Практические конструкции волоконно-оптических датчиков.
Датчик температуры
Принцип работы датчика основан на эффекте флюоресценции. На внешний торец оптического волокна нанесено флюоресцентное вещество (см. рис. 3). Вторичное излучение, возникающее под воздействием зондирующего оптического луча ультрафиолетового диапазона, принимается этим же волокном. Для одной из составляющих флюоресцентного излучения (λ1 = 510 нм) характерна сильная зависимость от температуры измеряемой среды, а для другой (λ2 = 630 нм) — очень слабая.
Рис. 3. Датчик температуры

Температурный сигнал вычисляется как отношение соответствующих интенсивностей на λ1 и λ2 по методу двух длин волн. В качестве зондирующего источника используется ультрафиолетовый светодиод с λ = 300…400 нм.
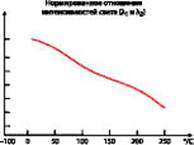
Диапазон измерения температур подобного датчика –50…200°С; точность — 0,1°С; время отклика — около 0,5 с. Зависимость отношения интенсивностей λ1 и λ2 от температуры показана на рисунке 4.
Рис. 4. Передаточная характеристика датчика температуры
Датчик давления
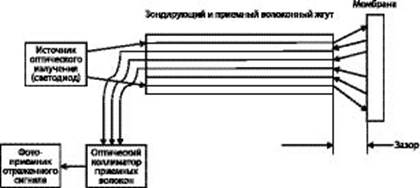
Датчик давления относится к отражательному типу; в нем используется изменение условия отражения света мембраной. Конструктивно датчик состоит из волоконно-оптического жгута, к одному из торцов которого через небольшой зазор (~100 мкм) подсоединена мембрана.
В центре жгута размещаются приемные оптические волокна, а по краям — зондирующие. Коэффициент связи между зондирующими и приемными волокнами изменяется в зависимости от давления, оказываемого на мембрану. Для повышения точности измерения давления на мембрану наносится фотолюминесцентный материал, обеспечивающий излучение опорного светового сигнала, интенсивность которого практически не зависит от величины давления, и обработка сигнала датчика проводится по методу двух длин волн.
|
|
|
Структурная схема датчика давления показана на рисунке 5. В конструкции датчика используется волоконно-оптический жгут из 100 волокон и чувствительная мембрана толщиной около 20 мкм. На практике такой датчик давления позволяет регистрировать давление жидких сред до 10 кПа.
Рис. 5. Датчик давления отражательного типа
Магнитооптический датчик магнитного поля и тока
Для бесконтактных измерений сильных магнитных полей (свыше 10 Э) и соответствующих токов находит применение волоконно-оптический датчик на магнитооптическом эффекте Фарадея.
Магнитооптический эффект заключается во вращении плоскости линейно поляризованного света, распространяющегося в веществе вдоль силовых линий магнитного поля, проходящих через это вещество. Это открытие Фарадея явилось первым доказательством наличия прямой связи между магнетизмом и светом.
|
|
|
Проходящее через среду линейно поляризованное излучение всегда может быть формально представлено как суперпозиция двух поляризованных по правому и левому кругу волн с противоположным направлением вращения. Намагниченное внешним полем оптически прозрачное вещество в общем случае нельзя охарактеризовать единым показателем преломления n. Показатели преломления n+ и n– для излучения правой и левой круговых поляризаций становятся различными (магнитная анизотропия). Различие n+ и n– приводит к тому, что поляризованные по правому и левому кругу компоненты излучения распространяются в среде с различными фазовыми скоростями, приобретая разность фаз, линейно зависящую от оптической длины пути. В результате на выходе из вещества плоскость поляризации монохроматической световой волны поворачивается на угол φ. При этом знак угла поворота плоскости поляризации не зависит от направления распространения света (по вектору магнитной индукции или против него). Важно лишь, чтобы вектор индукции был параллелен направлению распространения оптической волны.
Радианная мера угла фарадеевского вращения φ при магнитной индукции B и длине оптического пути в веществе L выражается как:
|
|
|
φ =V.B.L, (4)
где V — постоянная Верде, определяющая магнитооптическую активность для данного вещества (зависит от химического состава вещества, температуры и рабочей длины волны).
Учитывая, что между величиной магнитной индукции B и протекающим в обмотке соленоида током существует однозначная связь, магнитооптический датчик можно использовать для измерения тока, который можно вычислить из формулы:
В = 0,0126.N.I/L, (5)
где N — количество витков соленоида; I — протекающий ток; L — длина намотки.
В технике физического эксперимента для измерения магнитных полей получили распространение магнитооптические монокристаллы железоиттриевого граната (ЖИГ). Датчики на их основе обладают чувствительностью порядка 15% изменения интенсивности света на каждые 100 Гс магнитной индукции в частотной полосе ~15 кГц. При изменении температуры от –30 до 120°C изменение амплитуды выходного сигнала составляет около 2%. Рабочая длина световой волны равна 1,3 мкм. Фарадеевские датчики не содержат полупроводниковых компонентов, и поэтому нечувствительны к электромагнитным помехам.
|
|
|
Применение магнитооптического датчика для измерения тока и вектора магнитной индукции соленоида мощного электромагнитного клапана иллюстрирует рисунок 6. Диапазон изменения тока — от 1 А в режиме удержания до 10 А — в стартовом режиме. Оптический датчик закреплен на оси измеряемого соленоида, на расстоянии около 5 мм от верхней плоскости силовой обмотки. Датчик представляет собой цилиндр, содержащий поляризатор, монокристалл ЖИГ и расщепитель выходного луча, к торцам которого подсоединены выходные оптические многомодовые волокна. Входной световод подключен с помощью стержневой линзы к верхнему торцу цилиндра.
Рис. 6. Магнитооптический датчик на эффекте Фарадея
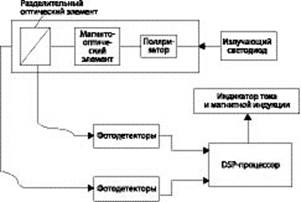
Для повышения помехозащищенности измерений в аппаратуре датчика используется алгоритм обработки сигнала по методу двух лучей. В данном случае прошедшая через магнитооптический кристалл световая волна с плоскостью поляризации, повернутой на угол φ, расщепляется на два луча, имеющие взаимно перпендикулярные плоскости поляризации P и S. Интенсивность каждой компоненты выражается по формулам (1, 2).
Каждый луч детектируется отдельным фотодетектором, после чего DSP вычисляет величину m и далее, с учетом выражений (3—5) рассчитывается величина магнитной индукции В и соответствующий ей ток I соленоида. Данные измерений выводятся на индикатор.
Волоконно-оптический датчик ускорения
Принцип работы датчика основан на эффекте оптического двойного лучепреломления [3]. Существует целый класс кристаллов, в которых одному направлению распространения света соответствуют две пространственные моды с линейной поляризацией. В таких кристаллах коэффициент преломления для направления поляризаций каждой моды изменяется пропорционально приложенному воздействию, в данном случае — механическому со стороны груза, под действием ускорения (см. рис. 7). В этом состоит эффект фотоупругости.
Рис. 7. Датчик ускорения на эффекте фотоупругости
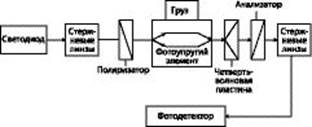
Груз прикреплен непосредственно к оптическому элементу, и при колебаниях груза на элемент действует сила, пропорциональная произведению массы на ускорение, что приводит к появлению двойного лучепреломления. Из-за этого на выходной торцевой поверхности оптического кристалла появляется разность фаз Ψ, пропорциональная разности оптических ходов лучей ∆L, которая зависит от разности коэффициентов преломления мод в кристалле. Если между оптическими модами возникает разность фаз, то световая волна имеет на выходе кристалла круговую поляризацию [2]. Расположенная после фотоупругого элемента четвертьволновая пластина преобразует световые волны с круговой поляризацией в излучение с линейной поляризацией. После анализатора оптическая мощность детектируется фотодетектором. Она подчиняется закону:
Р = Р0.(1 + sin(π.T/Tπ),
где Tπ — величина давления, при котором разность фаз лучей на выходе кристалла равна π (полуволновое давление); T — текущее давление груза на фотоупругий кристалл. Зная массу груза, по величине Т можно оценить ускорение.
С помощью волоконно-оптического акселерометра рассмотренного типа возможно измерение ускорений
0,1…30g с точностью до 1% в частотной полосе до 3 кГц.
Волоконно-оптическийгироскоп
Гироскоп является ключевым элементом инерциальной системы управления и навигации, который выполняет функцию измерения угловой скорости. К авиационным и космическим гироскопам предъявляются достаточно высокие требования: минимальное время запуска, высокая разрешающая способность, дрейф нуля не хуже 0,01 град/час, динамический диапазон измерения угловой скорости — 6 порядков, высокая помехозащищенность от спонтанных и регулярных электромагнитных помех.
Во многих авиационных и робототехнических системах до сих пор применяются механические гироскопы, принцип действия которых основан на законе сохранения момента количества движения — удержании оси вращения тела в определенном направлении пространства. При производстве этих приборов требуется высокая точность формы тела вращения, обеспечение минимально возможного трения механических элементов гироскопа, система автоматического регулирования, обеспечивающая высокую степень стабилизации вращения вала гиромотора.
Волоконно-оптические гироскопы кольцевого типа, основанные на эффекте Саньяка, выгодно отличаются от механических гироскопов отсутствием подвижных элементов, высокой чувствительностью и линейной характеристикой измерения, практически мгновенным временем запуска. Кроме того, данные гироскопы не чувствительны к электромагнитным помехам.
Кольцевой волоконно-оптический гироскоп функционирует следующим образом (см. рис. 8). В кольцо из одномодового оптического волокна через оптические линзы (поз. 1, 2) и разделительную оптическую пластину, расположенную под углом 45 градусов относительно оптической оси источника, вводится лазерное излучение.
Рис. 8. Структурная схема волоконно – оптического гироскопа
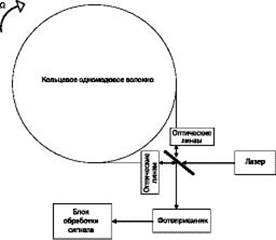
Благодаря пластине световые волны в оптоволокне распространяются во встречных направлениях. Если система находится в покое относительно инерциального пространства, то оптические пути встречных волн одинаковы, и разность фаз между ними не возникает. При вращении оптической системы с угловой скоростью Ω из-за разности времен достижения разделительной пластины этими волнами возникает разность фаз Φ, выражаемая формулой [2]:
Φ = 4.(2π/λ).S.Ω/c,
где с — скорость света в волокне; S — площадь круга внутри контура оптического кольца; λ — длина волны лазера.
Из-за наличия разности фаз выходных лучей в плоскости зрачка фотоприемника возникает интерференционная картина, а интенсивность принимаемого сигнала выражается как [2]:

Р = Р1 + Р2 + ().соs Φ,
где Р1, Р2 — интенсивности встречных оптических волн.
После фотодетектирования, исходя из последних двух выражений, блок обработки сигнала рассчитывает угловую скорость вращения Ω. Специальная оптическая система обеспечивает условие Р1 = Р2, так как при этом чувствительность системы к изменениям фазы Φ оптимальна.
Рассмотренный гироскоп позволяет измерять угловую скорость с высокой точностью изменения фазы (до 10–6 рад). На этом принципе уже созданы малогабаритные оптические гироскопы, имеющие катушку из одномодового волокна небольшого радиуса (3—5 см), на которую намотано несколько сотен метров оптоволокна. Они нашли применение в системах автоматического управления и навигации авиационной и космической техники, в появляющихся образцах военной робототехники. В настоящее время в Японии, России, США, Франции ведутся активные исследования в области создания интегральных оптических гироскопов на этом принципе.
Заключение
Основными направлениями развития волоконно-оптических датчиков в настоящее время являются интегрально-оптические технологии, которые позволят объединить электронные схемы обработки и микрооптические компоненты в одном кристалле или микромодуле. Это значительно снизит себестоимость волоконных датчиков и повысит их эксплуатационные характеристики.
Другим перспективным направлением считается соединение возможностей уже созданной МЭМС-технологии и интегральной оптики. Это может привести к созданию целого класса устройств, реализация которых в макромасштабе крайне затруднительна или невозможна. Примером объединения оптики, механики и электроники могут служить микромеханические устройства, изготовленные с использованием микро- и нанотехнологий: например, DLP-процессор, основанный на технологии пьезоактуаторов, использует массив поворотных микрозеркал, модулирующих отраженный поток света по заданному алгоритму. Такая технология была разработана и запатентована фирмой Texas Instrument и на ее основе выпускаются проекционные DLP-телевизоры и проекторы.
Литература
1. Гауер Д. «Оптическая связь», гл. 1–2// М, «Радио и связь», 1988 г.
2. Окоси Т. и др. «Волоконно-оптические датчики», пер с японского//Энергоатомиздат, 1990 г.
3. Фейнман Р., Лейтон Р., Сендс М., «Фейнмановские лекции по физике», т. 3, «Едиториал УРСС», 2004 г.
Дата добавления: 2016-01-06; просмотров: 17; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!