Механизмы поворота гусеничных тракторов
Лекция ЛТр 3
Тема: Механизмы управления лесотранспортных средств.
Рулевое управление колесных лесотранспортных машин
Рулевое управление предназначено для обеспечения поворота колесных лесотранспортных
машин. К рулевому управлению предъявляются требования, обеспечивающие:
• минимальный боковой увод колес при их качении;
• необходимую маневренность лесной машины, включая малое
значение минимального радиуса поворота, высокую скорость
прохождения поворота, малый динамический коридор поворота;
• высокий коэффициент полезного действия механизмов;
• высокую надежность действия механизмов;
• ощущение водителем сопротивления повороту;
• хорошую курсовую устойчивость лесной машины;
• точность отслеживания действия водителя;
• предотвращение передачи толчков и ударов от дороги на рулевое колесо;
• соответствие положениям инженерной психологии и безопасности
конструкции.
Классификация проводится по следующим признакам:
• по конструкции рулевого механизма: червячный, комбинированный;
• по конструкции рулевого привода: к управляемым колесам,
к управляемым осям и к складывающимся звеньям;
• по принципу действия усилителя: гидравлический и пневматический.
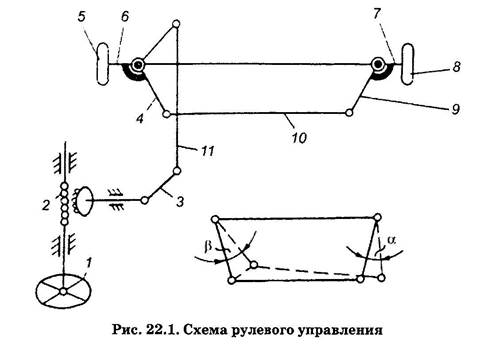
Принципиальная схема рулевого управления автомобиля .
Конструктивно рулевое управление состоит из рулевого механизма и рулевого привода (рис. 22.1). Рулевой механизм 1 с редуктором 2 обеспечивают увеличение подводимого к управляемым колесам 5 и 8 поворачивающего момента. В рулевой привод входят поворотные цапфы 6 , 7, поворотные рычаги 4, 9, поперечная 10 и продольная 11 тяги, а также сошка 3.
|
|
|
К рулевым механизмам предъявляются следующее требования:
• усилие на рулевом колесе не должно превышать 3 0 ...40Н
при движении машины и 120 Н при повороте на месте;
• должен обеспечивать устойчивость машины на прямой;
• рулевое колесо в прямолинейном движении должно иметь свободный ход;
• должен обеспечивать принцип отслеживания и «чувство дороги»;
• должен обеспечивать обратимость работы повернутых и направляющих
колес в нейтральное положение после освобождения рулевого колеса.
Рулевые механизмы проектируют на пределе обратимости, что снижает отдачу силового воздействия со стороны пути на руки оператора. Трущиеся пары рулевого механизма могут выполняться червячными, винтовыми, реечными. На автомобилях большой
грузоподъемности устанавливается комбинированный рулевой механизм в виде сочетания «винт-гайка-рейка-сектор». Для уменьшения коэффициента трения сопряжение «винт-гайка» осуществляется через циркулирующие шарики.
|
|
|
Механизмы бывают с различным расположением вала сошки горизонтальным, наклонным и вертикальным. По числу валов сошки существуют механизмы с одним и двумя валами.
Совершенство рулевого механизма определяется угловым передаточным числом и коэффициентом полезного действия.
Угловое передаточное число:

Для улучшения поворотливости и облегчения управления машиной необходимо, чтобы в среднем положении рулевого колеса угловое передаточное число было большим и уменьшалось с увеличением dφ
Эффективность управления зависит от КПД рулевого механизма в прямом и обратном направлениях. КПД в прямом направлении определяют при передаче усилия от рулевого колеса к
сошке, а КПД в обратном ή— при передаче усилия от сошки к рулевому колесу:

С увеличением значения ήn облегчается управление машиной, а с уменьшением ήо ухудшается обратимость и снижается поглощающая способность механизма толчков и ударов, возникающих
со стороны пути.
На автомобилях большой грузоподъемности даже при больших передаточных числах рулевого управления усилие на рулевом колесе может быть значительно. При установке на машинах шин низкого и сверхнизкого давления сопротивление повороту увеличивается.
|
|
|
По этим причинам в конструкцию рулевого управления вводят усилители
пневматического и гидравлического типов.
Рулевой привод предназначен для передачи усилий, необходимых для поворота управляемых колес и обеспечения правильной кинематики движения на повороте. У современных колесных
тракторов и автомобилей рулевой привод отличается числом тяг с одной поперечной и одной продольной; с двумя поперечными и с двумя продольными тягами. Рулевые приводы лесовозных автомобилей и некоторых колесных тракторов имеют по одной поперечной и одной продольной тяге и работают по одинаковому принципу. Существуют только некоторые конструктивные различия.
Вся тяги и рычаги привода соединены шарнирно. В наконечниках тяг устанавливаются сухари, охватывающие шаровые пальцы сошки и рулевых рычагов. Поперечная тяга имеет устройство
для регулировки по длине. К оценочным параметрам рулевого привода относятся: КПД
рулевого привода, который представляет собой отношение элементарной работы, выполненной колесами при повороте, к элементарной работе на сошке, его передаточное число и жесткость.
КПД рулевого привода лесовозных автомобилей и тракторов находится в пределах г|пр = 0,85...0. Малая жесткость рулевого привода приводит к возникновению колебательных процессов, а
|
|
|
следовательно, к вилянию и нарушению сходимости колес, ухудшению устойчивости машины, что сопровождается увеличением расхода топлива и износом шин.
Гидроусилитель руля. На колесных лесотранспортных машинах применяются гидроусилители рулевого управления или гидроусилители руля, которые позволяют облегчить управление,
смягчить удары от неровностей пути на рулевое колесо, сократить время поворота и сохранить устойчивость прямолинейного движения лесотранспортной машины при проколе шины управляемого колеса. Надежность рулевого управления влияет на безопасность
движения лесотранспортной машины, поэтому к гидроусилителю предъявляют ряд требований. Главным из них является «чувство дороги», т. е. пропорциональности усилия на рулевом
колесе сопротивлению поворота колес, а также прекращение их поворота, как только они повернутся на угол, заданный водителем. Кроме этого, гидроусилитель должен иметь минимальное запаздывание в срабатывании и обеспечивать управление машиной
в случае отказа в работе отдельных элементов гидросистемы. В конструкции усилителя любого типа должны быть следующие элементы: гидронасос, распределитель, силовой исполнительный
механизм и обратная связь между управляемыми колесами и распределителем.
В рулевых управлениях современных автомобилей и колесных тракторов применяются гидроусилители, работу которых можно представить структурной схемой (рис. 22.2). Применительно к гидроусилителю руля органом управления 1 будет рулевое колесо, источником энергии 2 — гидравлический насос, регулятором 3 — распределитель золотникового типа. Исполнительным механизмом 4 в рассматриваемом приводе является силовой гидравлический цилиндр, а объектом управления 5 — управляемые колеса автомобиля.
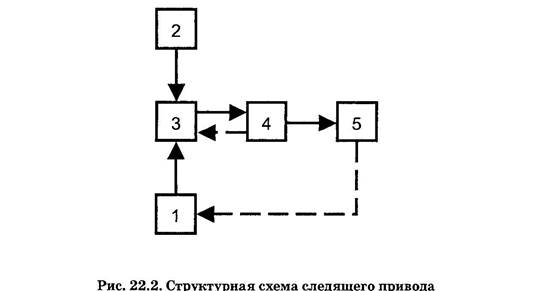
По сигналу от органа управления 1 регулятор 3 соединяет источник энергии 2 с исполнительным механизмом 4, связанным с управляемыми колесами лесотранспортной машины. После воспроизведения исполнительным механизмом в определенной закономерности сигнала от органа управления, регулятор, имеющий следящую связь с исполнительным механизмом (штриховая стрелка на рис. 22.2), прекратит подачу энергии от источника к исполнительному механизму. Таким образом, следящее устройство автоматически воспроизводит (отслеживает) закономерность изменения сигнала, создаваемого водителем на органах управления. В рулевых управлениях следящее устройство обеспечивает соответствие
между углом поворота рулевого колеса и углом поворота управляемых колес. В управлениях с гидроусилителем усилие на рулевом колесе пропорционально изменению сопротивления поворота, т. е. у водителя сохраняется «чувство дороги». Такая обратная связь (на рис. 22.2 штриховая стрелка от управляемого колеса к рулевому колесу) может быть механическая, в виде системы рычагов, и гидравлическая, под действием которой регулятор прекращает подачу энергии к исполнительному механизму.
Гидроусилители подразделяются по месту установки распределителя и исполнительного элемента и по наличию обратной связи.
Принцип работы автомобильного рулевого механизма с гидроусилителем. На автомобилях ЗИЛ рулевой механизм объединен в один агрегат с гидроусилителем (распределителем и силовым цилиндром). Такая компоновочная схема отличается компактностью, малым количеством трубопроводов, высокой чувствительностью усилителя к повороту и устойчивостью против передачи возбуждения от управляемых колес.
Гидроусилитель (распределительное устройство и силовой цилиндр) лесовозных автомобилей MA3-5434 и KpA3-6437 поставлен отдельно от рулевого механизма. Силовой цилиндр гидроусилителя автомобиля Урал-4320 закреплен шарнирно на раме автомобиля, а распределительное устройство совмещено с рулевым механизмом.
Две последние компоновочные схемы допускают значительную свободу в размещении отдельных элементов усилителя и являются более универсальными.
В рулевом механизме с гидроусилителем картер 1 механизма является одновременно цилиндром гидроусилителя (рис. 22.3).Вставить 1листом
Поворот водителем рулевого колеса и винта 3 в роликах приводит к его продольному перемещению в поршне-рейке 2 и упорного подшипника 6 . К картеру рулевого механизма прикреплен клапан управления с золотником 7 и реактивными плунжерами 8 , разжатыми пружинами 9. Если осевая сила, создаваемая водителем, превышает усилие сжатия пружин, то упорный подшипник перемещает плунжеры и золотник 7. При этом одна полость цилиндра гидроусилителя сообщается с линией высокого давления, связывающей гидронасос с рулевым механизмом, а из другой полости масло возвращается в насос Поршень-рейка под возросшим давлением масла, перемещаясь, поворачивает вал 10 сошки и рулевую сошку 11. С увеличением сопротивления повороту управляемых колес возрастают давление в цилиндре и под реактивными плунжерами, а также усилие на рулевом колесе. Следовательно, с изменением сопротивления поворота управляемых колес пропорционально изменяется
сопротивление повороту рулевого колеса, тем самым создается у водителя «чувство дороги»
. С прекращением поворота рулевого колеса масло некоторое мгновение продолжает перемещать поршень-рейку с винтом, сдвигая при этом золотник к среднему положению, что вызывает снижение давления в цилиндре до необходимого уровня для удержания колес в установленном положении и прекращает движение поршня-рейки, а также поворот
управляемых колес. На лесовозных автомобилях применяется насос гидроусилителя
лопастного типа двойного действия, в крышке которого расположены перепускной и предохранительный клапаны. Стабильность производительности насоса на различных скоростных режимах обеспечивает перепускной клапан, а помещенный внутри
перепускного клапана предохранительный клапан ограничивает максимальное давление рабочей жидкости.
Принцип работы рулевого механизма с гидроусилителем колесного лесопромышленного трактора. Рулевое управление колесного лесопромышленного трактора с шарнирно-сочлененной рамой состоит из гидравлической системы, которая служит для
поворота полурам относительно друг друга, и механической — для управления поворотом и обеспечения обратной связи
(рис. 22.4). Вставить 1листом
Механическая часть состоит из рулевого колеса 14 с валом 13 (рулевая колонка), червячной пары 10 механизма рулевогоуправления и тяги обратной связи 4. Полурамы поворачиваются
вокруг вертикального шарнира 2 под воздействием силы, создаваемой гидроцилиндром 1.
Насос 7 гидроусилителя — одноступенчатый шестеренчатый, имеет клапан расхода 6 , обеспечивающий постоянную подачу масла к распределителю 12 на различных частотах вращения, и предохранительный клапан 5, ограничивающий максимальное давление в системе. Установка колес передней и задней осей шарнирно- сочлененной рамы не обеспечивает стабилизирующий момент,поэтому для повышения курсовой устойчивости трактора маслопроводы к цилиндрам запираются обратными клапанами 15 и 17.
При прямолинейном движении рулевое колесо 14 находится в нейтральном положении. Насос 7 забирает масло из бака 9 и через клапан расхода 6 и фильтр сливает в бак. В таком состоянии
плунжер 16 находится в таком положении, что не воздействует на клапаны 15 к 17 к он запирают выход масла из цилиндров 1, исключая самопроизвольный поворот трактора, когда оператор повернет рулевое колесо 14 влево или вправо, вал 13 незначительно переместится в осевом направлении, переместив золотник 11.
При этом в одном из каналов распределителя 12 повысится давление масла, и оно через обратный клапан (15 или 17) начнет поступать в полости А или Б цилиндра. Одновременно под перепадом давления плунжер 16 переместится из среднего положения и своим хвостовиком откроет противоположный клапан, позволяя выйти маслу из другой полости цилиндра. Если поворот рулевого колеса прекратится, то тяга обратной связи 4 через сошку 3 и червяк
вернет золотник в нейтральное положение, при котором масло, подаваемое насосом, через клапан расхода 6 будет сливаться в бак 9. В распределителях имеются разжатые пружинами реактивные плунжеры, которые устанавливают золотник в нейтральном положении и так же, как у гидроусилителя рулевого управления автомобиля, создают чувство сопротивления повороту трактора — «чувство дороги».
Механизмы поворота гусеничных тракторов
Классификация механизмов поворота и предъявляемые к ним требования.
Поворот гусеничного трактора обеспечивается специальными механизмами поворота, которые классифицируются по следующим признакам:
• числу фиксированных радиусов — одноступенчатые, многоступенчатые
и бесступенчатые;
• характеру изменения скорости движения — с постоянной
скоростью забегающей гусеницы, со снижаемой скоростью забегающей
гусеницы и с постоянной скоростью центра трактора;
• подводу мощности — однопоточные, двухпоточные и с регулируемым
потоком для каждой стороны.
При повороте гусеничного трактора в механизме поворота и в контакте гусеничной цепи с грунтом происходят сложные динамические и кинематические процессы. Это объясняется прежде всего изменчивостью сопротивления повороту трелевочной системы и момента трения тормоза механизма поворота, которые являются функциями двух переменных: радиуса поворота и времени.
Тормозной момент механизма поворота зависит от коэффициента трения скольжения, который изменяется от скорости.
Мгновенный радиус поворота трактора определяется соотношением двух переменных во времени величин — момента сопротивления повороту и тормозного момента механизма поворота.
У гусеничных машин со ступенчатым механизмом и фрикционными элементами, работающими ≪всухую≫, отсутствует строгое соответствие между положением рычага управления и радиусом поворота, что приводит к плохой управляемости трелевочной системы.
Для прохождения поворота с малым радиусом водитель вынужден неоднократно создавать управляющее воздействие на механизм поворота.
Работа таких механизмов носит релейный характер, т. е. процесс поворота трактора происходит не по плавной кривой, а скачкообразно. Неравномерность поворота приводит к увеличению максимального значения касательной силы тяги на гусеницах, потерь от буксования, ухудшению проходимости трактора и экологической совместимости системы «движитель-лесная почва».
Характер поворота трелевочной системы зависит от сочетания различных факторов: условий эксплуатации, структуры пачки, энергонасыщенности трактора, режимов работы, профессиональных приемов и квалификации тракториста.
Дата добавления: 2023-01-08; просмотров: 62; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!