Регулирование частоты вращения 3х-фазных асинхронных двигателей.
Частоту вращения асинхронного двигателя можно регулировать:
1. Изменением активного сопротивления в цепи ротора двигателя с фазным ротором.
В роторной цепи проходят большие токи, для которых сложно создать резисторы с непрерывно меняющимся сопротивлением. Поэтому резисторы, обеспечивающие реостатное регулирование, делают ступенчатыми, а следовательно и частоту вращения регулируют ступенчато.
При некотором Мс=const, скольжение SºRполн также увеличивается, а угловая скорость уменьшается. Способ позволяет регулировать плавно регулировать угловую скорость в широких пределах (до s=1)
2. Изменением напряжения подводимое к обмотке статора.
При некотором Мс=const, при снижении напряжения скольжение будет увеличиваться, скорость при этом будет понижаться. Регулирование скольжения возможно в пределах (0<S<Sкр ).
3. Изменением частоты питающего напряжения:
- если момент постоянный 
- если постоянна мощность, то момент Ммах должен изменятся обратно пропорционально частоте вращения и следовательно f1.


Магнитный поток при различных значениях частоты f1 остается постоянным Ф=const.
4. Изменением числа пар полюсов.
Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер. Существует два способа регулирования изменением числа пар полюсов.
Первый способ. В пазы статора укладываются две обмотки с разным числом полюсов. В зависимости от требуемой частоты вращения к источнику питания подключается та, или иная обмотки.
Второй способ. Обмотку каждой фазы составляют из двух частей, которые в процессе регулирования соединяют последовательно или параллельно. При этом число пар полюсов изменяется в два раза.
1. Изменение значения активного сопротивления роторной цепи двигателя с фазным ротором ( реостатное регулирование ).
Регулирование угловой скорости осуществляется при включении в 3 фазы ротора внешнего сопротивления.
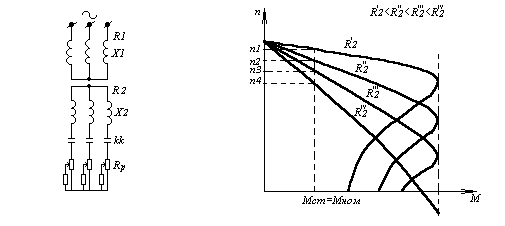
Рис.4. Схема включения регулировочных Рис.5. Механические
резисторов. реостатные характеристики
асинхронного двигателя в двигательном режиме.
Из рис.5 следует, что чем больше сопротивление R1’ < R2’’ < R2’’’ < R2’Ú подключается к роторной цепи, тем меньшую частоту вращения развивает двигатель при том же моменте Мст.
В роторной цепи проходят большие токи, для которых сложно создать резисторы с непрерывно меняющимся сопротивлением. Поэтому резисторы, обеспечивающие реостатное регулирование, делают ступенчатыми, а следовательно и частоту вращения регулируют ступенчато.
Этот способ имеет те же недостатки, что и для двигателей постоянного тока:
а) Диапазон регулирования непостоянен и зависит от нагрузки. Жёсткость характеристик значительно снижается по мере уменьшения частоты вращения ( смотри характеристику при R2’ и R24 рис.5 ).
Регулирование асинхронного двигателя изменением напряжения подводимого к статору.
Критический момент 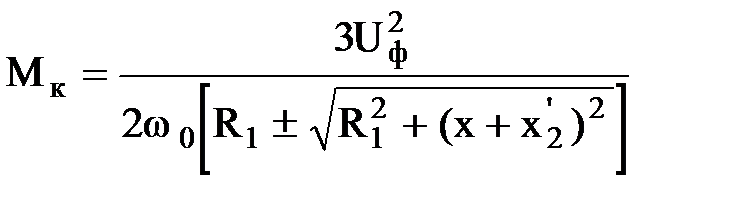 изменяется прямо пропорционально квадрату подводимого напряжения Uф , а
изменяется прямо пропорционально квадрату подводимого напряжения Uф , а 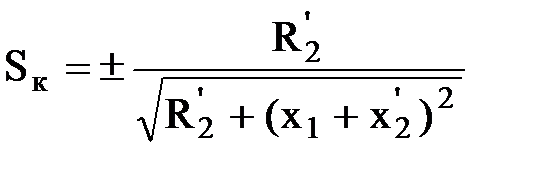 от него не зависит. Это определяет вид механических характеристик, соответствующих различным значениям Uф.
от него не зависит. Это определяет вид механических характеристик, соответствующих различным значениям Uф.
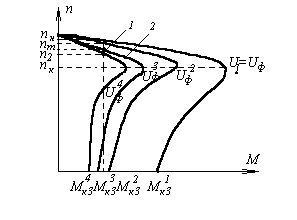
Рис.7. Механические характеристики асинхронного двигателя
при изменении напряжения подводимого к статору.
Как правило, регулирование осуществляется уменьшением напряжения. При этом Uф’>Uф’’>Uф’’’>Uфз критическая частота вращения ( критическое скольжение ) остаётся постоянной, а максимальный момент снижается пропорционально квадрату напряжения.
Если Мст>Мкз , двигатель не тронется с места. Поэтому необходимо запускать двигатель при номинальном напряжении, или предварительно снять с его вала нагрузку. Диапазон регулирования небольшой ( до nк ).
Для увеличения диапазона регулирования в цепь ротора вводят нерегулируемый резистор, сопротивление которого достаточно, чтобы получить критическое скольжение ( Sк=3¸4 ) рис.8. Такое регулирование в отличие от реостатного позволяет обеспечить плавное изменение частоты вращения и исключить контактную аппаратуру в роторной цепи.
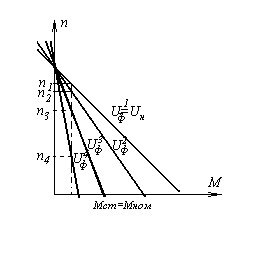
Рис.8. Механическая характеристика асинхронного двигателя
при изменении напряжения подводимого к статору и включении
активного сопротивления в цепь ротора.
Регулирование асинхронного двигателя совместным изменением частоты и напряжения
( частотное регулирование ).
Наибольший практический интерес представляет частотный способ плавного регулирования частоты вращения. Это вытекает из формулы: 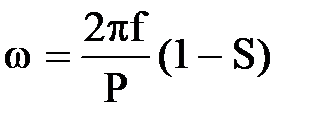 .
.
При регулировании частоты также необходимо регулировать и напряжение, что вытекает из формулы: U1»E1=4.44f1w1ф.
Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте, так как при уменьшении f1 поток возрастает, то это приведёт к резкому увеличению тока и повышению температуры. При увеличении частоты поток будет уменьшаться и, как следствие, уменьшится допустимый момент.
В номинальном режиме магнитная система двигателя насыщена. При Uном допустимо только увеличение частоты питающего напряжения. Тогда, при значении частоты f1>f1ном , соответственно увеличится w0 и индуктивное сопротивление 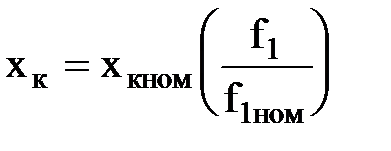 и уменьшится магнитный поток. В соответствии с уравнением для
и уменьшится магнитный поток. В соответствии с уравнением для 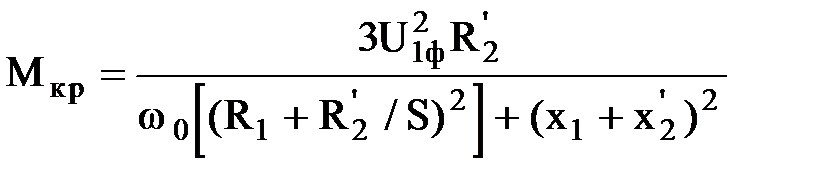 увеличение w0 и xк = x1+x2’ вызывает уменьшение критического момента ( Мкр )
увеличение w0 и xк = x1+x2’ вызывает уменьшение критического момента ( Мкр )
Критическое скольжение Sк с увеличением xк на основании уравнения для уменьшится. Иногда, механическая характеристика при f1>f1ном , будет иметь вид ( а )( рис.10 ).
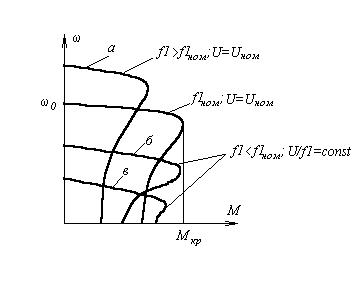
Рис.10. Механические характеристики асинхронного двигателя
при изменении частоты питающего напряжения.
В соответствии с законом Костенко - характеристики асинхронного двигателя при частотах питающего напряжения, отличных от номинальной, зависят от соотношения между напряжением сети U1 и частотой сети f1. Основной закон частотного управления имеет вид:
где М1 и U1 - напряжение и момент при частоте f1 ; U2 и М2 - то же при частоте f2.
Для того, чтобы поток Ф при увеличении ил уменьшении частоты f1 оставался постоянным, необходимо при изменении частоты кратко менять напряжение , т.е. 
При соблюдении этого условия критический момент изменится: увеличится с ростом частоты и уменьшится с её снижением ( кривые б, в рис.10 ).
При Мст=const ( т.е. М1=М2 ) из закона Костенко следует  , т.е. условие
, т.е. условие  целесообразно для приводов, у которых Мст - const.
целесообразно для приводов, у которых Мст - const.
Если требуется поддержать режим постоянной мощности электродвигателя P2=M2w2 - const, то, так как частота вращения пропорциональна f1, получим условие M1f1=M2f2=const.
С учётом ( б, рис 10 )  , т.е. регулируемый источник переменного тока должен обеспечивать изменение U и f в таких пределах, чтобы
, т.е. регулируемый источник переменного тока должен обеспечивать изменение U и f в таких пределах, чтобы  Если же двигатель работает на вентиляторную нагрузку, т.е. М~f2 , то
Если же двигатель работает на вентиляторную нагрузку, т.е. М~f2 , то  и питающее напряжение определяется не только частотой f1 , но и характером изменения момента статической нагрузки на валу двигателя.
и питающее напряжение определяется не только частотой f1 , но и характером изменения момента статической нагрузки на валу двигателя.
Механические характеристики для рассмотренных режимов представлены на рис. 11
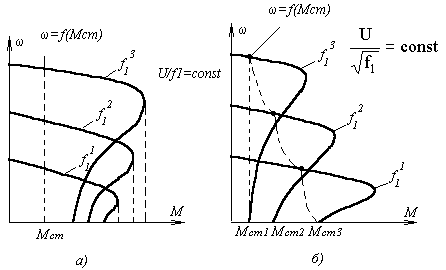
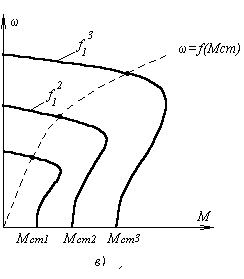 Рис.11. Механические характеристики асинхронного двигателя
Рис.11. Механические характеристики асинхронного двигателя
при регулировании изменения частоты питающего напряжения.
На рис ( а ) приведена регулировочная характеристика при Мст=const; на ( б ) - при Pст=Мстw=const; на ( в ) - при Мст=var ( вентиляторная нагрузка ).
Регулирование угловой скорости двигателей, выполненных на частоту f1=50Гц, выше номинальной ( повышением частоты ) допустимо в 1.5¸2.0 раза. Указанное ограничение обусловлено прежде всего прочностью крепления обмотки ротора, а так же повышенными потерями мощности в стали статора. Регулирование скорости ниже номинальной ( т.е. понижением частоты ) ограничивается нестабильностью работы двигателя, в связи с чем диапазон регулирования Д=1:10¸1:15.
Способ регулирования угловой скорости изменением f1 позволяет получить жёсткие характеристики ( см. рис ).
Потери мощности при работе на регулировочных характеристиках не велики, так как двигатель работает не линейных участках механических характеристик при небольших значениях скольжения ( Рпэ=Мw0S ).
При наличии соответствующего преобразователя частоты можно получить любую плавность регулирования.
Регулирование асинхронного двигателя переключением пар полюсов.
Из выражения  или
или  следует , что при изменении числа пар полюсов р получаются механические характеристики с различной частотой вращения идеального холостого хода.
следует , что при изменении числа пар полюсов р получаются механические характеристики с различной частотой вращения идеального холостого хода.
Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер. Существует два способа регулирования изменением числа пар полюсов.
Первый способ. В пазы статора укладываются две обмотки с разным числом полюсов. В зависимости от требуемой частоты вращения к источнику питания подключается та, или иная обмотки.
Второй способ. Обмотку каждой фазы составляют из двух частей, которые в процессе регулирования соединяют последовательно или параллельно. При этом число пар полюсов изменяется в два раза.
Дата добавления: 2018-02-15; просмотров: 1455; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!