Расчет привода продольной подачи
Введение
3 глава является расчетной и в ней необходимо описать следующие пункты проекта:
1. Расчет двигателя (ДПТ/Шаговый двигатель/Асинхронный двигатель/Серводвигатель)
2. Расчет пневмо- /гидро- привода. (по необходимости в дипломе)
3. Расчет механической передачи (ШВП/ винт-гайка/ коробка передач/ и т.д.)
4. Расчет соединительных элементов (Подшипник/Шпон или Шлиц пазы/ Сварочный шов/ Заклепочное соединение/Болтовое соединение.)
5. Расчет на статические нагрузки конструкции.
Некоторые пункты можно игнорировать либо касаться их поверхностно, при этом остальные должны быть хорошо раскрыты. Рекомендуемый объем главы – 10-15 страниц.
Для примера расчётов 3й главы будет использовано устройство под названием “Автоматизированный анализатор культи”. Данное устройство предназначено для измерения формы и жёсткость культи (то, что остаётся после ампутации конечности). Для лучшего понимания строения данного устройства были взяты кинематические схемы из главы №2 – “Концептуальное решение”.
Кинематическая схема измерительной части анализатора культи
Кинематическая схема измерительной части анализатора культи представлена на рисунке 2.1.1
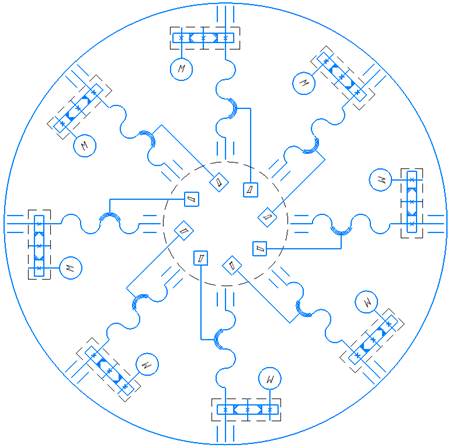
Рисунок 2.1.1 - Кинематическая схема измерительного кольца анализатора культи.
Из данной кинематической схемы мы можем понять, что измерительное кольцо состоит из 8 измерительных модулей, в каждом из которых присутствует двигатель, передающий вращающий момент с помощью редуктора на винтовую передачу, фиксируемую двумя подшипниками на плоскости измерительной части анализатора. К гайке скольжения винтовой передачи с помощью специального крепления присоединён тензодатчик, с помощью которого происходит измерение жёсткости ткани.
|
|
|
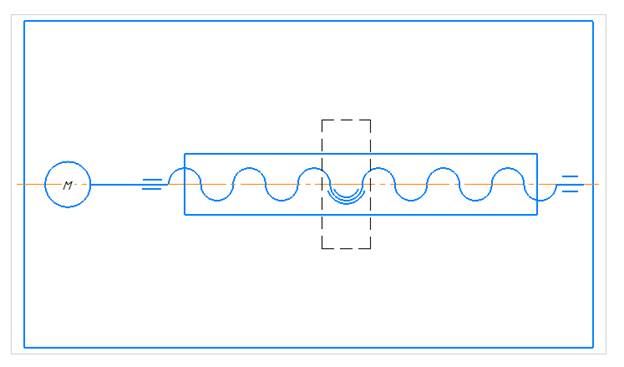
Рисунок 2.1.2 – Кинематическая схема модуля продольного перемещения
Модуль продольного перемещения на рисунке 2.1.2 позволяет изменят положение измерительного кольца в пространстве относительно культи пациента. Он состоит из двигателя и винтовой передачи, к гайке которой крепится всё измерительное кольцо анализатора.
Структура автоматизированного анализатора культи пациента
На рисунке 2.2.1 изображена структурная схема автоматизированного анализатора культи пациента. Из данной схемы мы можем понять, что анализатор состоит из:

Рисунок 2.2.1- структурная схема автоматизированного анализатора культи пациента.
1. Привода продольного перемещения, который позволяет двигать измерительную часть устройства в горизонтальном направлении. Код управления шаговым двигателем приведён в приложении А.
|
|
|
2. Восьми идентичных измерительных модулей, с помощью которых происходит анализ культи пациента. Программа управления измерительным модулем находится в приложении Б.
3. Глобальной системы управления, которая управляет данным устройством, позволяет координировать действия всех его частей и обрабатывать полученную информацию.
Расчет измерительного модуля
Проектирование модуля начинается с расчета и подбора передачи винт-гайка.
| Параметр | Значение | |
| 1 | Макс. сила вдавливания | 2 Н |
| 2 | Максимальная линейная скорость | 20 мм/с |
| 3 | Точность позиционирования | 0,1 мм |
| 4 | Максимальный ток эл. Двигателя | 1 А |
| 5 | Длина винта | 100 мм |
Таблица 3.1.1 – Требования к измерительному модулю.
Формула (1) используется для определения среднего диаметра резьбы винта по условию износостойкости:
| (1) |
где  – осевая сила, действующая на винт (Н);
– осевая сила, действующая на винт (Н);
 – коэффициент высоты профиля резьбы (Для трапец.
– коэффициент высоты профиля резьбы (Для трапец.  );
);
 – коэффициент высоты гайки (
– коэффициент высоты гайки (  );
);
 – допустимое давление в резьбе (
– допустимое давление в резьбе (  ).
).
Силы, действующие в винтовой передаче малы, поэтому в расчете мы получаем крайне низкий диаметр. Определяем диаметр винта в зависимости от его длины:

| (2) |
где  – длина винта (мм).
– длина винта (мм).
|
|
|
Исходя из доступных источников, был выбран винт диаметром  и шагом
и шагом  .
.
Необходимо определиться с соотношениями, позволяющими подобрать двигатель для линейного привода. По закону сохранения энергии:
| (3) |
где  – момент, создаваемый двигателем (Н*мм);
– момент, создаваемый двигателем (Н*мм);
 – угловая скорость вращения вала двигателя (рад/c);
– угловая скорость вращения вала двигателя (рад/c);
 – сила, передаваемая на гайку винтовой передачей (Н);
– сила, передаваемая на гайку винтовой передачей (Н);
 – линейная скорость движения гайки (мм/с).
– линейная скорость движения гайки (мм/с).
Выражаем линейную и угловую скорости через частоту вращения с помощью соотношений (4) и (5):

| (4) |

| (5) |
где  – частота вращения винта(об/мин);
– частота вращения винта(об/мин);
 – шаг резьбы винта (мм).
– шаг резьбы винта (мм).
По правилу пропорции, в формуле (3) переносим силу к моменту, угловую скорость к линейной, подставляем соотношения (4) и (5) и получаем формулу для определения минимального нужного момента на двигателе:
| (6) |
Необходимо учесть КПД передачи, для этого выводим формулу (7):
| (7) |
где  – КПД линейного привода (для передачи скольжения
– КПД линейного привода (для передачи скольжения  )
)

Формулу (8) можно использовать для нахождения необходимых оборотов двигателя:

| (8) |

Под указанные требования подходит шаговый двигатель StepperOnline11HS18-0674S, изображенный на рисунке 3.1.1
|
|
|
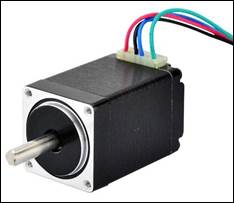
Рисунок 3.1.1 – Шаговый двигатель StepperOnline 11HS18-0674S
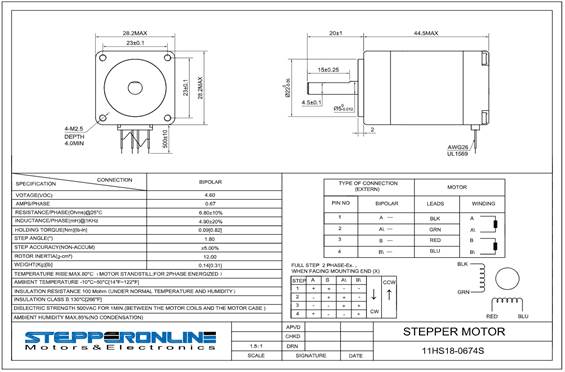
Рисунок 3.1.2 – Техническая спецификация шагового двигателя StepperOnline 11HS18-0674S
Его параметры:
● Напряжение питания  ;
;
● Угловой шаг  ;
;
● Максимальный ток  ;
;
● Момент на валу  ;
;
Необходимо определить его максимальную частоту вращения (об/мин), для этого будет использоваться формула (9):
| (9) |
где  – напряжение питания (В);
– напряжение питания (В);
– индуктивность обмоток (мГн);
 – ток удержания (А).
– ток удержания (А).
– КПД шагового привода.

При этом, зависимость момента от скорости похожего двигателя от компании FullingMotor, изображенная на рисунке 3.1.3, показывает, что при повышении питающего напряжения (вплоть до 24В) удается увеличить скорость вращения в несколько раз.
 |
Рисунок 3.1.3 – Диаграмма момент/скорость для FL28STH450674B
Вычислим точность позиционирования привода с винтовой передачей и шаговым двигателем с помощью формулы (10):

| (10) |
где – шаг винта (мм);
 – поворот винта на один шаг ШД (град).
– поворот винта на один шаг ШД (град).
По итогам сравнения параметров (табл. 3.1.2), было решено выбрать этот шаговый двигатель.
| Параметр | Значение | |
| Требуемое | Реальное | |
| Момент на валу | >1,27 Н*мм | 9,5 Н*мм |
| Скорость вращения | >600 об/мин | >600 |
| Точность позиционирования | <0,1 мм | 0,01 мм |
| Максимальный ток | <1 А | 0,67 А |
| Напряжение питания | - | 4,6 В (до 24 В) |
Таблица 3.1.2 – Сравнение параметров
Расчет привода продольной подачи
Продольный привод более требователен к мощности, силе и скорости, поскольку он должен перемещать тяжелый измерительный узел вдоль длинного винта.
| Параметр | Значение | |
| 1 | Передвигаемая масса | 10 кг |
| 2 | Максимальная линейная скорость | 20 мм/с |
| 3 | Точность позиционирования | 1 мм |
| 4 | Максимальный ток эл. Двигателя | 2 А |
| 5 | Длина винта | 500 мм |
Таблица 3.2.1 – Требования к продольному приводу.
Чтобы начать расчет ходового винта, необходимо знать силу тяжести измерительного узла, для этого воспользуемся формулой (11):

| (11) |
где  – масса предмета (кг);
– масса предмета (кг);
 – ускорение свободного падения (
– ускорение свободного падения (  ).
).

Кроме того, нужно знать действующие вдоль винта силы. У нас таких всего две – сила трения в направляющих и сила трения в соединении винт-гайка. Формула (12) позволяет получить силу трения между двумя поверхностями:

| (12) |
где  – коэффициент трения (безразмерный).
– коэффициент трения (безразмерный).
Коэффициент зависит от характера сил трения (движение, покой, скольжение), но его значения лежат в интервале  . Учитывая значительное трение в направляющих, большой вес узла и низкий КПД передачи, для расчетов примем
. Учитывая значительное трение в направляющих, большой вес узла и низкий КПД передачи, для расчетов примем  (максимум).
(максимум).

На рисунке 3.2 рассмотрен ходовой винт в виде балки с двумя опорами (подшипниками), с помощью этой схемы сил определим действующие в сечении винта моменты. Сила тяжести узла приложена к середине балки, т.к. в этом случае создается максимальный момент изгиба.
Составляем уравнения баланса сил и моментов: 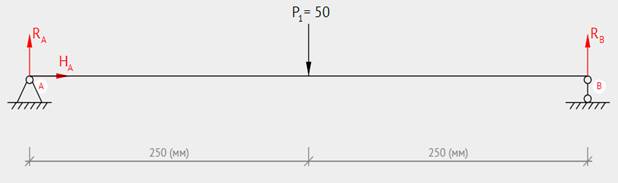
Рисунок 3.2.1 – Схема сил балки (винта)


Находим реакции опор:


Определяем максимальный момент в центре балки:

Рассчитаем диаметр винта исходя из максимального изгибающего момента по формуле (13):
| (13) |
где  – допускаемое напряжение на изгиб (
– допускаемое напряжение на изгиб (  .
.

Определим средний диаметр резьбы винта по условию износостойкости с помощью формулы (1):

Используем формулу (2) для предварительной, примерной оценки диаметра винта в зависимости от его длины:

Ориентируясь на это значение, и беря за основу диаметры, рассчитанные из условий прочности, выбираем ходовой винт с диаметром  и шагом резьбы
и шагом резьбы  .
.
Вычислим необходимый момент на шаговом двигателе с помощью формулы (7), КПД принимаем очень малым (~0,2):

Используем формулу (8) для нахождения необходимых оборотов двигателя:

Под рассчитанные параметры подходит шаговый двигатель 17HS19-1684S1 производства компании StepperOnline.

Рисунок 3.2.2 – Шаговый двигатель 17HS19-1684S1
Важные параметры:
● Напряжение питания  ;
;
● Угловой шаг ;
● Максимальный ток  ;
;
● Момент на валу  ;
;
Используем формулу (9) для получения максимальной частоты вращения (об/мин).
При этом, при повышении питающего напряжения (вплоть до 24В) удается увеличить скорость вращения в несколько раз, что значительно превышает минимально необходимую для нас.
Вычислим точность позиционирования привода с винтовой передачей и шаговым двигателем с помощью формулы (10):
Данный двигатель удовлетворяет всем требованиям, так же он имеете небольшие габариты. По итогам сравнения параметров, было решено выбрать этот ШД для продольного привода.
| Параметр | Значение | |
| Требуемое | Реальное | |
| Момент на валу | >159 Н*мм | 450 Н*мм |
| Скорость вращения | >300 об/мин | >300об/мин |
| Точность позиционирования | <1 мм | 0,02 мм |
| Максимальный ток | <2 А | 1,68 А |
| Напряжение питания | - | 2,8 В (до 24 В) |
Таблица 3.2.2 – Сравнение параметров.
Расчёт передачи винт гайка
Основным критерием работоспособности передачи винт–гайка является износостойкость резьбы. Условие износостойкости резьбы винта и гайки записывается следующим образом (14):

| (14) |
●  – средний диаметр резьбы;
– средний диаметр резьбы;
●  – рабочая высота профиля резьбы;
– рабочая высота профиля резьбы;
●  – число витков резьбы гайки;
– число витков резьбы гайки;
●  допускаемое давление в резьбе;
допускаемое давление в резьбе;
Этот расчет выполняется как проверочный. Так как тело винта одновременно подвергается сжатию (растяжению) и кручению, то, согласно энергетической теории, условие прочности винта записывается так (15):
| (15) |
Здесь

| (16) |

| (17) |

Далее переходим к расчёту гайки.
Высота гайки  ;
;
Наружный диаметр D определяется из условия ее прочности на растяжение и кручение (18):
| (18) |
где  ;
;
d – наружный диаметр резьбы.
Отсюда

| (19) |
Расчёт подшипников качения
Подшипники качения подбирают по статической грузоподъемности или заданной долговечности.По статической грузоподъемности выбирают подшипники, у которых угловая скорость вращающегося кольца не превышает 1 об/мин ≈ 0,1 рад/с. В нашем случае подшипники будет вращаться примерно со скоростью 1000об\мин. Эмпирическим путём были подобраны подшипники шариковые 608ZZ представленные на рисунке 3.4.1.

Рисунок 3.4.1 – подшипник 608ZZ.
Проверим номинальную долговечность подшипников по формуле (20):
 где p = 3 для шарикоподшипников;
где p = 3 для шарикоподшипников;
 динамическая грузоподёмность; динамическая грузоподёмность;
 эквивалентная нагрузка. эквивалентная нагрузка.
 Полученная долговечность данных подшипников нас полностью устраивает, учитывая, что значительная часть подшипников будет иметь фактическую долговечность значительно более высокую, чем расчетная
Полученная долговечность данных подшипников нас полностью устраивает, учитывая, что значительная часть подшипников будет иметь фактическую долговечность значительно более высокую, чем расчетная
| (20) |
Дата добавления: 2022-01-22; просмотров: 60; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!