Расчет коэффициента заполнения ШИМ
Импульсный способ регулирования скорости исполнительных двигателей постоянного тока
 Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
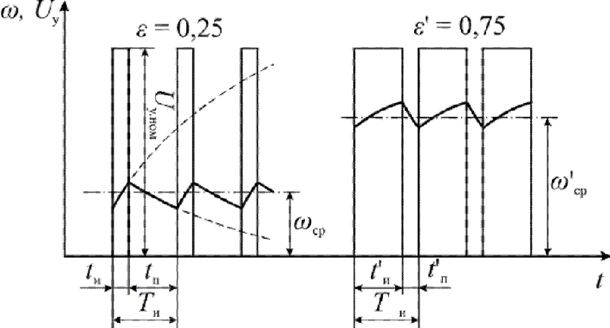
Рис.2.13
При импульсном способе (рис 2.13) к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления Uу.ном,в результате чего его работа состоит из чередующихся периодов разгона и торможения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то угловая скорость ротора не успевает к концу каждого периода достигать установившихся значений и установится некоторая средняя угловая скорость ωcp. Значение ωcp при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью импульсов ε:
ε=tи/Tи, (2.22)
где tи- длительность импульса; Ти - период.
С увеличением относительной продолжительности импульсов (рис.2.13, ε'>ε) угловая скорость ротора растет ( ω'cp> ωcp).В период паузы tп ротор обязательно должен тормозиться. Если это условие не будет выполняться, то угловая скорость ротора при любом значении ? будет непрерывно увеличиваться, пока не достигнет значения угловой скорости х.х., так как во время импульса угловая скорость будет возрастать, а во время паузы – оставаться практически неизменной.
|
|
|
С ростом частоты управляющих импульсов амплитуда колебаний скорости уменьшается; среднее значение угловой скорости остается при этом неизменным.
Принципиальные схемы импульсного регулирования показаны на рис. 2.14.

Рис.2.14
Если к валу двигателя приложен статический момент нагрузки, приводящий к механическому торможению двигателя во время паузы, то возможно применение схемы (рис.2.14,а), в которой ключ К в течение одной части цикла подключает якорь непосредственно к источнику питания, создавая положительный момент (разгон), в течение же другой части – отключает якорь от источника питания (торможение). Если двигатель работает без или с малой статической нагрузкой, то возможно применение электрического торможения (динамического или противовключением) во время паузы. Например, в схеме на рис. 2.14,б ключ К переключает во время паузы якорь на сопротивление Rд для осуществления динамического торможения. В качестве ключевых элементов в современных схемах используются транзисторы или тиристоры; контактные электромагнитные реле, ввиду их низкого быстродействия, практически не применяются.
Рассмотрим механические и регулировочные характеристики исполнительного двигателя постоянного тока при импульсном управлении с торможением за счет статического момента сопротивления Mст на валу (рис.2.14,а). Под механической характеристикой при импульсном управлении понимают зависимость средней угловой скорости от среднего значения момента при неизменной относительной продолжительности импульсов ε. Под регулировочной характеристикой понимают зависимость средней угловой скорости ротора от относительной продолжительности импульсов ε при неизменном среднем моменте на валу двигателя.
|
|
|
В зависимости от параметров двигателя схемы управления и момента нагрузки возможны два основных режима работы двигателя: режим прерывистого тока и режим непрерывного тока.
Режим прерывистого тока характеризуется тем, что ток якоря течет во время импульса, а в течение основного времени паузы tп равен нулю. Этот режим может возникнуть в схеме рис. 2.14,а при τя <Tи (τя-электромагнитная постоянная времени обмотки якоря). Уравнение механических и регулировочных характеристик в относительных единицах имеет вид
ωcp*=1 - Mcp*/ε , (2.23)
Механические характеристики – линейные и начинаются из одной общей точки х.х.; жесткость механических характеристик уменьшается при уменьшении ε. Регулировочные характеристики – нелинейные; регулирование возможно только при Mcp*!!=0.
|
|
|
Режим непрерывного тока характеризуется тем, что во время паузы tп уменьшающийся ток якоря iяпродолжает протекать по якорю в том же направлении, что и во время tи.
Этот режим может возникнуть, например, при регулировании по схеме рис. 2.14,а при Tи <<τя.При отключении ключа К (пауза tп) ток якоря начинает уменьшаться. Возникает ЭДС самоиндукции якоря, стремящаяся поддержать в цепи ток прежнего направления. Направление ЭДС самоиндукции такое, что диод Д оказывается открытым и через него замыкается цепь для тока якоря iя.
При малой амплитуде колебаний мгновенной угловой скорости ток якоря iя и момент Mэм меняются незначительно, и уравнение механических и регулировочных характеристик в относительных единицах имеет вид, аналогичный (2.7):
ωcp*=ε - Mcp* , (2.24)
Механические и регулировочные характеристики будут иметь такой же вид, как и при непрерывном якорном способе управления (см.рис. 2.7) с заменой α на ε. Как видно, закон регулирования угловой скорости в режиме непрерывного тока получается линейным.
|
|
|
В реальных схемах импульсного управления режим работы двигателя в одном диапазоне моментов и угловых скоростей ближе к режиму непрерывного тока, в другом – к режиму прерывистого тока.
Механические и регулировочные характеристики для этого случая представлены на рис. 2.15. Граница перехода из одного режима в другой показана пунктирной линией (механические характеристики,рис.2.15,а). С целью обеспечения линейности регулировочных характеристик (рис.2.15,б) диапазон прерывистых токов стремятся сузить.

Рис.2.15
Основные преимущества импульсного способа управления – меньшее значение средней потребляемой двигателем мощности; возможность управления при нерегулируемом источнике постоянного тока, например, бортовой аккумуляторной батарее. Однако аппаратура управления в общем случае более сложная, чем при непрерывном управлении.
 Система «Широтно-импульсный преобразователь – двигатель» (ШИП-Д)
Система «Широтно-импульсный преобразователь – двигатель» (ШИП-Д)
Рис.2.16
На рис.2.16 приведена классификация основных типов широтно-импульсных преобразователей. Широтно-импульсные преобразователи состоят из силовой части, выполняемой на транзисторах, тиристорах или запираемых тиристорах, и схемы управления; питаются они от сети постоянного тока.
На первых этапах применения полупроводниковых ШИП выбор транзисторной или тиристорной элементной базы основывался на следующих соображениях. Транзисторные ШИП имеют относительно малую мощность, невысокую перегрузочную способность по току (2-2,5 Iном), но позволяют реализовать частоту импульсов до 5 кГц. Тиристорные ШИП более мощные и лучше выдерживают перегрузки по току и напряжению, но позволяют работать с импульсами частотой не более 1 кГц и требуют более сложной схемы управления.
Однако в настоящее время подход к выбору силовой элементной базы ШИП несколько меняется, что объясняется двумя основными факторами. С одной стороны, созданы силовые модули на основебиполярных транзисторов с изолированным затвором, по мощности и перегрузочной способности практически не уступающие тиристорным и работающие на частотах до 10кГц. С другой стороны, в настоящее время все более широко выпускаются достаточно мощные запираемые тиристоры , которые в отличие от обычных тиристоров можно и закрыть подачей соответствующего потенциала на управляющий электрод.
Принцип работы транзисторного ШИП основан на использовании транзисторов в ключевом режиме: транзистор пропускает ток при подаче управляющего сигнала и перестает его пропускать после снятия сигнала.
Транзисторные ШИП в первом приближении можно считать идеальными звеньями с бесконечно малой инерционностью и бесконечно малым внутренним сопротивлением и для анализа систем ШИП-Д пользоваться выражениями механической характеритики и передаточной функции, полученной непосредственно для двигателя.
Принцип работы ШИП на запираемых тиристорах не имеет существенных отличий от работы транзисторного ШИП.
Принцип работы ШИП с обычными тиристорами в отличие оттранзисторных имеет две основные особенности. Во-первых, в состав тиристорного ШИП входит схема искусственной коммутации, которая должна при питании тиристора от сети постоянного тока в требуемый момент времени изменить полярность на аноде и катоде и запереть тиристор. Связано это с тем, что тиристор после отпирания теряет управляемость и запереть его подачей сигнала на управляющий электрод невозможно. Во-вторых, запирание тиристора требует определенного времени, что не позволяет реализовать относительную продолжительность импульсов ε , достаточно близкую к нулю.
Системы с тиристорными ШИП.В схемах искусственной коммутации, которые подразделяются на схемы параллельного и поледовательного типов, для запирания тиристоров обычно используется заряд, накапливаемый конденсатором.
В схемах с параллельной коммутацией, один из вариантов которых показан на рис. 2.17,а, конденсатор С подключен непосредственно к основному тиристору Т1, который отпирается импульсами управления Uи1, следующими с требуемым периодом Ти. Конденсатор С заряжается через добавочное сопротивление Rg и открытый тиристор Т1 до напряжения Uc ≠ U .Для запирания тиристора Т1 – завершения подачи силового импульса на якорь двигателя Я, в момент времени tи подается управляющий импульс Uик на управляющий электрод вспомогательного тиристора Тк.

Рис.2.17
Тиристор Тк отпирается, конденсатор С начинает разряжаться и напряжение Uc, приложенное к тиристору Т1 в запирающем для него направлении, запирает тиристор Т1. При спаде разрядного тока до значения, меньшего удерживающего тока тиристора, запирается и тиристор Тк.
В схемах с последовательной коммутацией, один из вариантов которых показан на рис. 2.17,б, последовательно с якорем двигателя и основным тиристором Т1 включен дроссель L. Коммутирующая цепь, состоящая из конденсатора С, дополнительного дросселя Lк и диода Дк, подключается к источнику постоянного тока с напряжением Uк !!<= U. Наличие в схеме колебательных контуров LC и LкС обеспечивает заряд конденсатора С до напряжения Uc>Uк.
При подаче управляющего импульса на вспомогательный тиристор Тк он открывается и возникает колебательный контур LC, в котором начинает протекать ток разряда конденсатора. В дросселе L возникает ЭДС самоиндукции, значение которой в первый момент времени равно Uc, а направление – противоположно току. Потенциал анода тиристора Т1 становится ниже потенциала катода, и тиристор запирается. Затем в результате колебательных процессов, происходящих в колебательных контурах LC и DкLкC, запирается тиристор Тк и заряжается конденсатор С.
Сравнение схем с параллельной и последовательной коммутацией показывает, что в схемах с последовательной коммутацией время запирания силовых тиристоров меньше за счет наличия колебательного контура. Однако наличие дросселя L в силовой цепи приводит, естественно, к росту постоянных времени системы ШИП-Д. Важным преимуществом схем с последовательной коммутацией является то, что заряд конденсатора происходит во время паузы в силовой цепи. Следовательно, длительность силового импульса tи можно снижать до значений, близких к нулю, не опасаясь того, что конденсатор не успеет зарядиться до требуемого напряжения. Это позволяет существенно расширить диапазон регулирования в область малых скоростей, вплоть до нуля. Выбор конкретной схемы зависит от требований к системе ШИП-Д.
Рассмотренные выше схемы ШИП были нереверсивными, реверсивные ШИП имеют двойной комплект ключевых элементов, включенных наиболее часто по мостовой схеме.
Особенности статических и динамических характеристик. Уравнение механических характеристик системы может быть получено на основе уравнений механических характеристик двигателя (2.4.) с учетом внутреннего сопротивления преобразователя Rшип.экв. Например, в режиме непрерывного тока уравнение будет иметь вид
 (2.25)
(2.25)
Передаточная функция системы ШИП-Д может быть получена на основе теории непрерывных систем автоматического управления, поскольку частота коммутации тиристоров обычно настолько велика, что пульсацией угловой скорости двигателя при анализе динамических процессов можно пренебречь.
Тиристорный ШИП можно рассматривать как усилительное звено с запаздыванием τзап , вносимым схемой управления ШИП. Тогда передаточная функция ШИП
 , (2.26)
, (2.26)
где Кшип – коэффициент передачи ШИП, равный отношению приращений среднего напряжения на якоре Uя.ср и напряжения управления Uу на входе схемы управления ШИП.
Постоянные времени двигателя τ'м и τ'я должны учитывать эквивалентное активное сопротивление Rшип.экв и индуктивность L шип.экв преобразователя, т.е. характеризуют динамические свойства двигателя в системе:

 (2.27).
(2.27).
В целом ряде практических случаев значением Rшип.экв можно пренебречь, а в L шип.экв учитывать только индуктивность дросселя L при последовательной коммутации.
Следует отметить, что в реальных схемах время запаздывания обычно невелико и в первом приближении им можно пренебречь. По сравнению с системой УВ-Д система ШИП-Д отличается более высоким быстродействием при широком диапазоне регулирования скорости.
Схемы управления ШИП. Схема управления ШИП вырабатывает и распределяет во времени последовательности импульсов для управления отпиранием и запиранием силовых тиристоров и транзисторов. Эта схема, позволяющая получить силовые импульсы требуемой длительности в зависимости от уровня напряжения управления при постоянном периоде следования импульсов, получила название широтно-импульсного модулятора (ШИМ). Работа ШИМ обычно основана либо на принципе сложения двух систем разнополярных импульсов прямоугольной формы с регулируемым фазовым сдвигом между системами импульсов, либо на сравнении периодически меняющегося, наиболее часто пилообразного опорного напряжения с сигналом управления. Последний принцип получил широкое распространение при управлении тиристорным ШИП.
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле: 
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:

где:
· Ton — время высокого уровня
· Toff — время низкого уровня
· T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке. Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.

На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.

Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:

Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:

Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляция может быть также частота сигнала, которая рассчитывается по формуле:

Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле. Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.

Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:

В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.

Пример управления светодиодом при помощи ШИМ.
Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:

Упрощенная схема управления светодиодом.
Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.

Схема системы управления скоростью вращения двигателя постоянного тока с защитным диодом.
Для сглаживания всплесков питания между клеммы двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.
Дата добавления: 2018-02-28; просмотров: 3012; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!