Список использованных источников
Роботизированное создание 3D моделей в реальном времени
«3D SKY»
К.В. Руденко
Студент, кафедра системы обеспечение движения поездов,
КрИЖТ филиал ИрГУПС
Красноярск
Научный руководитель:
А.Р. Христинич
Доцент, кафедра системы обеспечение движения поездов,
КрИЖТ филиал ИрГУПС
Красноярск
Аннотация. В данной статье рассмотрена одна из модификаций и дополнений квадрокоптера для создания 3D моделей в реальном времени с помощью камеры и программы Agisoft PhotoScan .
Ключевые слова. Agisoft PhotoScan , 3 D модели, квадрокоптер, режим реального времени, онлайн трансляция.
На сегодняшний день моделирование объектов имеет большое развитие и распространение по всему миру, так же создание 3D моделей имеет широкое применение не только в создании видеоигр или мультиков, но и конечно в разных инженерных сферах. Обычно создание 3d модели это трудоемкий процесс требующий внимательности, знания ПО и четкого понимания физического процесса создаваемой модели.
Мы предлагаем упростить задачу моделирования модифицировав квадрокоптер и связать его с программным обеспечением Agisoft PhotoScan.
Agisoft PhotoScan - ведущее приложение для обработки цифровых изображений и создания трехмерных моделей.
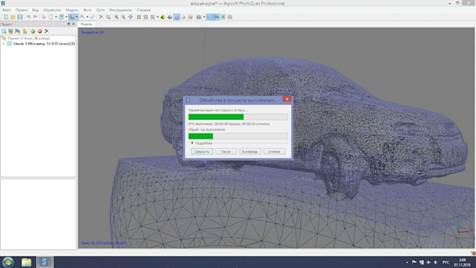
Рисунок 1 – Окно работы Agisoft PhotoScan
Идея заключается в онлайн трансляции и её записи с квадрокоптера на компьютер. Видео приходящее на компьютер сохраняется в оригинале и сразу переходит в программу Agisoft PhotoScan , далее в ПО отснятый материал конвертируется в множество фотографий (мы можем самостоятельно выбирать частоту съемки / количество кадров). Далее множество фотографий обрабатывается программой и создается модель.
|
|
|
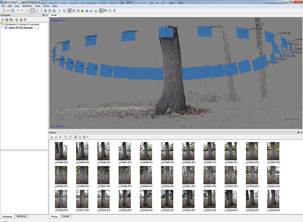
Рисунок 2 – Окно работы с кадрами
Проблема проекта заключается в приобретении видеокамеры для высококачественной съемки, а также всенаправленных антенн для хорошего приема и передачи сигнала.
В августе 2020 года была проведена экспериментальная возможность проекта на квадрокоптере S500 с использованием камеры Runcam Split Mini.

Рисунок 3 – Камера Runcam Split Mini
Основные характеристики камеры:
· Запись FOV 130 ° / FOV 165 °
· Разрешение видео: 1080 @ 60 кадров в секунду / 1080 @ 30 кадров в секунду / 720 @ 60 кадров в секунду
· Видеофайлы: MOV
· NTSC (720 * 480) / PAL (720 * 576) переключаемый
· Интерфейс: Micro USB / UART
· Max Micro SD 64G (рекомендуется класс 10 / UHS-I / UHS-II)
· Расстояние между монтажными отверстиями: 20 * 20 мм
· Размеры: печатная плата 27 * 29 мм / модуль объектива 19 * 19 мм
· Источник питания: DC 5-17V / DC 5V (USB)
· Потребляемый ток: 650ма @ 5В / 270ма @ 12В
· Вес: 15 г
|
|
|
Рисунок 4 Квадрокоптер S500
Параметры квадрокоптера S500 
· Тип мультикоптера - квадрокоптер (4 винта)
· Максимальное время полета - 30 мин.
· Максимальная скорость полета - 7 м/с
· Поддержка карт памяти - есть
· Бесколлекторный двигатель - есть
· Управление - радиоканал
· Навигационная система - GPS
· Дальность управления по радиоканалу - 2500 м
· Автопилот - есть
· Емкость аккумулятора - 5000 мА·ч
· Напряжение аккумулятора - 14.8 В
· Вес квадрокоптера - 1445 г
Программное обеспечение при проведении опыта было лицензированное, но с ограничением и некоторые функциональные возможности не были доступны. Эксперимент был удачный в том, что работал сам алгоритм, описанный выше, но из-за плохих параметров камеры и не устойчивой передачи сигнала, камера вышла из строя, построив только часть объекта в низком качестве.
Так же в феврале 2020 года данный проект был отправлен в краевой фонд науки для спонсирования и дальнейшего развития.
Сейчас планируются испытания создать 3D модель шкафа в домашних условиях с использованием малогабаритного квадрокоптера MJX X101A c HD FPV камерой - X101A-4018.

Рисунок 5 - Квадрокоптера MJX X101A c HD FPV камерой - X101A-4018
Модель проста в использовании, имеет возможность для крепления нового оборудования, также может напрямую вести трансляцию с камеры на телефон, а при установленном на компьютере оборудовании и на компьютер.
|
|
|
В заключении можно сказать, что применение квадрокоптеров в 3D моделировании является актуальным и новым, так как модернизируется способ моделирования что ведет за собой и упрощение моделирования.
Список использованных источников
1. Землянов, Г. С. 3D-моделирование / Г. С. Землянов, В. В. Ермолаева. — Текст : непосредственный // Молодой ученый. — 2015. — № 11 (91). — С. 186-189. — URL: https://moluch.ru/archive/91/18642/ (дата обращения: 1.04.2021).
2. Лучшие квадрокоптеры 2017 года.[Электронный ресурс]. URL:https://buynbest.ru/best-drones-2017/ (дата обращения: 1.04.2021).
Дата добавления: 2022-07-02; просмотров: 19; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!