Выбор класса защиты.
Продолжим изучение вопросов, связанных с американским стандартом защиты информации "Оранжевая книга". В предыдущем параграфе были определены семь классов систем защиты информации, причем требования в классах от С к А монотонно возрастали. Американцы не опубликовали детальный анализ риска, который определяет эти требования. Однако, одновременно со стандартом, был опубликован документ "Computer Security Requirements-Guidance for Applying the DoD Trusted Computer System Evaluation Criteria in Specific Environment" (далее будем называть его "Требования"), в котором изложен порядок выбора класса систем в различных условиях. Этот документ частично отражает результаты анализа риска, основания для выбора политики безопасности в связи с этими рисками и меры обеспечения гарантий соблюдения политики безопасности. Всюду далее предполагаем, что в информацию внесена MLS решетка ценностей. Выбор требуемого класса безопасности систем определяется следующими основными факторами, характеризующими условия работы системы.
1. Безопасность режима функционирования системы. Американцы различают 5 таких режимов:
а. Режим, в котором система постоянно обрабатывает ценную информацию одного класса в окружении, которое обеспечивает безопасность для работы с этим классом.
в. Режим особой секретности самой системы. Все пользователи и элементы системы имеют один класс и могут получить доступ к любой информации. Этот режим отличается от предыдущего тем, что здесь обрабатывается информация высших грифов секретности.
|
|
|
с. Многоуровневый режим, который позволяет системе обработку информации двух или более уровней секретности. Причем не все пользователи имеют допуск ко всем уровням обрабатываемой информации.
d. Контролирующий режим. Это многоуровневый режим обработки информации, при котором нет полной гарантии защищенности ТСВ. Это накладывает ограничения на допустимые классы ценной информации, подлежащей обработке.
е. Режим изолированной безопасности. Этот режим позволяет изолированно обрабатывать информацию различных классов или классифицированную и неклассифицированную информацию. Причем возможно, например, что безопасно обрабатывается только информация класса TS, а остальная информация не защищена вовсе.
2. Основой для выбора класса защиты является индекс риска. Он определяет минимальный требуемый класс.
Отобразим классы секретности в числа согласно таблице: U-0, С-1, S-2, TS-3. Эта таблица не совсем точно отражает соответствие из "Требований". Но здесь мы просто объясняем идею подхода. Определим Rmin - минимальный уровень допуска пользователя в системе, и Rmax - максимальный класс ценности информации, присутствующий в системе. В большинстве случаев индекс риска определяется по формуле:
|
|
|
Risk Index=Rmax-Rmin
Исключения касаются случая, когда  , тогда
, тогда
{ 1, если есть категории, к которым кто-либо из пользователей не имеет доступа
RiskIndex = {
{ 0, в противном случае
И также некоторые исключения есть в случае обработки TS-информации.
Пример 1. Если минимальный допуск пользователя в системе - С, а максимальный гриф обрабатываемой информации - S, то Rmin =2, Rmax=3. Тогда RiskIndex = l.
В результате учета всех ценностей и определения дополнительных классов у американцев получается восемь значений индекса риска от О до 7. Для этих значений индекса риска устанавливается следующее соответствие с минимальными требуемыми классами систем в случае, когда система функционирует во враждебном окружении.
| RiskIndex | Безопасность режима функционирования | Минимальный класс по классификации “Оранжевой книги” |
| a | нет обязательного минимума | |
| b | B1 | |
| c, d, e | B2 | |
| c, d, e | B3 | |
| c, d | A1 | |
| c | A1 | |
| c | * | |
| c | * | |
| c | * |
Символ * означает, что в момент издания книги (1985 г.) минимальные требования по защите информации при данном значении индекса риска выше достигнутого уровня технологии.
|
|
|
Если система функционирует в окружении, которое можно назвать "безопасным периметром", то требования к минимальным классам значительно ниже.
80. Математические методы анализа политики безопасности. Модель "take-grant"
Будем по-прежнему описывать функционирование системы при помощи графов доступов Gt и траекторий в фазовом пространстве V={G}. Единственное дополнение - правила преобразования графов. Будем считать, что множество доступов R={r, w, c}, где r - читать, w - писать, с - вызывать. Допускается,что субъект X может иметь права aÍR на доступ к объекту Y, эти права записываются в матрице контроля доступов. Кроме этих прав мы введем еще два: право take (t) и право grant (g), которые также записываются в матрицу контроля доступов субъекта к объектам. Можно считать, что эти права определяют возможности преобразования одних графов состояний в другие. Преобразование состояний, то есть преобразование графов доступов, проводятся при помощи команд. Существует 4 вида команд, по которым один граф доступа преобразуется в другой.
1. Take. Пусть S - субъект, обладающий правом t к объекту X и aÍR некоторое право доступа объекта X к объекту Y. Тогда возможна команда "S take aforY from X". В результате выполнения этой команды в множество прав доступа субъекта S к объекту Y добавляется право a. Графически это означает, что, если в исходном графе доступов G был подграф
|
|
|

то в новом состоянии G', построенном по этой команде t, будет подграф
2. Grant. Пусть субъект S обладает правом g к объекту X и правом aÍR к объекту Y. Тогда возможна команда "S grant afor Y to X". В результате выполнения этой команды граф доступов G преобразуется в новый граф G', который отличается от G добавленной дугой (Х Y). Графически это означает, что если в исходном графе G был подграф

то в новом состоянии G' будет подграф

3. Create. Пусть S - субъект, bÍR. Команда "S create P for new object X" создает в графе новую вершину X и определяет Р как права доступов S к X. То есть по сравнению с графом G в новом состоянии G' добавляется подграф вида

4. Remove. Пусть S - субъект и X - объект, bÍR. Команда "S remove Р for X" исключает права доступа Р из прав субъекта S к объекту X. Графически преобразования графа доступа G в новое состояние G' в результате этой команды можно изобразить следующим образом:

в G в G’
Далее будем обозначать G|-cG', если команда с преобразует G в G', а также G |- G', если существует команда с, что G|-G'. Будем понимать под безопасностью возможность или невозможность произвольной фиксированной вершине Р получить доступ aÎR к произвольной фиксированной вершине X путем преобразования текущего графа G некоторой последовательностью команд в граф G', где указанный доступ разрешен.
Определение. В графе доступов G вершины Р и S называются tg-связными, если существует путь в G, соединяющий Р и S, безотносительно ориентации дуг, но такой, что каждое ребро этого пути имеет метку, включающую t или g.
Теорема 1. Субъект Р может получить доступа к, объекту X, если существует субъект S, имеющий доступ а, к вершине X такой, что субъекты Р и S связаны произвольно ориентированной дугой, содержащей хотя бы одно из прав t или g
Доказательство. Возможны 4 случая.
1. В G есть подграф

Тогда имеем право применить команду "Р take a for X from S" и получим в G' подграф

2. В G есть подграф 
Тогда имеем право применить команду "S grant а for X to Р" и получим в G' подграф

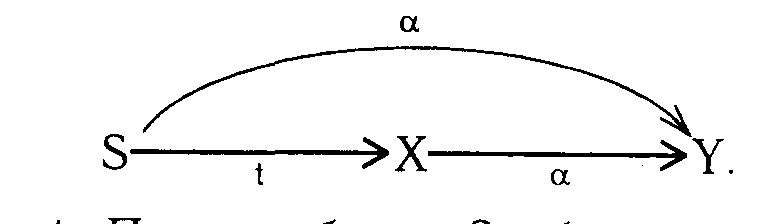
3. В графе G есть подграф 
Тогда применяем следующую последовательность разрешенных команд для преобразования графа G:"Р create tg for new object Y"

"Р grant g for Y to S"
"S grant a for X to Y"

"Р takes a for X from Y"

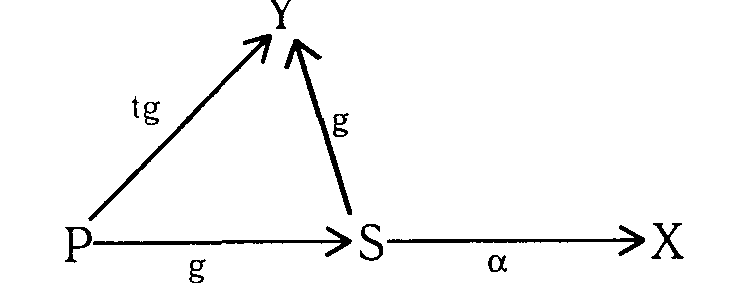
4. В графе G есть подграф 
Тогда применяем следующую последовательность разрешенных команд для преобразования графа G в граф G' с дугой (Р X). "Р create tg for new object Y"

Далее будем записывать преобразования графов коротко

Теорема доказана.
Замечание. Метка с правом а на дуге в рассматриваемых графах не означает, что не может быть других прав. Это сделано для удобства.
Теорема. 2. Пусть в системе все объекты являются субъектами. Тогда субъект Р может получить доступ а к субъекту X тогда и только тогда, когда выполняются условия:
I. С уществует субъект S такой, что в текущем графеG есть дуга  .
.
2. S tg-связна с Р.
Доказательство. 1. Достаточность.
Доказательство будем вести индукцией по длине n tg-пути, соединяющего S и Р. При n=l утверждение доказано в теореме 1. Пусть длина tg-пути в G, соединяющего S и Р равна n>1. Пусть также есть вершина Q на этом tg-пути, которая смежна с S. Тогда по теореме 1 можно перейти к графу G', в котором  . Ясно, что проводимые при этом команды не уничтожают tg-пути, ведущего из Р в Q. При этом длина пути из Р в Q равна (n-1), что позволяет применить предположение индукции. Тогда возможен переход от G' к G", в котором есть дуга
. Ясно, что проводимые при этом команды не уничтожают tg-пути, ведущего из Р в Q. При этом длина пути из Р в Q равна (n-1), что позволяет применить предположение индукции. Тогда возможен переход от G' к G", в котором есть дуга  . Сквозной переход от G к G’ доказывает достаточность.
. Сквозной переход от G к G’ доказывает достаточность.
2. Необходимость.
Пусть для пары вершин Р и X в графе G нет дуги  , а после выполнения некоторой последовательности команд в графе G' есть дуга . Если в G нет ни одной вершины S, для которой существует дуга
, а после выполнения некоторой последовательности команд в графе G' есть дуга . Если в G нет ни одной вершины S, для которой существует дуга  , то для любой команды с преобразования графа G в графе G’ полученном G|-cG’ при помощи с, также нет ни одной вершины S, из которой выходит дуга
, то для любой команды с преобразования графа G в графе G’ полученном G|-cG’ при помощи с, также нет ни одной вершины S, из которой выходит дуга 
 . Это следует из просмотра всех четырех допустимых команд. Тогда для любой последовательности команд в графе G’, полученном из G применением этой последовательности команд, также нет какой-нибудь вершины S с дугой
. Это следует из просмотра всех четырех допустимых команд. Тогда для любой последовательности команд в графе G’, полученном из G применением этой последовательности команд, также нет какой-нибудь вершины S с дугой  . Тогда такой вершины нет в графе G', что противоречит условию. Следовательно, в графе G есть S такая, что .
. Тогда такой вершины нет в графе G', что противоречит условию. Следовательно, в графе G есть S такая, что .
Пусть G' такой граф, когда впервые появляется дуга  . Пусть G’ такой граф, из которого по некоторой команде получился G'. Тогда просмотр команд позволяет заключить, что дуга
. Пусть G’ такой граф, из которого по некоторой команде получился G'. Тогда просмотр команд позволяет заключить, что дуга  возникла применением к некоторому , команды take или grant. Это значит, что в графе G’ от Р к S существует tg-путь длины 1.
возникла применением к некоторому , команды take или grant. Это значит, что в графе G’ от Р к S существует tg-путь длины 1.
Пусть в графе G вершины Р и S не связаны tg-путем. Тогда при любой команде с в графе G’, полученном из G командой с G|-cG’, также нет tg-пути из Р в S. В самом деле, возьмем take

Если в р не было take или grant, то новая дуга не увеличивает количество дуг с правом take или grant в новом графе, поэтому новый tg-путь возникнуть не может. Если в р есть t или g, то между V и Z существовал tg-путь и новая дуга не увеличила числа tg-связных вершин и поэтому не могла связать Р и S. Аналогично, если Y и Z были связаны дугой grant. Команда create также не может связать существующие вершины Р и S tg-путем.
Значит при любой последовательности команд c1,...cn, если в G нет tg-пути из Р в S, то их нет в G’ полученном из G G|-c1,...cnG’. Но это противоречит сделанному выше заключению о наличии такого пути длины 1 в графе G’. Теорема доказана.
Дата добавления: 2016-01-05; просмотров: 18; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!