Задание №1 Проверка основного закона динамики поступательного движения
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования
«Сибирский государственный аэрокосмический университет
Имени академика М. Ф. Решетнева»
(СибГАУ)
ПРОВЕРКА ВТОРОГО ЗАКОНА ДИНАМИКИ
НА МАШИНЕ АТВУДА
Методические указания к выполнению
лабораторной работы 2
Красноярск 2013
Лабораторная работа 2
ПРОВЕРКА ВТОРОГО ЗАКОНА МЕХАНИКИ
НА МАШИНЕ АТВУДА
Цель работы: проверка основного закона динамики поступательного движения.
Приборы и принадлежности: машина Атвуда, набор грузов и перегрузков, секундомер.
Краткие теоретические сведения
Динамика раздел механики изучающий движения тел в связи с теми причинами (взаимодействия между телами), которые обуславливают тот или иной характер движения. Мерой взаимодействия тел является сила. Классическая (ньютоновская) динамика опирается на три закона описывающие взаимодействия тел (законы Ньютона).
Первый закон Ньютона определяет границы применимости остальных законов и связан с понятием инертности, введенным в физику Г. Галилеем. Первый закон Ньютона (закон инерции) гласит: существуют такие системы отсчета, в которых всякая материальная точка (тело) сохраняет состояние покоя или прямолинейного равномерного движения, до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние.
Первый закон Ньютона показывает, что состояние покоя или прямолинейного равномерного движения не требует для своего поддержания каких-либо внешних воздействий. В этом проявляется особое динамическое свойство всех тел, называемое инертностью. Но инерция наблюдается не во всякой системе отсчета. Система отсчета в механике это совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение. Для количественного описания движения, тела образующие систему отсчета, связываются с системой координат, и выбирается способ отсчета времени (часы). Те системы, где наблюдается инерция (выполняется первый закон Ньютона) называют инерциальными системами, где не наблюдается – неинерциальными. Рассмотрим инерциальные и неинерциальные системы отсчета на примере описания движения шара лежащего на гладком полу каюты корабля. Когда корабль движется прямолинейно и равномерно, сумма сил действующих на шар равна нулю. Шар будет покоиться, в системе отсчета связанной с кораблем, пока на него не начнут воздействовать другие тела. В системе отсчета связанной с Землей шар движется прямолинейно и равномерно со скоростью корабля, пока на него не начнут воздействовать другие тела. В обеих этих системах при движении шара выполняется первый закон Ньютона, следовательно, обе системы – инерциальные. Теперь пускай корабль начнет менять свою скорость, например, тормозить. В этом случае шар не будет находиться в покое и начнет движение по полу каюты. В системе отсчета связанной с Землей шар продолжает двигаться прямолинейно и равномерно, стремясь и дальше сохранять свою скорость. В этой системе выполняется первый закон Ньютона, и система является инерциальной. В системе отсчета связанной с кораблем, шар приобретает ускорение без воздействия на него других тел. В такой системе не выполняется первый закон Ньютона и она будет неинерциальной.
Можно также сделать вывод, что инерциальными будут все системы, которые покоятся или движутся прямолинейно и равномерно относительно инерциальной системы. На основе этого Г. Галилей сформулировал свой Принцип относительности:
1. Ни какими механическими опытами нельзя установить покоится инерциальная система или она движется прямолинейно и равномерно.
2. Все инерциальные системы равноправны.
3. Законы классической механики во всех инерциальных системах отсчета имеют один и тот же вид, т.е. они инвариантны к преобразованиям Галилея (переходу от одной инерциальной системы отсчета к другой).
Замечание: строго говоря, система отсчета жестко связанная с Землей (геоцентрическая, лабораторная система отсчета) не является инерциальной системой, т.к. Земля движется с ускорением из-за вращения вокруг своей оси и вращения вокруг Солнца. Но ускорения, вызванные этим вращением крайне малы. Для большинства задач систему отсчета связанную с Землей можно считать инерциальной системой.
Чтобы вывести тело из состояния прямолинейного равномерного движения необходимо, чтобы на материальную точку начала действовать сила. Второй закон Ньютона в наиболее общей формулировке гласит: скорость изменения импульса материальной точки равна действующей на нее силе
 ,
,
где векторная величина
 ,
,
численно равная произведению массы материальной точки на ее скорость и имеющая направление скорости, называется импульсом (количеством движения) этой материальной точки. Второй закон Ньютона, в этой форме записи, справедлив не только в классической механике, но и релятивисткой механике.
Перепишем второй закон Ньютона, расписав импульс



 .
.
Выразив ускорение, получим другую форму записи второго закона Ньютона: ускорение, приобретаемое материальной точкой, пропорционально вызывающей его силе, совпадает с нею по направлению и обратно пропорционально массе материальной точки
 .
.
Масса выступает мерой инерциальных свойств материальной точки. Различие в массе тел приводит к тому, что при действии одной и той же силы на различные тела их ускорение оказывается различным.
Сила, с которой одна материальная точка действует на другую, зависит только от координат и скоростей только этих двух материальных точек. Присутствие других материальных точек на эту силу не влияет. Это свойство называется законом независимости действия сил или законом парности взаимодействия. Из закона парности следует, что если на тело действует несколько сил, под  понимают векторную сумму сил, действующих на тело (равнодействующую силу)
понимают векторную сумму сил, действующих на тело (равнодействующую силу)
 ,
,

 .
.
Из закона парности взаимодействия вытекает и третий закон Ньютона: силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю, противоположно направлены и действуют вдоль прямой, соединяющей эти точки:
 ,
,

Рис. 1
где  - сила, действующая на первую материальную точку со стороны второй;
- сила, действующая на первую материальную точку со стороны второй;  - сила, действующая на вторую материальную точку со
- сила, действующая на вторую материальную точку со
стороны первой. Эти силы приложены к разным материальным точкам (телам) и являются силами одной природы.
Описание установки
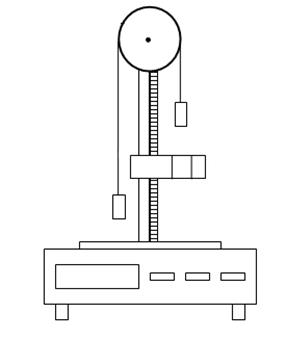
В лаборатории механики машина Атвуда представлена на двух установках: настенной (рис.2а) и настольной (рис 2б). Обе установки имеют одни и те же основные узлы и их различия несущественны при выполнении данной работы. Данная лабораторная работа может выполняться на любой из лабораторных установок.
Установка настенная (Рис. 2а) состоит из длинной, вертикальной, разделенной на сантиметры рейки, на верхнем конце которой укреплен неподвижный блок, вращающийся вокруг горизонтальной оси. Через блок перекинута нить, на концах которой подвешены два одинаковых груза. Блок управления состоит из электромагнита с ключом К1, и секундомера с ключом К2. Секундомер включается ключом в момент начала движения системы и выключается автоматически при соприкосновении груза к полке D.
| 
|
| Рис. 2а | Рис. 2б |
Установка настольная (Рис. 2б) отличается тем, что шкала нанесена на вертикальной штанге, а не на рейке. На штанге крепятся кронштейны. Электромагнит, удерживающий систему в состоянии покоя, установлен на верхнем кронштейне. Верхний и средний кронштейны можно перемещать по штанге и фиксировать в любом положении. Это дает возможность изменять длину пути равноускоренного и равномерного движений.
Блок управления содержит кнопки «Сеть», «Пуск», «Сброс» и цифровой секундомер. При нажатии кнопки «Пуск» секундомера происходит отключение электромагнита, груз опускается, фотоэлектрический датчик на среднем кронштейне, фиксирующий начало движения и автоматически включает секундомер. На среднем кронштейне может быть закреплено кольцо, не используемое в данной лабораторной работе (оно используется при выполнении лаб. работы №12).
На неподвижном нижнем кронштейне установлены: приемный столик и еще один фотоэлектрический датчик, фиксирующий окончание движения системы и автоматически выключающий секундомер.
Регулировочные опоры в нижней части установки используют для регулировки положения экспериментальной установки на лабораторном столе. Перед проведением опытов прибор следует установить в строго вертикальное положение с помощью ножек–винтов.
Задание №1 Проверка основного закона динамики поступательного движения
Целью выполнения данного задания является проверка второго закона Ньютона. Точнее сам закон Ньютона экспериментально достаточно сложно проверить, т.к. трудно учесть действие всех внешних сил. Чтобы убедиться в справедливости закона проверяют следствие из него.
Если рассмотреть действия различных сил действующей на одно и то же тело, то второй закон Ньютона гласит, что ускорения, приобретаемые телом, будут пропорциональны равнодействующим приложенных сил. Вследствие этого отношения величин равнодействующих сил и вызываемых ими ускорений равны
 .
.
Выражение является следствием второго закона Ньютона. Его и предстоит проверить в данной работе. Чтобы сообщить ускорение системе на грузы на нити мы будем добавлять дополнительные грузы различной массы (перегрузки). На установке 2а опускаться начинает левый груз, на 2б – правый.
При движении системы, при вращении блока вокруг оси возникает сила трения, пренебречь которой нельзя, т.к. по величине она сравнима с теми силами, которые приводят в движение систему. Однако действие трения может быть компенсировано добавочным грузом массой μ, помещенным на груз, который движется вниз. Для установки 2а, это делается с помощью кусочков пластилина добавляемых к левому грузу. Для установки 2б, в полость правого цилиндра засыпается песок (или дробь). После компенсации трения, оба груза, подвешенные на нити, перекинутой через блок, самопроизвольно не приходят в движение, а во время подталкивания одного из них, они будут двигаться равномерно с той же скоростью, которую им сообщили.
Рассмотрим дальнейшие действия на примере установки 2а. Если после компенсации силы трения на грузы: левый массой m+μ, и правый m - массой положить перегрузки, то грузы будут двигаться равноускоренно. Подбираем четыре перегрузка так, чтобы (m1 + m2) была немного больше (m3 + m4). Больший груз (m1 + m2) помещаем слева на нити, меньший – справа.
В результате массы грузов с перегрузками (рис. 3)
М1= m+μ+(m 1 + m 2),
М2= m +(m 3 + m 4).
Запишем в векторной форме для грузов на нитях второй закон Ньютона, а для неподвижного блока основной закон динамики вращательного движения
где  - суммарный момент сил, действующих на блок. Считая нить нерастяжимой, мы можем считать, что оба груза движутся с одинаковым ускорением.
- суммарный момент сил, действующих на блок. Считая нить нерастяжимой, мы можем считать, что оба груза движутся с одинаковым ускорением.
Затем перепишем уравнения движения грузов на нити в проекциях на ось y, а уравнение вращательного движения блока в проекции на ось z

Суммарный момент сил Mz складывается из моментов сил натяжения действующих на блок и момента силы трения в блоке (до компенсации трения)
 ,
,
где R – плечо силы (радиус блока). Для компенсации момента силы трения в работе использовался добавочный груз массой μ. С учетом дополнительного момента сил создаваемого этим грузом μgR получим
 .
.
При условии компенсации момента силы трения добавочным грузом μgR=Mтр, получим для суммарного момента сил
 .
.
А система уравнений примет вид

где  . Если масса блока мала по сравнению с массой груза на нити mблока<<m, то мы может ею пренебречь, т.е. J=0 и следовательно силы натяжения с обеих сторон блока одинаковы
. Если масса блока мала по сравнению с массой груза на нити mблока<<m, то мы может ею пренебречь, т.е. J=0 и следовательно силы натяжения с обеих сторон блока одинаковы  .
.

|
Рис. 3
В результате система уравнений примет вид

Выразив силу натяжения из одного уравнения, и подставив в другое, получим формулу для ускорения движения грузов
Эффективная сила, действующая на рассматриваемую систему равна:
 .
.
Подставим массы М1 и М2, и пренебрегая массой μ, получим

Затем снимаем с правого груза перегрузок m3 и перевешиваем его на левый груз. При этом общая масса системы не изменится, а эффективная сила, действующая на систему, станет
 .
.
Получим для сил соотношение
 . (1)
. (1)
Теперь получим отношение для ускорений. Так как равнодействующие силы F1 и F2 в обоих случаях отличны от нуля, то движение системы равноускоренное: при этом она проходит равные пути, имея каждый раз нулевую начальную скорость. Используя формулу кинематики для нахождения пути равноускоренного движения с нулевой начальной скоростью
 ,
,
получим, что ускорения
 ,
, 
А отношение ускорений равно обратному отношению квадратов соответствующих времен падения грузов:
 . (2)
. (2)
В настоящей работе предлагается по результатам опытов определить отношение сил по формуле (1) и отношение ускорений по формуле (2), а затем сравнить эти результаты.
Очевидно что значения С1 и С2 не будут абсолютно одинаковыми. Чтобы считать их одинаковыми необходимо, чтобы разница между С1 и С2 была меньше погрешности их измерений
 . (3)
. (3)
Порядок выполнения работы
Порядок выполнения работы приводится для установки 2а. При выполнении работы на установке 2б необходимо учесть, что опускаться будет правый груз, а управление электромагнитом и секундомером осуществляется клавишами «Сеть», «Пуск» и «Сброс».
1. Компенсировать силу трения, добавляя груз пластилина (μ) к левому грузу, укрепленному на нити (для 2б – добавляя в полость правого цилиндра песок). Силу трения можно считать скомпенсированной, если оба груза – цилиндра, теперь уже с несколько разными массами, самопроизвольно не приходят в движение; в то же время при подталкивании одного из них они будут двигаться равномерно с той скоростью, которую им сообщили. (Замечание: пластилин или песок можно заменить дополнительным перегрузком, масса которого в дальнейшем не учитывается.)
2. Положить на левый груз перегрузки m1 и m2, а на правый груз m3 и m4. Подбираем четыре груза так, чтобы (m1 + m2) была немного больше (m3 + m4).
3. Поднимаем левый груз и фиксируем нить, включая электромагнит ключом К1. Высота, с которой падает груз, при всех опытах должна оставаться неизменной.
4. Разомкнуть электромагнит и включить секундомер ключом К2. Определить время движения системы t1. Результаты измерений занести в Таблицу 1.
5. Опыт повторить 5 раз, выполняя пункты 3-4.
6. Снять с правого груза перегрузок m3 (перегрузок меньшей массы) и перевесить его на левый груз.
Таблица 1
| № | m1, кг | m 2, кг | m 3, кг | m 4, кг | t 1, с | 
| 
| t 2, с | 
| 
|
| 1 2 3 4 5 | ||||||||||

| 
| 
| 
| |||||||
7. Выполнить пункты 3-4, определяя время движения системы t2. Опыт повторить 5 раз. Результаты измерений занести в Таблицу 1.
8. Записать массы перегрузков в таблицу. (Замечание: если масса перегрузков неизвестна, то необходимо произвести взвешивание.)
9. По формуле (1) вычислить отношение сил С1, подставляя в формулу (1) значения масс перегрузков
 .
.
10. Вычислить погрешности для массы перегрузков. Если измерения массы не производились, то Dm берется равной половине наименьшего разряда точности, представленного в числе m (например: дана масса груза 12,7 г, то его погрешность следует принять равной Dm = ±0,05 г). Перегрузки в работе измерены с одинаковой точностью, т.е. Dm для них одинакова.
11. Вычислить погрешность косвенных измерений С1 по формуле:


12. По формуле (2) вычислить отношение ускорений С2, подставляя в формулу (2) средние значения времен  и
и 
 .
.
13. Рассчитайте средние значения времени опускания грузов, и квадраты разностей времени падения грузов с перегрузками и запишите в Таблицу 1.
14. Вычислить систематическую, случайную и суммарную погрешности t1 и t2 по формулам из лаб. работы №1.
15. Вычислить относительную погрешность С2 по формуле:
 .
.
16. Вычислить погрешность косвенных измерений С2 по формуле:
 .
.
17. Записать доверительные интервалы  и
и  .
.
18. Проверить неравенство (3). Чтобы неравенство было справедливо необходимо, чтобы разница между С1 и С2 была меньше общей погрешности их измерений
.
В этом случае можно считать, что С1 и С2 равны друг другу и закон
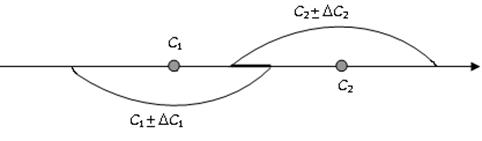
Рис. 4
Ньютона выполняется. Результат можно представить графически, отложив доверительные интервалы и на числовой оси (рис. 4). Если неравенство справедливо, то на рисунке будет наблюдаться область перекрытия доверительных интервалов С1 и С2.
Дата добавления: 2022-12-03; просмотров: 206; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!