Взаимосвязанный электропривод.
Лекция № 6
Регулирование угловой скорости электропривода переменного тока.
Частоту вращения ротора АД можно регулировать изменением:
1) частоты тока в обмотке статора f1 ;
2) числа пар полюсов в обмотке статора p ;
3) скольжения s.
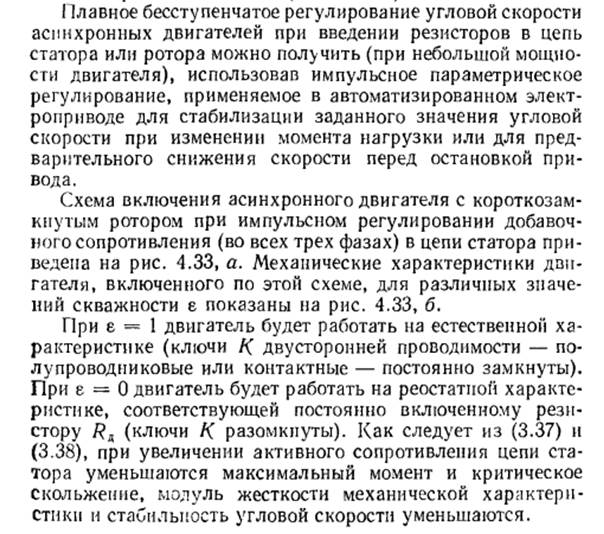
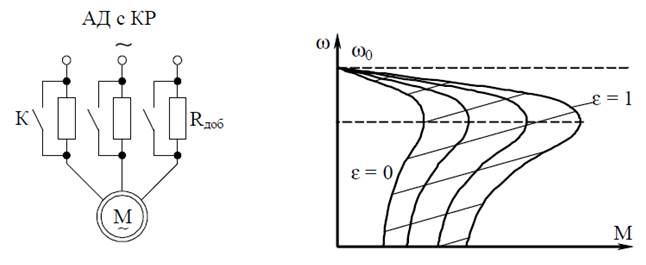
Реостатно-импульсное регулирование.
Недостатки реостатного регулирования:
1. Регулирование осуществляется вниз от основной скорости.
2. Ступенчатое регулирование скорости.
3. Невысокое быстродействие.
4. Большие потери энергии.
Используется в приводах малой мощности в кратковременном режиме работы.
Применяется в приводе подъемно-транспортных устройств, вентиляторов, насосов малой и средней мощности (до 100 кВт).
|
Схема импульсного управления АД
с короткозамкнутым ротором
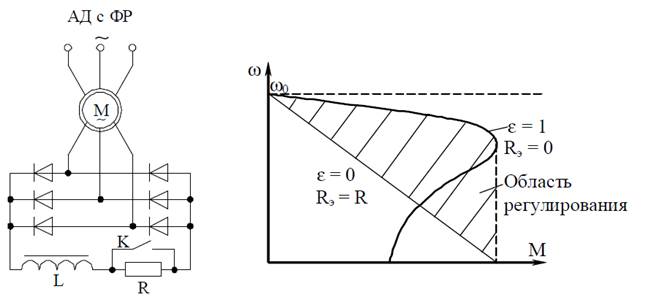
При импульсном регулировании лучше использование двигателя с фазным ротором. Дополнительный резистор включается через выпрямитель в роторную цепь последовательно со сглаживающим реактором. Включения резистора происходят с помощью ключа.
Преимущество в том, что регули рование может обеспечить максимальный момент во всем диапазоне изменения скорости.
|
|
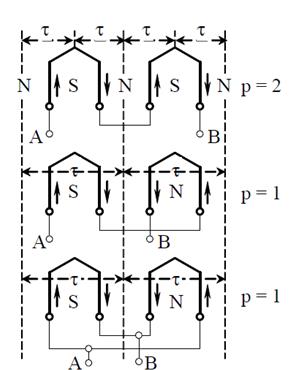
Регулирование переключением числа пар полюсов.
|
|
|
Варианты переключения могут быть различными. Электромагнитны момент АД пропорционален магнитному потоку, который обратно пропорционален числу витков обмотки.
Различные способы переключения дают разное число витков обмотки в фазе, поэтому получаются различные характеристики и условия регулирования.

 | |||
 | |||
1. Переключение обмотки дает изменение мощности и момента.
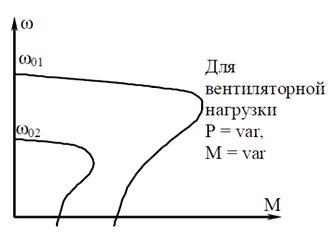
2. Сохраняется величина максимального момента.
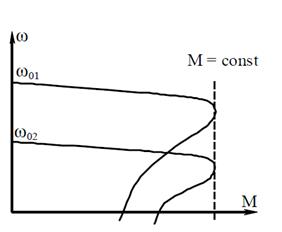
3. Сохраняется постоянство мощности при регулировании.

Частотное регулирование.
Если при неизменном напряжении изменять частоту, поток будет изменяться обратно пропорционально частоте. При уменьшении частоты поток возрастет и это приведет к насыщению стали машины и резкому увеличению тока намагничивания, что вызовет нагрев машины. Если увеличить частоту, то поток уменьшится и снизится крутящий момент двигателя.
Строгое выполнение закона не обеспечивает постоянства максимального момента, т.к. при снижении частоты активное сопротивление обмотки статора становится соизмеримым с реактивным и момент снижается.
Способ считается экономичным и эффективным, но требует преобразователя частоты.
|
|
|
Рассмотрим механические характеристики при различных законах регулирования выше и ниже номинальной частоты питающего напряжения.

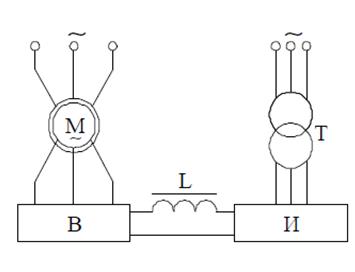
Каскадные системы
Асинхронно-вентильный каскад. Часть мощности скольжения возвращается в ту же сеть через инвертор и согласующийся трансформатор.
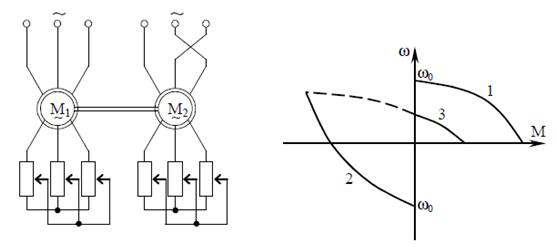
Взаимосвязанный электропривод.
Двухдвигательный привод обеспечивает устойчивую работу при низких скоростях. М1 работает в режиме двигателя, М2 – в режиме противовключения, их валы жестко механически связаны. Результирующая характеристика 3 на выходе получается в результате сложения характеристик 1 и 2.
|
|
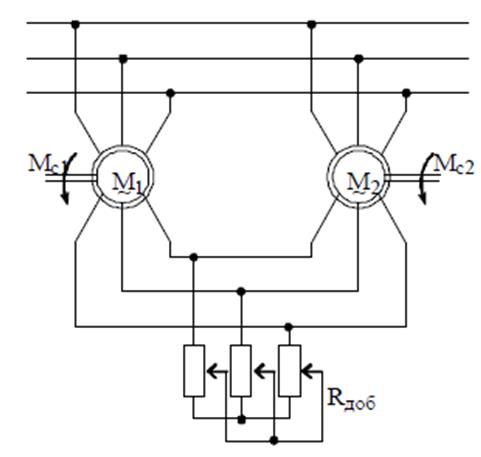
Рабочий электрический вал. Статоры М1 и М2 включены на одну сеть, фазные роторы включены встречно, параллельно им включены регулируемые резисторы.
При R = 0 электрический вал превращается в независимые АД.
Если нагрузки одинаковые, двигатели вращаются синхронно.
Если нагрузки разные, в роторной цепи появляется уравнительный ток, который будет подгружать двигатель с меньшей нагрузкой, и разгружать с большей.
|
|
|
Дата добавления: 2022-12-03; просмотров: 25; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!