Метод обратных итераций для поиска собственных векторов
Метод обратных итераций предназначен для поиска собственного вектора xi, когда соответствующее собственное значение l i известно с некоторой погрешностью. Обозначим через  возмущенное собственное значение, тогда, поскольку
возмущенное собственное значение, тогда, поскольку  , постольку уравнение
, постольку уравнение  имеет в качестве решения тривиальное, т.е. xi = 0.
имеет в качестве решения тривиальное, т.е. xi = 0.
Возьмем произвольный вектор b и рассмотрим систему:
 . (20)
. (20)
Определитель системы (20) отличен от нуля, поэтому система имеет единственное решение. Покажем, что это решение близко к собственному вектору xi, соответствующему собственному значению l i.
Ограничимся случаем, когда матрица n-го порядка A имеет n линейно-независимых собственных векторов xj, j = 1,…,n. В этом случае собственные векторы образуют базис, по которому можно разложить векторы x и b из (20), т.е.
 . (21)
. (21)
После подстановки (21) в (20) и при учете того, что  , находим
, находим
 . (22)
. (22)
Поскольку система собственных векторов xj, j = 1,…,n линейно-независима, постольку  , т.е.
, т.е.
 . (23)
. (23)
Согласно формуле (23), один из коэффициентов разложения x j велик при  . Это обстоятельство является решающим в методе обратных итераций. Уточним его для нескольких случаев.
. Это обстоятельство является решающим в методе обратных итераций. Уточним его для нескольких случаев.
Случай №1. Пусть собственное значение l i является простым, тогда среди коэффициентов разложения  , согласно (23), коэффициент
, согласно (23), коэффициент  является большим, т.е. вектор x с точностью до нормировки близок вектору xi.
является большим, т.е. вектор x с точностью до нормировки близок вектору xi.
|
|
|
Таким образом, согласно (23), в методе обратной итерации собственный вектор отыскивается тем лучше, чем точнее известно соответствующее собственное значение. Если собственное значение известно слишком грубо или вектор b выбран неудачно так, что x и xi отличаются значительно, организуют итерационный процесс в следующем виде:
 .
.
Расчеты показывают, что итерационный процесс сходится достаточно быстро (достаточно одной двух итераций), при этом на каждом шаге рекомендуется нормировать  .
.
Случай №2. Пусть собственное значение l i является кратным, кратности p > 1 и ему соответствует p линейно-независимых собственных вектора x1,…,xp. В этом случае векторы x1,…,xp определяются неоднозначно, т.к. любая их линейная комбинация является собственным вектором. Действительно, имеем следующую цепочку верных равенств
 ,
,
т.е. система векторов x1,…,xp порождает подпространство, в котором можно выбрать произвольный базис. Векторы, составляющие выбранный базис, могут быть рассмотрены в качестве искомых собственных векторов.
|
|
|
В этом случае, согласно (23), в разложении вектора x будут усилены несколько компонент x1,x2,…,x p, причем в одинаковой степени, т.е. вектор x будет линейной комбинацией векторов x1,…,xp. Чтобы найти все линейно-независимые векторы x1,…,xp, необходимо применить метод обратных итераций для p линейно-независимых векторов b1,…,bp.
Случай №3. Пусть собственное значение l i является кратным, кратности p > 1 и ему соответствует q (q < p) линейно-независимых собственных вектора x1,…,xq. В этом случае также применим метод обратных итераций в форме предыдущего случая. Единственное отличие состоит в том, что среди векторов обратной итерации x(k), соответствующих правым частям bk, лишь q векторов являются линейно-независимыми, что выясняется при использовании процедуры ортогонализации.
Количество арифметические операций в методе обратных итераций складывается из нахождения собственного вектора » n3 операций, число же собственных векторов » n , т.е. всего » n4 операций. Таким образом, при больших n метод неэкономичен, но при n небольших (в пределах нескольких сотен) он вполне приемлем, т.к. прост, универсален и устойчив.
На листинге_№5 приведен код программы для поиска собственных векторов матрицы, у которой все собственные значения простые. Кроме того, собственные значения считаются известными, быть может, и с некоторой погрешностью. В качестве примера матрицы берется трехдиагональная матрица Q (18) из предыдущего пункта.
|
|
|
Листинг_№5
%Программа поиска собственных векторов матрицы
%с помощью метода обратной итерации на примере
%трехдиагональной матрицы
%очищаем рабочее пространство
clear all
%определяем максимальный порядок матрицы A=Q
nmax=200;
%задаем параметр матрицы A=Q
q=0.1;
%организуем цикл расчетов собственных векторов
%для матриц различных порядков (от 1 до nmax)
for n=1:nmax
%формируем трехдиагональную матрицу
%A=Q порядка n
A=zeros(n);
for i=1:n
A(i,i)=1+2*q;
end
for i=2:n
A(i,i-1)=-q;
end
for i=1:(n-1)
A(i,i+1)=-q;
end
%цикл расчета собственных векторов методом
%обратной итерации
for k=1:n
%определяем собственное значение
lambda(k)=1+4*q*sin((pi*k)/(2*(n+1)))^2;
%возмущаем собственное значение
lambda(k)=lambda(k)+1e-5*randn;
%формируем правую часть системы уравнений
%метода обратной итерации
b=randn(n,1);
%организуется итерационный процесс метода
%обратной итерации с тремя итерациями
x0=b;
for j=1:3
%решаем систему обратной итерации
x1=(A-lambda(k)*eye(n))\x0;
|
|
|
x0=x1/norm(x1);
end
%формируется матрица, в которой столбцами
%являются собственные вектора матрицы A=Q
for j=1:n
ev(j,k)=x0(j);
end
end
%оценивается точность найденных собственных
%векторов для каждого порядка матрицы
error(n)=0;
for k=1:n
error(n)=error(n)+...
norm((A-lambda(k)*eye(n))*ev(:,k));
end
end
%рисуется зависимость погрешности вычисления
%собственных векторов от порядка матрицы
plot(1:nmax,error);
На рис.5 приведена зависимость итоговой ошибки численной оценки собственных векторов методом обратной итерации от порядка матрицы. Ошибка оценивалась по формуле error =  . Анализ графика показывает, что ошибка вполне удовлетворительна вплоть до порядка матрицы n = 200.
. Анализ графика показывает, что ошибка вполне удовлетворительна вплоть до порядка матрицы n = 200.
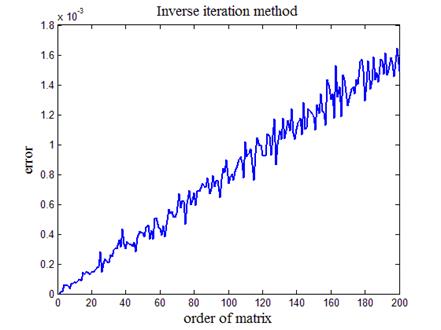
Рис.5. Зависимость численной оценки собственных
векторов от порядка матрицы
Метод отражения
Современные экономичные и устойчивые методы нахождения всех собственных значений основаны на приведении матрицы преобразованиями подобия к той или иной упрощенной форме. Такой упрощенной формой может быть треугольная матрица (верхняя или нижняя), почти треугольная, трехдиагональная или другая форма, для которой проблема собственных значений легко решается.
В данном разделе рассмотрим метод отражений, позволяющий любую матрицу преобразовать к почти треугольной форме за (10/3)n3 арифметических действий, а эрмитову матрицу к трехдиагональной форме за (4/3)n3 арифметических операций. Поскольку поиск собственных значений трехдиагональной матрицы экономичен (см. соответствующий пример выше), постольку метод отражений для эрмитовых матриц является одним из самых быстрых.
Введем операцию отражения в n-мерном пространстве относительно некоторой гиперплоскости G, проходящей через начало координат. Схема операции отражения вектора y относительно гиперплоскости G представлена на рис.6. Гиперплоскость характеризуется вектором нормали w. Произвольный вектор y раскладывается на две составляющие: параллельную вектору w и равную  и перпендикулярную вектору w и равную y∟ = y - w(w,y), где скалярное произведение (…,…) определено формулой:
и перпендикулярную вектору w и равную y∟ = y - w(w,y), где скалярное произведение (…,…) определено формулой:
 .
.
Рис.6. Схема отражения вектора y относительно
гиперплоскости G
При отражении вектора y его перпендикулярная составляющая y∟ не меняется, а параллельная составляющая меняет знак. В результате отраженный вектор z есть разность z = y∟ - y|| или
 . (24)
. (24)
Преобразование отражения (24) можно записать в канонической форме, вводя матрицу отражения R:
 (25)
(25)
или в координатной форме
 . (25¢)
. (25¢)
Перечислим без доказательства (доказательства просты и могут быть проделаны самостоятельно) основные свойства матрицы отражения, определенной в (25), (25¢):
· матрица эрмитова, т.е. R = RH;
· квадрат матрицы отражения равен единичной матрице, т.е. R2 = E или, в другой форме, матрица отражения равна своей обратной R = R-1;
· из предыдущих двух пунктов следует, что матрица отражения является унитарной, т.к. верно равенство RH = R-1.
Последнее свойство особенно важно в методе отражения, поскольку известно, что при преобразованиях подобия с помощью унитарной матрицы свойство эрмитовости сохраняется. По этой причине, если в рамках метода отражения удастся привести матрицу к почти треугольной форме, то, в силу сохранения свойства эрмитовости, матрица будет трехдиагональной.
Покажем, что для произвольной матрицы можно подобрать последовательность подобных преобразований отражения, которые приведут матрицу к верхней почти треугольной форме. Будем считать, что уже обнулены первые q - 1 столбцов в нижней части матрицы. Разобьем полученную матрицу на клетки так, как это изображено на рис.7.
Рис.7. Иллюстрация процедуры приведения матрицы к почти
треугольной форме методом отражений
На рис.7 черные кружки содержат ненулевые элементы матрицы, а белые — нулевые. Клетка A1 уже приведена к почти треугольному виду, а у прямоугольной матрицы A3 последний столбец содержит ненулевые элементы. Обведенная группа черных кружков в клетке A3 обозначает те элементы матрицы, которые должны быть обнулены на q-м шаге.
Определим вектор  , описывающий матрицу отражения, которая после преобразования подобия обнуляет элементы матрицы, обведенные замкнутой линией на рис.7. В дальнейшем индекс q, у вектора w будет для простоты опущен. Вектор w определим в виде:
, описывающий матрицу отражения, которая после преобразования подобия обнуляет элементы матрицы, обведенные замкнутой линией на рис.7. В дальнейшем индекс q, у вектора w будет для простоты опущен. Вектор w определим в виде:
 . (26)
. (26)
Согласно (26), матрица отражения (25), (25¢) может быть представлена в следующем блочно-диагональном виде:
 . (27)
. (27)
Из курса линейной алгебры известно, что, если матрицы представлены в одном и том же блочно-диагональном виде, то их перемножение можно осуществлять по обычным правилам матричного умножения, считая матричные клетки как обычные матричные элементы. Осуществим преобразование подобия с матрицей отражения (27), тогда
 . (28)
. (28)
Клетка A1 в (28) уже приведена к почти треугольной форме. Осталось рассмотреть клетку WA3 и добиться ее обнуления. Непосредственной проверкой можно убедиться в том, что в матрице WA3 все столбцы нулевые, кроме последнего столбца, который можно представить в виде:
 , (29)
, (29)
где
 . (30)
. (30)
Исходя из представления (29) добьемся того, чтобы все элементы столбца, кроме самого верхнего обратились в нуль. Это сделать легко, положив
 . (31)
. (31)
Из (29) найдем также wq +1, т.е.
 . (32)
. (32)
Подставляя (31), (32) в условие нормировки (w,w) = 1, находим
 . (33)
. (33)
С другой стороны, подставляя (31), (32) в (30), находим
 . (34)
. (34)
Согласно (34), можно заметить, что  вещественное выражение, а после вычитания уравнения (34) из (33), найдем
вещественное выражение, а после вычитания уравнения (34) из (33), найдем
 . (35)
. (35)
После подстановки (35) в (34), имеем
 . (36)
. (36)
Второй член в правой части (36) должен быть вещественным, т.е.
 (37)
(37)
где
 (38)
(38)
Поскольку в формулах (31), (32) при определении вектора нормали к гиперплоскости отражения нам приходится делить на a, постольку выгодно выбрать нечетное значение k в формуле (37), чтобы не столкнуться с возможностью деления на нуль или близкое к нулю значение. В итоге можно получить
 . (39)
. (39)
Заметим, что матрица отражения (27) не меняется при замене  , при этом a, согласно (30), заменяется на
, при этом a, согласно (30), заменяется на  . С учетом неопределенности аргумента числа a, формулу (39) в оценке a можно считать завершающей.
. С учетом неопределенности аргумента числа a, формулу (39) в оценке a можно считать завершающей.
Если преобразуется чисто вещественная матрица A, то переход от (36) к (39) сводится к преобразованию:
 . (40)
. (40)
Формулы (31), (32), (35), (38) — (40) полностью определяют преобразование подобия от матрицы A к матрице B с помощью матрицы отражения R.
Приведенная процедура разобрана для случая обнуления нижней части q-го столбца. Всего необходимо обработать n - 2 первых столбцов матрицы, т.е. q = 1,2,…,n - 2, чтобы произвольная матрица A преобразовалась в верхнюю почти треугольную матрицу S, а эрмитова — в трехдиагональную. Если  — матрицы отражения, последовательно преобразующие матрицу A к верхнему почти треугольному (трехдиагональному) виду, то
— матрицы отражения, последовательно преобразующие матрицу A к верхнему почти треугольному (трехдиагональному) виду, то
 .
.
Как уже упоминалось ранее, после приведения матрицы к верхней почти треугольной (трехдиагональной) форме легко можно найти собственные значения и собственные вектора yi. Собственные значения преобразованной матрицы S такие же, как и у матрицы A, а собственные вектора вычисляются по формуле  .
.
Подсчет числа арифметических операций при экономном использовании метода отражения дает следующие оценки для эрмитовой матрицы: на подсчет всех собственных значений требуется  операций, для нахождения всех собственных векторов — еще
операций, для нахождения всех собственных векторов — еще  . Для решения полной проблемы собственных значений эрмитовых матриц метод отражений один из самых быстрых и устойчивых методов.
. Для решения полной проблемы собственных значений эрмитовых матриц метод отражений один из самых быстрых и устойчивых методов.
В пакете MATLAB приведение матрицы к верхней почти треугольной форме с помощью преобразования подобия унитарной матрицей осуществляется функцией hess. Это же преобразование в пакете MATLAB называется разложением Хессенберга. Типичное обращение к разложению Хессенберга выглядит следующим образом: [R,S] = hess(A), A = RSRH.
На листинге_№6 приведен код программы преобразования произвольной матрицы к верхней почти треугольной форме с помощью метода отражения по формулам (27), (28), (31), (32), (35), (38) — (40). Вычисляется время работы центрального процессора по преобразованию матрицы в зависимости от ее порядка и эта зависимость сравнивается с аналогичной, но при использовании встроенной в MATLAB функции hess, которая осуществляет такое же преобразование матрицы и тем же методом отражения.
Листинг_№6
%Программа приведения матрицы к верхней почти
%треугольной форме методом отражения
%очищаем рабочее пространство
clear all
%определяем максимальный порядок матрицы
nmax=403;
%организуем цикл преобразований матриц разного
%порядка
for n=3:20:nmax
%запоминаем начало работы процессора при
%преобразовании матрицы
t0=cputime;
%создаем случайную матрицу
A=randn(n);
%определяем цикл q-2 подобных
%преобразований отражения
for q=1:(n-2)
u=0;
for i=(q+1):n
u=u+abs(A(i,q))^2;
end
%согласно теории вычисляем b(q+1,q)
bq1q=sqrt(u);
alpha=sqrt(2*bq1q*(bq1q+abs(A(q+1,q))));
%формируем вектор нормали w к плоскости
%отражения
w=zeros(n,1);
w(q+1)=(A(q+1,q)+bq1q*sign(A(q+1,q)))/alpha;
for i=(q+2):n
w(i)=A(i,q)/alpha;
end
%вычисляем матрицу отражения R при текущем
%значении вектора w
for i=1:n
for j=1:n
if i==j
R(i,j)=1-2*w(i)*w(j);
else
R(i,j)=-2*w(i)*w(j);
end
end
end
%осуществляем подобное преобразование матрицы A
%с помощью матрицы отражения R
B=R*A*R;
A=B;
end
%определяем время потраченное центральным процессором
%на преобразование матрицы A к верхнему почти
%треугольному виду методом отражения
t(n)=cputime-t0;
%аналогичную процедуру оценки времени центрального
%процессора проводим при использовании разложения
%Хессенберга с помощью функции hess
t0=cputime;
B=hess(randn(n));
thess(n)=cputime-t0;
end
%рисуем в одном окне график зависимости времени работы
%центрального процессора по преобразованию матрицы от
%порядка матрицы для нашей программы (маркер *) и для
%встроенной в MATLAB программы hess (марке "пентаграмма")
plot(3:20:nmax,t([3:20:nmax]),'-*',...
3:20:nmax,thess([3:20:nmax]),'-p');
На рис.8 приведена итоговая пара кривых производительности центрального процессора компьютера. Видно, что наша программа заметно уступает по производительности встроенной в MATLAB функции. Этому есть объяснение. Преобразование подобия по формуле (28) осуществлено в программе листинга_6 не оптимально. Предлагается самостоятельно так модифицировать код программы, чтобы приблизиться к производительности встроенной функции hess.
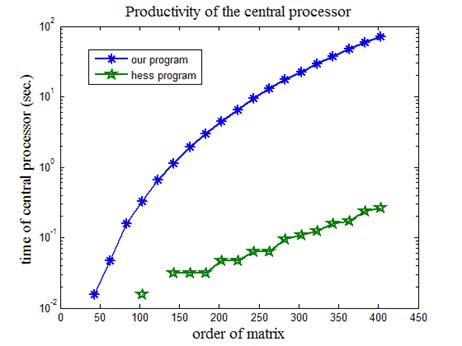
Рис.8. Сравнение производительности центрального
процессора для двух программ
Помимо метода отражения, используется также так называемый метод вращений[1]. И тот и другой методы относятся к прямым методам преобразования матриц к верхнему почти треугольному виду.
Наряду с прямыми методами разработаны и используются итерационные методы. К ним относится, например, метод Якоби, который преобразует эрмитову матрицу в диагональную с помощью преобразований вращения. В целом итерационные метод Якоби уступает по скорости методу отражений, его основное преимущество — надежность и единообразие вычисления всех собственных значений и собственных векторов. К итерационным методам относится также метод обобщенных вращений (развитый Эберлейн и В.В. Воеводиным), ортогональный степенной метод (предложен В.В. Воеводиным), треугольный степенной метод (предложен Бауэром), QR — алгоритм (предложен В.Н. Кублановской и Френсисом) основан на преобразовании матрицы к треугольной форме и ряд других алгоритмов.
Дата добавления: 2022-01-22; просмотров: 84; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!