Превращение свободного гироскопа в гирокомпас.
Тема 1.2.3. ТСС
Заочное. Лекция 4
Тема : «Гирокомпас на неподвижном основании и работа гирокомпаса на движущемся судне».
Задание :
1. Изучить материал лекции, законспектировать.
2. Ответить на контрольные вопросы. Отвечая на вопросы, сами вопросы необходимо записывать. Отвечать в виде текста.
Контрольные вопросы:
1. Что называется гирокомпасом ?
2. Что является общим принципом создания морского гирокомпаса ?
3. Какой гирокомпас получил название маятникового ?
4. Что представляет из себя чувствительный элемент в гирокомпасах типа «Курс»
5. Что называется девиациями гирокомпаса?
6. Перечислите, какие виды девиации гирокомпаса вы знаете?
Свободный гироскоп с технически достижимой точностью может хранить, т. е. удерживать заданное направление в пространстве, однако не может служить указателем курса, поскольку из-за вращения Земли непрерывно изменяет свое положение относительно географического меридиана и плоскости истинного горизонта. Как превратить его в гироскопический компас и добиться того, чтобы ось гироскопа оставалась все время в плоскости горизонта и отслеживала направление меридиана, т. е. направление на север. Эта задача решалась учеными много лет и потребовала глубоких теоретических исследований, экспериментальных и инженерных работ.
Во-первых, надо было обеспечить постоянную и достаточно высокую скорость вращения гироскопа, чтобы в необходимой степени проявлялись его свойства.
|
|
|
Во-вторых, потребовалось научиться сводить к минимуму трение в осях подвеса и тщательно балансировать ротор, чтобы снизить влияние вредных моментов от посторонних сил.
В-третьих, надо было найти техническое решение по устранению влияния качки, вибраций и скорости движения судна.
И, наконец, необходимо было научиться управлять гироскопом, т. е. заставить его главную ось двигаться с той же скоростью, с какой вращаются плоскости географического меридиана и истинного горизонта.
Первые схемы гироскопических компасов были предложены французским физиком Труве и американским физиком Гопкинсом в 1878 году. В Англии идеи Л. Фуко были использованы В. Томсоном: в 1884 году он предложил подвешивать гироскопическую систему в жидкости, что позволило уменьшить силы трения. Первый патент, относящийся к гироскопическому компасу, был выдан в 1886 году голландскому священнику Максиму Герарду Ван ден Босу.
Купивший этот патент немецкий электротехник и промышленник Вернер фон Сименс писал: «Сегодня я заключил договор с двумя голландцами об осуществлении их изобретения – компаса без магнита. Он состоит из вращающихся дисков, которые направляют плавающий в воде корпус точно на истинный полюс Земли. Естественно, что он совершенно не зависит от воздействия железа и от магнитных помех. Эта вещь наделает много шума». Однако купленный патент не оправдал надежд фон Сименса, и спустя восемь месяцев он вынужден был признать: «Ротационный компас также оказался иллюзией». Причинами неудач были недооценка инженерных сложностей создания прибора и некоторые ошибки, заложенные в его конструкции. Первый гироскопический компас для использования на море был разработан в 1908 году лейтенантом Балтийского флота М. Конокотиным. Однако он был подвержен сильному влиянию качки и также не нашел практического применения.
|
|
|
Модель гирокомпаса, пригодная к работе на судне в условиях качки, появилась лишь в 1913 году. Заслуга в его создании принадлежит немецкому философу и инженеру Герману Аншютц-Кемпфе. С этого момента начинается этап широкого внедрения гирокомпасов на морские суда и их интенсивного совершенствования. Успешному решению инженерных проблем создания гирокомпаса способствовали достижения в области электромеханики и разработка шарикоподшипников, которые стали использовать в осях подвеса гироскопа. Постоянную и высокую скорость вращения ротора удалось обеспечить благодаря гироскопу с электрическим приводом, созданному в 1865 году русским ученым Б. С. Якоби. В нем ротор гироскопа является одновременно и ротором электродвигателя. Заставить гироскоп следить за географическим меридианом можно, приложив к нему моменты, которые вызвали бы прецессию главной оси вращения ротора в нужном направлении и со скоростью, соответствующей составляющим угловой скорости вращения Земли. При этом используют явления вращения Земли и действия сил тяготения, а также два свойства гироскопа – устойчивость и прецессию.
|
|
|
Гирокомпасами называются гироскопические приборы, обладающие направляющим моментом и предназначенные для выработки курса судна и определения направлений на земные ориентиры и небесные светила. Для создания гирокомпаса необходима система, реагирующая на отклонение отсчетной оси от плоскости истинного меридиана и одновременно вырабатывающая управляющий момент для приведения отсчетной оси в плоскость истинного меридиана, т. е. удерживающая ее в этой плоскости. Эта система называется чувствительным элементом (ЧЭ) гирокомпаса.
В ЧЭ для обнаружения рассогласования их главной оси с плоскостью истинного меридиана применяются индикаторные устройства, реагирующие на отклонение главной оси от плоскости истинного горизонта и одновременно вырабатывающие управляющие моменты для уменьшения этого рассогласования.
|
|
|
Получение управляющих моментов в ЧЭ возможно двумя путями:
-смещение центра тяжести ЧЭ относительно точки подвеса вдоль вертикальной оси z;
-применением индикаторов отклонения главной оси ЧЭ от плоскости истинного горизонта, которые управляют датчиками, создающими управляющий момент по оси y ЧЭ.
Гирокомпасы с ЧЭ первого типа называются гирокомпасами с физическим маятником или гирокомпасами с непосредственным управлением (ГК с НУ), а с ЧЭ второго типа – гирокомпасами с косвенным управлением (ГК с КУ).
В свою очередь маятниковый эффект ЧЭ может быть достигнут либо понижением его центра тяжести относительно точки подвеса (гирокомпасы с твердым маятником), либо повышением центра тяжести за счет применения специальных сообщающихся сосудов (гирокомпасы с гидравлическим маятником). Наибольшее распространение получили отечественные гирокомпасы типа «Курс», в которых применяются ЧЭ с пониженным центром тяжести. По способу регулировки гирокомпасы делятся на апериодические (регулируемые) и неапериодические (нерегулируемые).
Превращение свободного гироскопа в гирокомпас.
Общим принципом создания морского гирокомпаса является наложение на свободный гироскоп управляющих моментов под действием которых его ось собственного вращения займет по отношению к Земле вполне определенное направление, совпадающее с линией N-S (на неподвижном судне), вокруг которой поворачивается плоскость истинного меридиана.
Если главную ось свободного гироскопа установить в плоскости меридиана, то с течением времени, вследствие вращения Земли, она будет уходить из этой плоскости, совершая относительно нее видимое движение (рис. 122).
Видимое движение точки S, обусловленное вращением Земли, будет совершаться по малому кругу S0 S S1, при этом главная ось гироскопа описывает конус вокруг оси Pn, Ps.
Таким образом, свободный гироскоп не может быть использован в качестве курсоуказателя по следующим причинам:
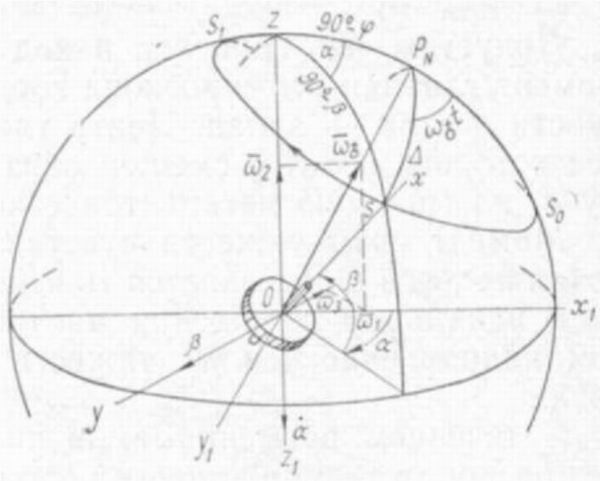
Рис. 122.
главная ось гироскопа, описывая конус вокруг оси мира, совершает колебание около плоскости меридиана;
свободный гироскоп не обладает направляющей силой, т. е., будучи отклоненным от плоскости меридиана, он не возвращается к ней.
Для того, чтобы превратить свободный гироскоп в гирокомпас, необходимо сообщить ему направляющий момент, который удерживал бы его главную ось в плоскости меридиана, подобно тому, как магнитный момент стрелок магнитного компаса удерживает картушку компаса в плоскости компасного меридиана.
Направляющий момент приобретается гироскопом благодаря ограничению одной из трех степеней свободы — степени свободы по оси Y—Y.
Наиболее простой способ этого ограничения — смещение центра тяжести гироскопа ниже точки подвеса.
Гирокомпас, у которого центр тяжести расположен ниже его точки подвеса, называется маятниковым гирокомпасом. Гироскопическая система (гироскоп и его подвес) — основной элемент гирокомпаса, она реагирует на земное вращение и поэтому называется чувствительным элементом.
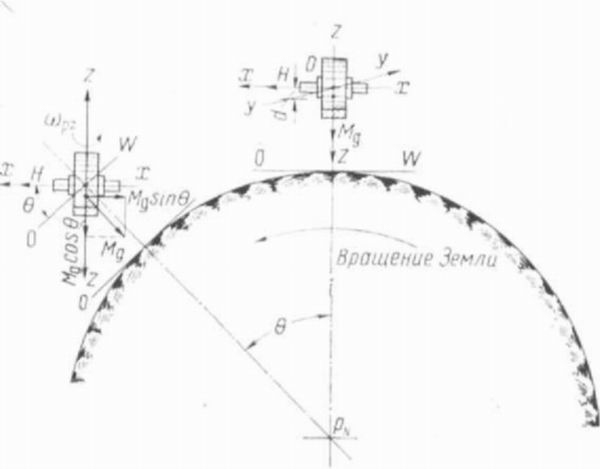
Рис. 123.
Рассмотрим принцип действия маятникового гирокомпаса, у которого чувствительный элемент состоит из одного гироскопа. На рис. 123 изображен вид на Землю со стороны северного полюса (плоскость земного экватора совпадает с плоскостью чертежа).
Допустим, что гироскоп находится на экваторе и в начальный момент главная ось гироскопа горизонтальна и направлена в плоскости восток — запад. Центр тяжести чувствительного элемента, вес которого P=M g смещен вниз от точки подвеса О на величину а, называемую метацентрической высотой.
Момент силы тяжести чувствительного элемента относительно точки подвеса О называется маятниковым моментом.
В начальном положении маятниковый момент равен нулю, так как направление силы тяжести проходит через точку подвеса.
С течением времени Земля повернется на некоторый угол в, и гироскоп окажется в новом положении.
При этом главная ось гироскопа, стремясь сохранить первоначальное заданное ей направление, отклонится от вращающейся в пространстве плоскости горизонта на тот же угол 0.
В этом положении направление силы тяжести не пройдет через точку подвеса, и к гироскопу прикладывается некоторый маятниковый момент

где B=Mg a — модуль маятникового момента гироскопа. Этот момент направлен на оси у—у. Под действием маятникового момента возникает прецессионное движение гироскопа вокруг оси z—z. Согласно правилу полюсов, полюс гироскопа будет двигаться к полюсу Земли Pn, т. е. к плоскости меридиана. Угловая скорость этой прецессии
Следовательно, гироскоп, у которого центр тяжести находится ниже точки подвеса, принципиально превращается в гирокомпас. При отклонении гироскопа от плоскости меридиана у него появляется направляющий момент, стремящийся привести его главную ось в плоскость меридиана.
Значение направляющего момента определяется формулой

где Q —кинетический момент гироскопа;
wo cos cр — горизонтальная составляющая земного вращения;
а — угол отклонения полюса гироскопа от плоскости меридиана;
wo — угловая скорость вращения Земли,.
Направляющий момент достигает максимального значения на экваторе при отведении главной оси гироскопа от меридиана на 90°. С увеличением широты направляющий момент уменьшается и на полюсе обращается в нуль. Поэтому на полюсе гирокомпас работать не может.
В гирокомпасах типа «Курс», используемых на судах морского флота, чувствительный элемент представляет собой герметически закрытый шар, называемый гиро сферой. Подвес гиросферы в поддерживающей жидкости обеспечивает ей возможность вращения вокруг всех трех осей.
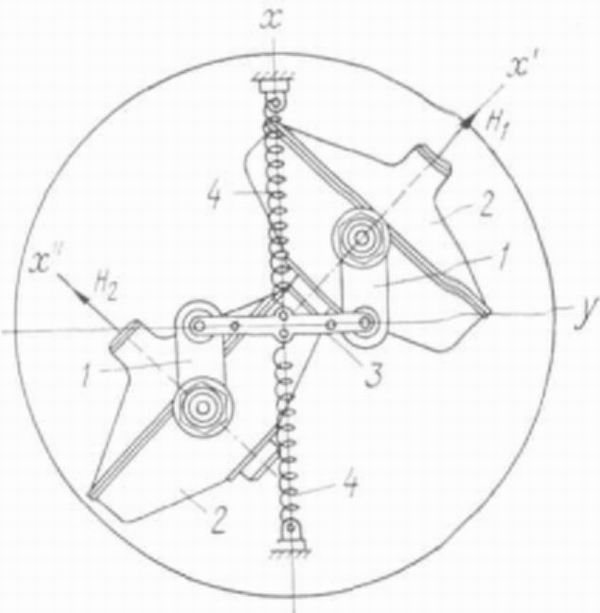
Рис. 124.
Для предупреждения вредного влияния качки гироскопическая система гиросферы состоит из двух гироскопов (рис. 124). Гироскопы 2 расположены внутри гиросферы под углом 90° друг к другу и под углом 45° к оси х (линии N—S гиросферы). Гироскопы скреплены кривошипами 1, связаны между собой спарником 3, а с оболочкой гиросферы — пружинами 4 и могут вращаться вокруг своих вертикальных осей. При изготовлении гиросферы подбирают гироскопы, у которых кинетические моменты H1 и Н2 одинаковы. Суммарный кинетический момент, создаваемый вращающимися роторами гиромоторов, направлен по оси x(N—S гиросферы) и oпределяется по формуле

Благодаря указанному соединению гироскопов между собой поведение гиросферы при вращении Земли будет аналогично поведению чувствительного элемента одногироскопного маятникового гирокомпаса.
Незатухающие и затухающие колебания гирокомпаса. Подробные исследования движения главной оси чувствительного элемента гирокомпаса после того, как он прецессионным движением начал стремиться к плоскости меридиана, показывают, что главная ось гирокомпаса будет совершать так называемые незатухающие колебательные движения около меридиана. Траектория движения представляет собой сильно сжатый эллипс (рис. 125).
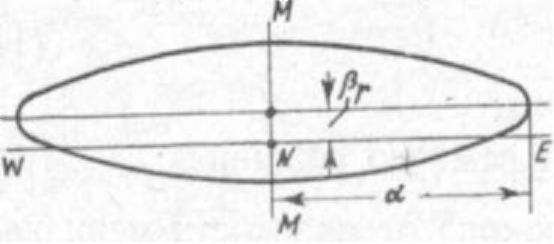
Рис. 125.
Принципиально это уже и есть гирокомпас, так как положением равновесия чувствительного элемента является плоскость истинного меридиана ММ.
Однако гирокомпас, совершающий незатухающие колебания около меридиана, не пригоден для использования в качестве курсоуказателя на судах.
Для того чтобы гирокомпасом можно было пользоваться для целей навигации, необходимо, чтобы главная ось чувствительного элемента гирокомпаса постоянно находилась в плоскости меридиана.
Это достигается в современных гирокомпасах путем гашения незатухающих колебаний с помощью специальных устройств, в результате чего незатухающие колебания превращаются в затухающие.
Работа гирокомпаса на движущемся судне
Гирокомпас, находящийся на неподвижном основании, своей главной осью устанавливается в плоскости географического (истинного) меридиана. При установке гирокомпаса на движущемся судне ось гирокомпаса отклоняется от плоскости меридиана. Отклонения оси гирокомпаса от ее равновесного положения в плоскости истинного меридиана называются девиациями гирокомпаса. Девиации к западу от меридиана принято считать отрицательными, а к востоку от меридиана — положительными.
 Скоростной девиацией называется отклонение оси гирокомпаса от плоскости истинного меридиана, вызванное движением судна с постоянной скоростью υ и неизменным курсом К. Плоскость горизонта, связанная с судном при движении его по сферической поверхности Земли, поворачивается вокруг оси, перпендикулярной к плоскости курса, которым следует судно с угловой скоростью
Скоростной девиацией называется отклонение оси гирокомпаса от плоскости истинного меридиана, вызванное движением судна с постоянной скоростью υ и неизменным курсом К. Плоскость горизонта, связанная с судном при движении его по сферической поверхности Земли, поворачивается вокруг оси, перпендикулярной к плоскости курса, которым следует судно с угловой скоростью

где R -радиус Земли.
Это вращение плоскости горизонта является дополнительным к тому вращению с угловой скоростью ω1=ωcosφ, которое плоскость горизонта имеет вследствие суточного вращения Земли. Оба вращения плоскости горизонта, складываясь, дают результирующее направление угловой скорости, отклоненное на угол δ от плоскости меридиана (рис. 1).
Гирокомпас на неподвижном основании устанавливается своей осью по направлению истинного меридиана, т. е. вдоль вектора угловой скорости вращения плоскости горизонта (рис. 3). Подобно этому ось гирокомпаса, находящегося на движущемся с постоянной скоростью и неизменным курсом судне, также устанавливается вдоль вектора угловой скорости вращения плоскости горизонта, т. е. под углом δ к плоскости истинного меридиана. Направление, в котором устанавливается ось гирокомпаса, находящегося на движущемся судне, называется гироскопическим или компасным меридианом.
Угол между географическим и гироскопическим меридианами, характеризующий величину скоростной девиации, определяется по формуле

где V-скорость движения в узлах;
К - курс корабля;
R - радиус Земли;
ω- угловая скорость движения Земли;
Rω- (900 уз)- линейная скорость точки земной поверхности на экваторе при суточном вращении Земли.
При северных курсах скоростная девиация направлена к западу, при южных — к востоку; в формуле это учитывается знаком минус. Если судно движется на восток (К = 90°) или на запад (К=270°), скоростная девиация равна нулю. В формулу скоростной девиации не входят параметры гирокомпаса, т. к. скоростная девиация принципиально присуща любому гирокомпасу и может быть вычислена. В гирокомпасах типа «Курс» скоростная девиация исключается специальным устройством — корректором.
Баллистическими девиациями называются отклонения оси гирокомпаса от положения равновесия при маневрировании судна вследствие возникающих при этом ускорений и сопутствующих им инерционных сил. Инерционные силы, воздействуя на чувствительный элемент, создают дополнительные моменты, которые и вызывают отклонения оси гирокомпаса от положения равновесия. Прецессия чувствительного элемента под действием момента сил инерции называется баллистической прецессией, а угол, на который поворачивается главная ось гирокомпаса за время действия сил инерции,— баллистическим перемещением.
Баллистической девиацией 1-го рода называется девиация, возникающая при воздействии сил инерции на центр тяжести чувствительного элемента. Такая девиация исключается при следующих условиях.
До маневра судно движется со скоростью V1 курсом K1. Гирокомпас имеет соответствующую скоростную девиацию

После окончания маневра, во время которого скорость судна и курс изменились, судно движется со скоростью V2 курсом К2. Этим новым значениям курса и скорости должно соответствовать новое положение равновесия, определяемое скоростной девиацией.

В результате баллистической прецессии ось гирокомпаса уйдет из начального положения равновесия, определяемого углом δ1, и в момент окончания маневра может занять одно из следующих трех положений (рис.2):
I-совпасть с положением равновесия, определяемым углом δ2;
II - перейти положение δ2;
III — не дойти до положения δ2.
В первом случае гирокомпас баллистических девиаций не имеет. Скорость баллистической прецессии равна скорости движения гироскопического меридиана; отклонение оси гирокомпаса от истинного меридиана равно той скоростной девиации, которую гирокомпас должен иметь для данной скорости и курса.
Во втором и третьем случаях скорость баллистической прецессии больше или меньше скорости движения гироскопического меридиана. В момент окончания маневра ось гирокомпаса отклонена от положения равновесия, определяемого углом, который она должна была бы занять согласно значениям скорости судна и курса совершения маневра. Возникают затухающие колебания оси гирокомпаса вокруг положения равновесия, определяемого углом δ2. Отклонение ∆b характеризует величину баллистической девиации 1-го рода.
Часто гирокомпасы конструируются так, что период незатухающих колебаний равен 84,4 мин только на расчетной широте (60° для гирокомпасов типа «Курс»). На всех же остальных широтах плавания период незатухающих колебаний отличается от указанного, т. е. при плаваниях в широтах, отличающихся от расчетной, гирокомпас при маневрировании имеет баллистическую девиацию 1-го рода.
Баллистическая девиация 2-го рода появляется вследствие воздействия сил инерции на масло в успокоителе. Для исключения баллистической девиации 2-го рода маслопровод успокоителя во время маневра судна перекрывается, и перетекание масла прекращается. Для этого в успокоителе имеется специальное устройство, называемое выключателем затухания.
Девиация на качке. Ускорения, которые возникают при качке, вызывают у одногироскопного компаса появление так называемой четвертной девиации: гироскоп не стабилизируется относительно главной оси и может раскачиваться вокруг нее с периодом качки судна, измеряющимся несколькими секундами. Под действием сил инерции, обусловленных качкой судна, центр тяжести чувствительного элемента периодически перемещается от вертикали то к западу, то к востоку. Вследствие этого появляется внешний момент, вызывающий прецессию чувствительного элемента и движение его к новому положению равновесия.
Величина четвертной девиации зависит от амплитуды колебаний точки подвеса гирокомпаса при качке, от периода качки и ее направления. Максимальной величины четвертная девиация достигает при качках на волнах, идущих четвертными румбами (N0— SW и NW — SO). При качках на волнах, идущих главными румбами (NS и 0W), гирокомпас четвертной девиации не имеет.
Чтобы уменьшить девиацию гирокомпаса на качке, необходимо увеличить период колебаний чувствительного элемента вокруг оси NS. Тогда отклонения центра тяжести чувствительного элемента к востоку или западу будут на качке малы. Внешний момент, вызывающий прецессию чувствительного элемента, станет, поэтому также мал, и девиация уменьшится.
Увеличение периода колебаний чувствительного элемента вокруг оси NS достигается применением двух гироскопов. Силы инерции, возникающие на качке, стремясь повернуть гиросферу вокруг оси NS, встречают сопротивление гироскопов, пропорциональное сумме составляющих моментов вдоль оси 0W. Момент силы инерции согласно правилу прецессии вызывает не повороты гиросферы относительно оси NS, а небольшие прецессионные движения гироскопов вокруг вертикальных осей. Гироскопы на качке то сходятся, то расходятся, что обусловливается изменением направления сил инерции при раскачивании судна.
Гироскопы в гиросфере связаны таким образом, что углы их поворота всегда равны. Поэтому направление суммарного кинетического момента относительно гиросферы при поворотах гироскопов не изменяется.
Величина периода колебаний гиросферы вокруг оси NS при качке зависит от силы натяжения пружин, связывающих гироскопы с корпусом гиросферы. В гирокомпасе «Курс» подобраны такие пружины, при которых этот период равен 10... 15 мин. Поэтому на качке (период 6...15 с) центр тяжести чувствительного элемента почти не смещается в плоскости OW, чем и достигается значительное уменьшение четвертной девиации.
Дата добавления: 2021-12-10; просмотров: 165; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!