Радионавигация (наземный аналог спутниковых систем)
Радионавига́ция — область науки и техники, охватывающая радиотехнические методы и средства вождения автомобилей, кораблей, летательных и космических аппаратов, а также других движущихся объектов[1][2][3].
Применение радионавигационных методов и средств позволило увеличить точность прохождения маршрутов движущимися объектами и вывода их в заданный район, а также значительно повысить безопасность хождения судов и полетов самолетов в сложных метеорологических условиях. Объединение различных радионавигационных устройств в определенные системы в принципе позволяет обеспечить выполнение всех основных задач навигации. Однако в целях повышения надежности и безопасности вождения объектов в наиболее сложных условиях такие системы на практике используют совместно с нерадиотехническими средствами, например с инерциальной навигационной системой, с которыми они образуют комплексные (комбинированные) системы навигации.
по способу определения местоположения:
угломерные;
дальномерные;
разностно-дальномерные (гиперболические);
комбинационные.
по виду несущего информацию и измеряемого параметра радиосигнала.
Спутниковые системы позиционирования (наземный, спутниковый и пользовательские сегменты)
Спу́тниковая систе́ма навига́ции (англ. Global Navigation Satellite System, GNSS, ГНСС) — система, предназначенная для определения местоположения (географических координат) наземных, водных и воздушных объектов, а также низкоорбитальных космических аппаратов. Спутниковые системы навигации также позволяют получить скорости и направления движения приёмника сигнала. Кроме того, могут использоваться для получения точного времени. Такие системы состоят из космического оборудования и наземного сегмента (систем управления). В настоящее время только две спутниковые системы обеспечивают полное покрытие и бесперебойную работу для всего земного шара — GPS и ГЛОНАСС.
|
|
|
Принцип работы
Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
|
|
|
Метод измерения расстояния от спутника до антенны приёмника основан на том, что скорость распространения радиоволн предполагается известной (на самом деле этот вопрос крайне сложный, на скорость влияет множество слабопредсказуемых факторов, таких как характеристики ионосферного слоя и пр.). Для осуществления возможности измерения времени распространяемого радиосигнала каждый спутник навигационной системы излучает сигналы точного времени, используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем, и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
инерционные системы позиционирования
Инерциальная навигация — метод навигации (определения координат и параметров движения различных объектов — судов, самолётов, ракет и др.) и управления их движением, основанный на свойствах инерции тел, являющийся автономным, т. е. не требующим наличия внешних ориентиров или поступающих извне сигналов. Неавтономные методы решения задач навигации основываются на использовании внешних ориентиров или сигналов (например, звёзд, маяков, радиосигналов и т. п.).
|
|
|
Инерциальные навигационные системы (ИНС) имеют в своём составе датчики линейного ускорения (акселерометры) и угловой скорости (гироскопы или пары акселерометров, измеряющих центробежное ускорение). С их помощью можно определить отклонение связанной с корпусом прибора системы координат от системы координат, связанной с Землёй, получив углы ориентации: рыскание (курс), тангаж и крен. Угловое отклонение координат в виде широты, долготы и высоты определяется путём интегрирования показаний акселерометров. Алгоритмически ИНС состоит из курсовертикали и системы определения координат. Курсовертикаль обеспечивает возможность определения ориентации в географической системе координат, что позволяет правильно определить положение объекта. При этом в неё постоянно должны поступать данные о положении объекта. Однако технически система, как правило, не разделяется и акселерометры, например, могут использоваться при выставке курсовертикальной части.
|
|
|

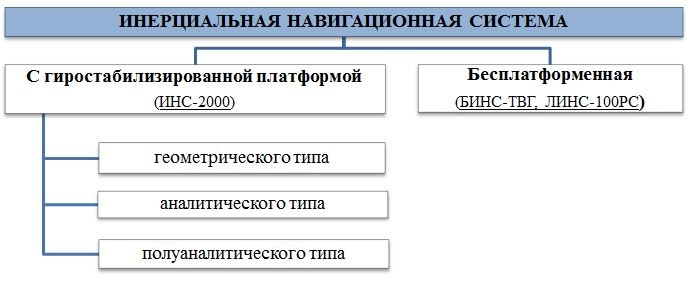
В платформенных ИНС взаимная связь блока измерителей ускорений и гироскопических устройств, обеспечивающих ориентацию акселерометров в пространстве, определяет тип инерциальной системы. Известны три основных типа платформенных инерциальных систем.
Инерциальная система геометрического типа имеет две платформы. Одна платформа с гироскопами ориентирована и стабилизирована в инерциальном пространстве, а вторая с акселерометрами — относительно плоскости горизонта. Координаты самолета определяются в вычислителе с использованием данных о взаимном расположении платформ.
В инерциальных системах аналитического типа и акселерометры, и гироскопы неподвижны в инерциальном пространстве (относительно сколь угодно далёких звёзд). Координаты объекта получаются в счетно-решающем устройстве, в котором обрабатываются сигналы, снимаемые с акселерометров и устройств, определяющих поворот самого объекта относительно гироскопов и акселерометров.
Полуаналитическая система имеет платформу, которая непрерывно стабилизируется по местному горизонту. На платформе имеются гироскопы и акселерометры.
В БИНС акселерометры и гироскопы жестко связаны с корпусом прибора. Передовой технологией в производстве БИНС является технология волоконно-оптических гироскопов (ВОГ), принцип действия которых основан на эффекте Саньяка. БИНС на базе таких гироскопов не имеет подвижных частей, абсолютно бесшумна, не требует специального обслуживания и имеет хорошие показатели наработки на отказ (до 80 000 часов у некоторых моделей) и малое энергопотребление (десятки Ватт). Технологии ВОГ пришли на смену лазерно-кольцевым гироскопам (ЛКГ), имеющим подвижные части и требующим периодического обслуживания по калибровке и замене износившихся узлов и деталей, а также с относительно высоким уровнем энергопотребления.
Дата добавления: 2022-06-11; просмотров: 28; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!