Как повысить КПД электродвигателя
Формула Клосса
Для графического построения механической характеристики пользуются упрощенной формулой, называемой формулой Клосса:
Мк - критическое (максимальное) значение момента. Этому значению момента отвечает критическое скольжение

где λм = Мк/Мн
Формула Клосса применяется при решении вопросов, связанных с электроприводом, осуществляемым с помощью асинхронного двигателя. Пользуясь формулой Клосса можно построить график механической характеристики по паспортным данным асинхронного двигателя. Для практических расчетов в формуле при определении критического момента перед корнем следует принимать во внимание только знак плюс.
Каждый двигатель снабжается техническим паспортом в виде приклепанной металлической таблички, на которой приведены основные характеристики двигателя. В паспорте указан тип двигателя. Например, двигатель типа 4А10082УЗ: асинхронный электродвигатель серии 4А закрытого исполнения с высотой оси вращения 100 мм, с короткой длиной корпуса, двухполюсный, климатического исполнения У, категории 3.
Заводской номер дает возможность отличить электрическую машину среди однотипных.
Далее приведены цифры и символы, которые расшифровываются следующим образом:
3 ~ — двигатель трехфазного переменного тока;
50 Hz — частота переменного тока (50 Гц), при которой двигатель должен работать;
4,0 KW — номинальная полезная мощность на валу электродвигателя;
косинус фи = 0,89 — коэффициент мощности;
220/380V, 13,6/7,8А — при соединении обмотки статора в треугольник она должна включаться на напряжение 220 В, а при соединении в звезду — на напряжение 380 В. При этом машина, работающая с номинальной нагрузкой, потребляет 13,6 А при включении на треугольник и 7,8 А — при включении на звезду;
S1 — двигатель предназначен для длительного режима работы ;
2880 об/мин — частота вращения электродвигателя при номинальной нагрузке и частоте сети 50 Гц.
Если двигатель работает вхолостую, частота вращения ротора приближается к частоте вращения магнитного поля статора;
к. п. д. = 86,5 °/о — номинальный коэффициент полезного действия двигателя, соответствующий номинальной нагрузке на его валу;
IP44 — степень защиты. Двигатель изготовлен во влагоморозостойком исполнении. Может работать в среде с повышенной влажностью и на открытом воздухе. В паспорте указан ГОСТ, класс изоляции обмотки (для класса В предельно допустимая температура 130° С), масса машины и год выпуска.
КПД
Любой электродвигатель потребляет определенное количество электрической энергии и отдает энергию механическую. Сравнение их величин и называется КПД электродвигателей, чем выше этот показатель, тем эффективнее работает мотор. Добиться 100% отдачи невозможно, а вот приблизиться к этой величине максимально близко – задача выполнимая. Сегодня большинство силовых агрегатов имеют КПД в районе 80-90%. Потери складываются из самых разных факторов, в числе которых основными являются следующие:
а) магнитные потери в статоре;
б) вихревые токи;
в) перемагничивание ротора;
г)электрические потери в обмотках статора и ротора;
д)трение подшипников, геометрия зубьев;
е) толщина изолирующего слоя обмотки.
Все это влияет на КПД электродвигателя постоянного тока, снижает эффективность самых современных асинхронных моторов. Так же на уменьшение КПД оказывает влияние необходимость охлаждения двигателя, ведь вентилятор так же потребляет электрическую энергию. Не следует забывать и о нагрузке: КПД двигателя на холостых оборотах равен нулю, а своего максимума обычно коэффициент достигает на ¾ нагрузки.
Как повысить КПД электродвигателя
Увеличение КПД асинхронными двигателями может быть достигнута за счет использования более качественных материалов и усовершенствования конструкции. Это позволить снизить потери и эффективность двигателя станет выше. Например, чем чище медь в обмотке, тем меньше ее сопротивление, а более качественная магнитная сталь позволит уменьшить потери на перемагничивание. В результате будут меньше потери мощности и двигатель будет греться не так сильно. Отсюда вытекает заключение, что на его охлаждение будет тратиться меньше энергии, потребляемой вентилятором.
Позволит повысить КПД двигателя более тонкий слой изоляции обмоток, работа над такими материалами ведется постоянно. Еще одним перспективным направлением является работа над изменением геометрии зубьев двигателя, которая позволит увеличить концентрацию магнитного поля и избежать потерь за счет рассеивания энергии. Расчет КПД электродвигателя обычно учитывает и асимметрию тока. Если на разных фазах напряжение существенно отличается, то это может снизить коэффициент на 5-7%, а это значительная величина. Устранение проблем электросети, таким образом, становится прекрасным способом увеличить КПД используемого оборудования.
Вращающий момент
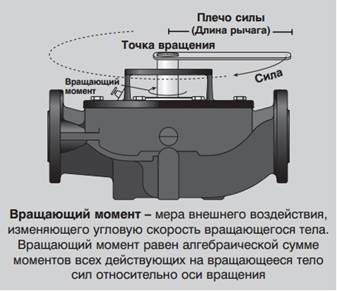
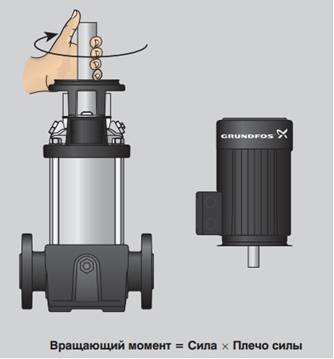
 Вращающий момент (T) - это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Вращающий момент (T) - это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы - или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.

 |
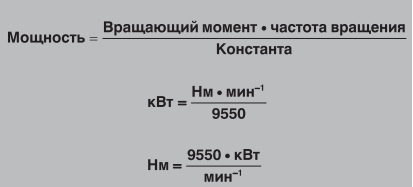
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
 |
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
 |
Приведем единицы измерения к общему виду.
Регулирование частоты вращения АД
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s)
 |
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р искольжение s.
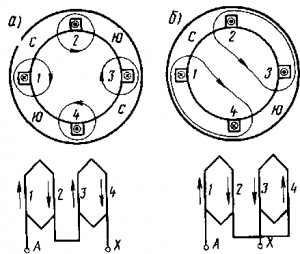
Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения.Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
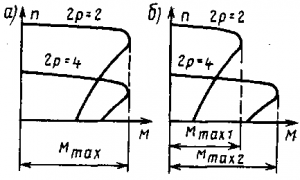 Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
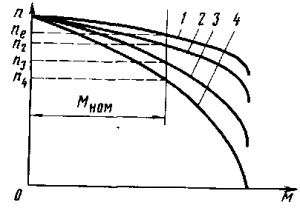
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
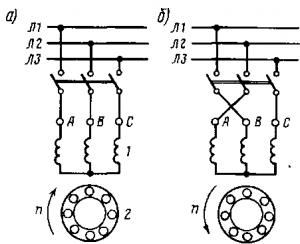
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения.Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
Дата добавления: 2018-02-28; просмотров: 2040; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!