.6 Рис.Д3.7 |

| Рис.Д3.2 Рис.Д3.3 |

Рис.Д3.4 Рис.Д3.5
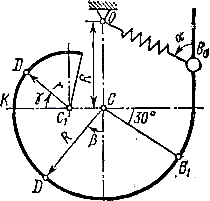
Рис.Д3.8 Рис.Д3.9
| Рис.Д3.8 Рис.Д3.9 |
| 27 |
Задача Д4
Механическая система состоит из грузов 1 и2, ступенчатого шкива 3 с радиусами ступеней R3=0,3 м, r3=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 4 радиуса R4=0,2 м икатка (или подвижного блока) 5 (рис. Д4.0—Д4.9, табл. Д4); тело 5 считать сплошным однородным цилиндром, а массу блока 4—равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f=0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина скоэффициентом жесткости с.Под действием силы F=f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени, когда перемещение s станет равным S1=0,2 м. Искомая величина указана в столбце «Найти» таблицы, где обозначено: V1, V2, V3, Vc5 — скорости грузов 1, 2 и центра масс тела 5 соответственно, ω3 и ω4 - угловые скорости тел 3 и 4.Все катки, включая и катки, обмотанные нитями (как, например, каток 5 на рис. 1), катятся по плоскостям без скольжения.На всех рисунках не изображать груз 2, если m2=0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
| Таблица Д4 |

| 28 |
| 29 |
| Рис.Д4.4 Рис.Д4.5 |

| Рис.Д4.2 Рис.Д4.3 |
| Рис.Д4.0 Рис.Д4.1 |

| Рис.Д4.8 Рис.Д4.9 |
Однородная горизонтальная платформа (круглая радиуса R или прямоугольная со сторонами R и 2R, где R = 1,2 м) массой m1 = =24 кг вращается с угловой скоростью ω0=10 c-1 вокруг вертикальной оси z, отстоящей от центра масс С платформы на расстоянии ОС = b (рис. Д6.0—Д6.9, табл. Д6); размеры для всех прямоугольных платформ показаны на рис. Д6.0, а (вид сверху).
В момент времени t0 = 0 по желобу платформы начинает двигаться (под действием внутренних сил) груз D массой m2 = 8 кг по закону s = AD = F(t), где s выражено в метрах, t — в секундах. Одновременно на платформы, изображенные на рис. О—4, начинает действовать пара сил с моментом М (задан в ньютон-метрах; при М<0 его направление противоположно показанному на рисунках); для платформ, изображенных на рис. 5—9, М = 0.
Определить: для платформ, изображенных на рис. 0—4, зависимость ω = f(t), т. е. угловую скорость платформы, как функцию времени; для платформ, изображенных на рис. 5—9, — угловую скорость ω1 платформы в момент времени t1 = 1 с.
Форма желоба на рис. 0—4 прямолинейная (желоб КЕ), на рис. 5, 6, 7 — окружность радиуса R (обод платформы), на рис. 8, 9 — окружность радиуса r = 0,5 R. На всех рисунках груз D показан в положении, при котором s>0 (когда s<0, груз находитсяпо другую сторону от точки А); на рис. 5—9 расстояние s = AD отсчитывается по дуге окружности. Изображая чертеж решаемой задачи, провести ось z на заданном расстоянии ОС = b от центра С.
Указания. Задача Д6 — на применение теоремы об изменении кинетического момента системы. При применении теоремы к системе, состоящей из платформы и груза, кинетический момент Kz системы относительно оси z определяется как сумма моментов платформы и груза. При этом следует учесть, что абсолютная скорость v груза складывается геометрически из относительной v0T и переносной vпер скоростей, т.е. v = v0T + vпер. Поэтому и количество движения этого груза mv = mvот + mvпер. Тогда можно воспользоваться теоремой Вариньона (статика),согласно которой mz(mv) = mz(mv0T) +mz(mvnep); эти моменты вычисляются так же, как моменты сил
| 30 |
.В случае, когда М=0 и надо определить ωо,необходимо воспользоваться законом сохранения кинетического момента (показав, что он здесь имеет место). При этом следует сначала найти и показать на чертеже положения Do и D1 груза в моменты времени (t0 = 0 и t1 = 1 с (найти, ему равен угол ACD при t0 = 0 и t1 = 1 с), а также определить, чему равна и как направлена скорость v0T в эти моменты времени. После этого, так же как в Д6, надо вычислить Kz, но не для произвольного момента времени, а сначала для момента t0 = 0 (когда груз в положении Do и ω = ω 0), а затем для момента t1 = 1 с (когда груз в положении D1 и ω = ω1) и использовать закон сохранения Kz.
Момент инерции прямоугольной пластины с массой т и сторонами a1и a2 относительно оси Оz, перпендикулярной пластине и проходящей через ее центр масс С, равен -  .При решении задачи полезно изобразить на вспомогательном чертеже вид на платформу сверху (с конца оси z). В качестве примеров это сделано для рис.Д6.0 и Д6.1 (рис.Д6.0а,рис.Д6.1а).
.При решении задачи полезно изобразить на вспомогательном чертеже вид на платформу сверху (с конца оси z). В качестве примеров это сделано для рис.Д6.0 и Д6.1 (рис.Д6.0а,рис.Д6.1а).
 Таблица Д6
Таблица Д6
| 31 |
| Рис.Д6.0 Рис.Д6.0а |
| Рис.Д6.1 Рис.Д6.1а |
| Рис.Д6.2 Рис.Д6.3 |
| 32 |

1 2 3 4 5 6
| Рис.Д6.4 Рис.Д6.5 |
| Рис.Д6.8 Рис.Д6.9 |
| 33 |
| Рис.Д6.6 Рис.Д6.7 |

Задача Д7
Барабан радиуса R весом Р имеет выточку (как у катушки) радиуса г = 0,6 R (рис. Д7.0—Д7.9, табл. Д7). К концам намотанных на барабан нитей приложены постоянные силы F1 и F2, направления которых определяются углом f; кроме сил на барабан действует пара с моментом М. При движении, начинающемся из состояния покоя, барабан катится без скольжения по шероховатой наклонной плоскости с углом наклона а так, как показано на рисунках.
Пренебрегая сопротивлением качению, определить закон движения центра масс С барабана, т. е. XС = f(t), и наименьшее значение коэффициента трения fо плоскость, при котором возможно качение без скольжения. Барабан рассматривать как сплошной однородный цилиндр радиуса R.
Указания.Задача Д7 — на применение дифференциальных уравнений плоскопараллельного движения твердого тела. При составлении уравнений следует во избежание ошибок в знаках направить координатную ось хв ту сторону, куда предполагается направленным движение центра Сбарабана, и считать тогда все моменты положительными, когда они направлены в сторону вращения барабана. Если фактически направление движения центра С другое, то в ответе получится aс<0, но найденная величина ас будет верной. Силу трения, когда неясно, куда она направлена, можно направлять в любую сторону (результат от этого не зависит).
| Таблица Д7 |
| 34 |
| Рис.Д7.0 Рис.Д7.1 Рис.Д7.2 |
| Рис.Д7.6 Рис.Д7.7 |
| Рис.Д7.8 Рис.Д7.9 |
| Рис.Д7.3 Рис.Д7.4 Рис.Д7.5 |




| 35 |
Задача Д8
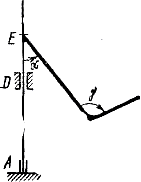
Вертикальный вал АК (рис. Д8.0—Д8.9), вращающийся-с постоянной угловой скоростью ω = 10 с-1, закреплен подпятником в точке Аи цилиндрическим подшипником в точке, указанной в табл. Д8 в столбце 2 (АВ = BD = DE = ЕК = 0,4 м). К валу прикреплен жестко или с помощью шарнира тонкий однородный ломаный стержень массой т = 10 кг, состоящий из частей 1 и 2 ,(на рис. 0—5) или 1, 2 и 3 (на рис. 6—9). Размеры частей стержня показаны на рисунках, где b = 0,1 м, а массы этих частей пропорциональны их длинам.
Определить величины, указанные в таблице в столбце 9, где
обозначение: RB, RE и т.д. — реакция соответствующего подшип-
ника или шарнира, N — реакция невесомого стержня. Весом .вала
пренебречь.
Способ крепления стержня к валу и точка, где он прикреплен, указаны в таблице в столбцах 3 и 4. Когда крепление к валу шарнирное, ломаный стержень удерживается в положении, определяемом углом а, невесомым стержнем 3 (на рис. 0—5) или 4 (на- рис. 6—9), образующим с валом угол φ; при жестком креплении этот невесомый стержень отсутствует (на чертеже не изображать).
На рис. Д8.10 в качестве примера показан вид чертежа в слу-
чае, когда подшипник находится в точке D, а ломаный стержень
прикреплен к валу в точке Ежестко (приварен); невесомый' стер-
жень отсутствует.
Указания.Задача Д8 — на применение к изучению движения системы принципа Даламбера. При решении задачи учесть, что когда силы инерции частиц тела (в данной задаче стержня) имеют равнодействующую  , то численно Rи= тас, где ас — ускорение центра масс С тела, но линия действия силы Rи в общем случае не проходит через точку С).
, то численно Rи= тас, где ас — ускорение центра масс С тела, но линия действия силы Rи в общем случае не проходит через точку С).
| 36 |
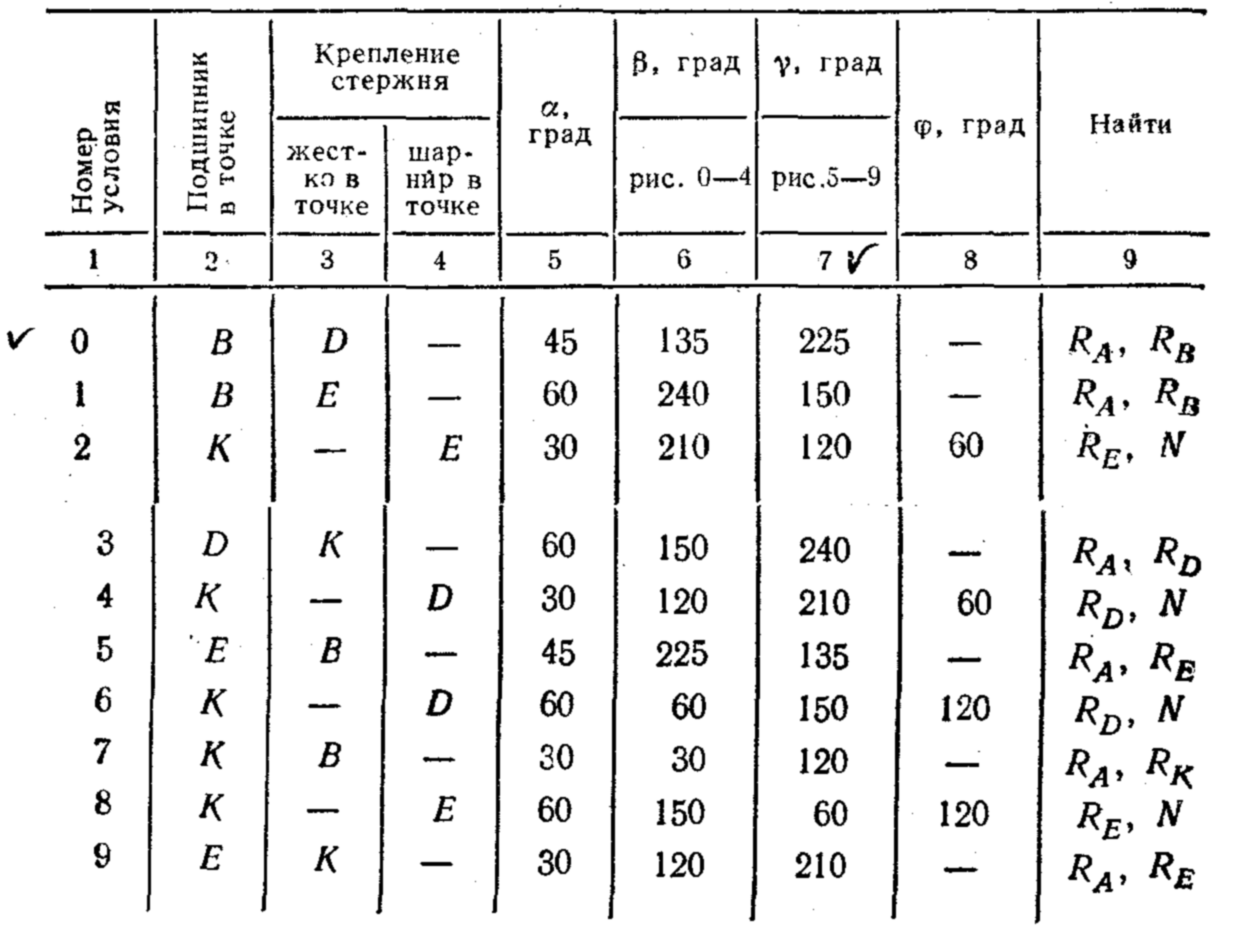 Таблица Д8
Таблица Д8
| Рис.Д8.0 Рис.Д8.1 Рис.Д8.2 |
| Рис.Д8.6 Рис.Д8.7 Рис.Д8.8 |
| 37 |
| Рис.Д8.3 Рис.Д8.4 Рис.Д8.5 |





Задача Д10
| Рис.Д8.10 |
| Рис.Д8.9 |
 Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3—6, прикрепленных к этим нитям, и невесомого блока (рис. Д10.0—Д10.9, табл. Д10). Система движется в вертикальной плоскости под действием сил тяжести ипары сил с моментом М, приложенной к одному из шкивов. Радиусы ступеней шкива равны: R1 = 0,2 м, r1 = 0,1м, а шкива 2 — R2 = 0,3 м, r2 = 0,15 м; их радиусы инерции относительно осей вращения равны соответственно ρ1 = 0,1 м и ρ2 = 0,2 м.
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3—6, прикрепленных к этим нитям, и невесомого блока (рис. Д10.0—Д10.9, табл. Д10). Система движется в вертикальной плоскости под действием сил тяжести ипары сил с моментом М, приложенной к одному из шкивов. Радиусы ступеней шкива равны: R1 = 0,2 м, r1 = 0,1м, а шкива 2 — R2 = 0,3 м, r2 = 0,15 м; их радиусы инерции относительно осей вращения равны соответственно ρ1 = 0,1 м и ρ2 = 0,2 м.
Пренебрегая трением, определить ускорение груза, имеющего больший вес; веса P1, ..., Р6 шкивов и грузов заданы в таблице в ньютонах. Грузы, веса которых равны нулю, на чертеже не изображать (шкивы 1, 2изображать всегда как части системы).
Указания. Задача Д10 — на применение к изучению движения
системы общего уравнения динамики (принципа Даламбера — Лаг-
ранжа). Ход решения задачи такой же, как в задаче Д9, только
предварительно надо присоединить к действующим на систему си-
лам соответствующие силы инерции. Учесть при этом, что для од-
нородного тела, вращающегося вокруг своей оси симметрии (шки-
ва), система сил инерции приводится к паре с моментом Ми=
= Izε, где Iz— момент инерции тела относительно оси вращения,
ε — угловое ускорение тела; направление Мипротивоположно на-
правлению .
Таблица Д10
условия | Р1, Кн | Р2, Кн | Р3, Кн | Р4, Кн | Р5, Кн | Р6, Кн | М, Кн м | ||
| ' 0 | 10 | 0 | 20 | 30 | 40 | 0 | 0,9 | ||
| 1 | 0 | 40 | 0 | 10 | 20 | 30 | 1,2 | ||
| 2 | 20 | 30 | 40 | 0 | 10 | 0 | 0,6 | ||
| 3 | 0 | 20 | 10 | 30 | 0 | 40 | 1,8 | ||
| 4 | 30 | 0 | 20 | 0 | 40 | 10 | 1,2 | ||
| 5 | 0 | 10 | 30 | 40 | 20 | 0 | 0,9 | ||
| 6 | 40 | 0 | 0 | 20 | 30 | 10 | 1.8 | ||
| 7 | 10 | 20 | 0 | 40 | 0 | 30 | 0,6 | ||
| 8 | 0 | 40 | 10 | 0 | 30 | 20 | 0,9 | ||
| 30 | 0 | 40 | 20 | 10 | 0 | 1,2 |



Рис.Д10.0 Рис.Д10.1
Рис.Д10.2 Рис.Д10.3
| Рис.Д10.4 Рис.Д10.5 |
| 39 |



Рис.Д10.6 Рис.Д10.7
| Рис.Д10.8 Рис.Д10.9 |
Задача Д9
Механическая система состоит из ступенчатых шкивов 1 и 2 весом P1 и P2с радиусами ступеней R1 = R, r1 = 0,4R, R2 = R, r2 = O,8R (массу каждого шкива считать равномерно распределенной по его внешнему ободу) и грузов или сплошных однородных цилиндрических катков 3, 4, 5 весом Р3, Р4, Р5соответственно (рис. Д9.0 — Д9.9, табл. Д9). Тела системы соединены нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Грузы скользят по плоскос- тям без трения, а катки катятся без скольжения.
Кроме сил тяжести на одно из тел системы действует постоянная сила F, а на шкивы 1 и 2 при их вращении действуют постоянные мо- менты сил сопротивления, равные соответственно M1 и M2.
Составить для данной системы уравнение Лагранжа и определить из него величину, указанную в таблице в столбце „Найти", где обозначе- но: ε1, ε2— угловые ускорения шкивов 1 и 2, ωc1, ωc2, ωc3- ускоре- ния центров масс тел 3, 4, 5 (если тело 3 или 4 — груз, то ωc3 = ω3, ωc4= ω4 , где ω3и ω4 — ускорения соответствующих грузов). Когда в задаче надо определить ε1 или ε2, считать R = 0,25 м.
| 40 |
Указания.Задача Д9 — на применение к изучению движения системы уравнений Лагранжа. В задаче система имеет одну степень свободы, следовательно, ее положение определяется одной обобщенной координатой и для нее должно быть составлено одно уравнение.
За обобщенную координату q принять: в задачах, где требуется определить Vc1, Vc2, или Vc3— перемещение хцентра масс С соответствующего катка или перемещение груза; в задачах, где требуется определить ε1или ε2, — угол поворота φ соответствующего шкива.
Для составления уравнения вычислить сначала кинетическую энергию Т системы (как в задаче Д4) и выразить все вошедшие в Т скорости через обобщенную скорость, т. е. через х, если обобщенная координата х, или через φ, если обобщенная координата φ. Затем вычислить обобщенную силу Q. Для этого сообщить системе возможное (малое) перемещение, при котором выбранная координата, т. е. х (или φ), получает положительное приращение δх(или δφ ), и вычислить сумму элементарных работ всех сил на этом перемещении; в полученном равенстве надо все другие элементарные перемещения выразить через δх (или через δφ, если обобщенная координата φ) и вынести δх (или δφ) за скобки. Коэффициент при δх: (или δφ) и будет обобщенной силой Q .
Таблица Д10
| Номер условия | P1, Кн | P2, Кн | P3, Кн | P4, Кн | P5, Кн | M1, Кн м | M2, Кн м | F, Кн | Най-ти |
| 0 | 10P | 0 | 4Р | 0 | ЗР | 0,2PR | 0 | 10Р | ωc3 |
| 1 | 0 | 8Р | 0 | 4Р | 2Р | 0 | 0,3PR | 8P | ωc5 |
| 2 | 8P | 0 | 0 | 2P | Р | 0,3PR | 0 | 6Р | ε2 |
| 3 | 0 | 10Р | ЗР | 0 | 2Р | 0 | 0,2PR | 10P | ωc3 |
| 4 | 8P | 6P | 0 | ЗР | 0 | 0,4PR | 0,3PR | 8Р | ωc4 |
| 5 | 10P | 0 | 2P | 0 | 4Р | 0 | 0,4PRR | 8Р | ε1 |
| 6 | 0 | 8Р | 0 | ЗР | 5Р | 0,2PR | 0 | 6Р | ωc6 |
| 7 | 6Р | 4Р | 0 | 0 | ЗР | 0,ЗРR | 0 | 4Р | ε2 |
| 8 | 6Р | 0 | 0 | 5Р | 4Р | 0 | 0,2РR | 6Р | ε1 |
| 9 | 0 | 6Р | 5Р | 0 | 6Р | 0,2PR | 0 | 10Р | ωc5 |
| 41 |
| Рис.Д9.0 Рис.Д9.1 |
| Рис.Д9.4 Рис.Д9.5 |
| Рис.Д9.8 Рис.Д9.9 |
| Рис.Д9.6 Рис.Д9.7 |
| Рис.Д9.2 Рис.Д9.3 |
| 42 |
|

Дата добавления: 2018-02-28; просмотров: 1636; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!