Непосредственное измерение емкости
Московский Государственный Технический Университет им. Н.Э.Баумана
кафедра СМ-7
Обзор датчиков положения
2002 г.
Введение
Датчик,первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину (давление, температуру, частоту, скорость, перемещение, напряжение, электрический ток и т.п.) в сигнал, удобный для измерения, передачи, преобразования, хранения и регистрации, а также для воздействия им на управляемые процессы.
Датчики характеризуются: законом изменения выходной величины (у) в зависимости от входного воздействия (входной величины х), пределами изменений входных (xmin - xmax) и выходных величин (ymin - ymax); чувствительностью S= D/Dx , порогом чувствительности (значением минимального воздействия, на которое реагирует датчик.) и временными параметрами (постоянными времени).
В соответствии с классификацией, принятой в Государственной системе приборов и средств автоматизации (ГСП), датчик относятся к техническим средствам сбора и первичной обработки контрольно-измерительной информации.
Датчик являются одними из основных элементов в устройствах дистанционных измерений, телеизмерений и телесигнализации, регулирования и управления, а также в различных приборах и устройствах для измерений в физике, биологии и медицине для контроля жизнедеятельности человека, животных или растений (биологические датчики).
Датчик перемещения, измерительный преобразователь линейных или угловых перемещений в сигнал (электрический, механический, пневматический), удобный для регистрации, дистанционной передачи и дальнейших преобразований.
В качестве датчика перемещений могут быть использованы ёмкостные, индуктивные, трансформаторные, резисторные, струнные, фотоэлектрические, струйные, индукционные, ферродинамические датчики, кодирующие диски. Различают датчики малых перемещений — от нескольких мкм до нескольких см и больших перемещений — от десятков см до нескольких м; для измерения больших перемещений применяют датчики пути. Наиболее высокую чувствительность при измерении малых перемещений обеспечивают фотоэлектрические, ёмкостные и некоторые типы индуктивных датчиков. Для измерения перемещений, связанных с деформацией деталей, используют тензодатчики, обычно с усилителями.
Как правильно выбирать датчик положения
Невозможно представить область, где бы не применялись датчики положения и перемещения, являясь важным связующим звеном между электронной и механической частями приборов.
Выбирая датчик, прежде всего, необходимо правильно определить приоритеты по следующим критериям:
· разрешение и точность;
· линейность;
· скорость измеряемого процесса;
· условия применения и класс защиты;
· надёжность;
· габаритные размеры;
· стоимость.
Теперь, расставив приоритеты, необходимо учесть, что датчик может определять абсолютное или относительное положение контролируемого объекта. Исходя из этого, существуют два основных метода определения положения и измерения перемещений.
В первом методе датчик вырабатывает сигнал, являющийся функцией положения одной из его частей, связанных с подвижным объектом, а изменения этого сигнала отражают перемещение. Такие датчики положения называются абсолютными. К ним относятся:
· резистивные (потенциометрические) датчики;
· индуктивные датчики с подвижным сердечником;
· ёмкостные датчики с подвижными обкладками;
· цифровые кодовые датчики абсолютных значений.
Во втором методе датчик генерирует единичный импульс на каждом элементарном перемещении, а положение определяется подсчётом суммы импульсов в зависимости от направления перемещения. Такие датчики положения называются относительными. Достоинством таких датчиков, по сравнению с абсолютными, является простота и низкая стоимость, а недостатком — необходимость периодической калибровки и дальнейшей микропроцессорной обработки.
Датчики также делятся на контактные и бесконтактные. В бесконтактных датчиках связь между подвижным объектом и датчиком осуществляется посредством магнитного, электромагнитного или электростатического полей, а также оптоэлектронным способом.
Резистивные (потенциометрические) датчики
Резистивные датчики основаны на простом принципе действия, что приводит к конструкциям умеренной стоимости; измеряемый сигнал может иметь достаточно высокий уровень и линейность и не требовать специальной электрической схемы обработки. Однако, такой датчик обладает внутренним трением, которое влияет на его точность, являясь источником шумов и причиной износа, что влечёт за собой ухудшение характеристик (линейности, точности) и устанавливает предел количества измерений, которое датчик может выдержать. Кроме этого, на его функционирование заметно влияет окружающая атмосфера (влажность, пыль, температура…). Средствами борьбы с этими дестабилизирующими факторами являются:
· использование новейших резистивных покрытий и компаундов
заполнения на основе пластиков;
· применение фоторезистивных покрытий;
· использование магнитозависимых резисторов — для бесконтактного считывания положения;
· использование встроенных в резистор редукторов — для улучшения разрешения.
Из перечисленного выше ясно, что датчики подобного типа не могут отображать быстрые, повторяющиеся движения и применяться там, где есть сильные вибрации.
Резистивные датчики подразделяются на однооборотные и многооборотные, с упором или без, проволочные и пластиковые.
Производством широкой номенклатуры резистивных датчиков, выполненных по различным технологиям (проволочные, пластиковые, магниторезистивные и др.) для широкого спектра применений, занимается фирма Bourns. Лучшие образцы, производимые этой фирмой, имеют разрешение до 0,009% (от полного сопротивления), ресурс — до 25 миллионов оборотов и расширенный рабочий температурный диапазон.
Индуктивные датчики
Широко применяются в схемах ДП индуктивные преобразователи, разработкой которых занимаются многие организации. Этот класс ДП, наиболее разработанный, содержит разные модификации, среди которых магнитоупругие, индуктивные, соленоидные и дифференциальнотрансформаторные являются наиболее распространенными. Большинство этих датчиков применяются в машиностроении для контроля размеров деталей и в приборостроении для измерения теплоэнергетических параметров. Дифференциальнотрансформаторные ДП отличаются более высокой точностью, благодаря двухканальной схемой построения.
Разновидностью индуктивных ДП, выделенных в отдельный класс приборов, являются индуктосины, отличающиеся от классических индуктивных ДП развернутой в линейку распределенной магнитной системой. Индуктосины находят применение при измерении больших перемещений до 1000 и более мм, например, в металлообрабатывающих станках с программным управлением. Для прецезионных станков в часовой промышленности известны примеры использования индуктосинов для контроля перемещений в диапазоне от 1 мкм до 10 мм. Однако широкого применения для измерения малых перемещений индуктосины не нашли из-за сложности и дороговизны.
Принцип действия индуктивных датчиков основан на том, что в перемещение, которое предполагается измерить, вовлекается один из элементов магнитного контура, который вызывает тем самым изменение потока через измерительную обмотку и соответствующий электрический сигнал.
Если подвижным элементом является ферромагнитный сердечник, то его перемещение проявляется:
· в изменении коэффициента самоиндукции катушки (переменная индуктивность);
· в изменении коэффициента связи между первичной и вторичной обмотками трансформатора (дифференциальный трансформатор), что приводит к изменению вторичного напряжения.
В трансформаторе с переменной связью одна обмотка может вращаться относительно другой, закрепленной (одна из них играет роль источника, а другая — приёмника). Первичная обмотка образует индуктор, а вторичная обмотка с наведённым током даёт напряжение в функции угла вращения (индуктивный потенциометр, резольвер).Индуктивные датчики подключаются в цепь, питаемую источником синусоидального напряжения с частотой нескольких кГц и могут измерять непосредственно линейное или угловое перемещение. Датчики этого типа, с одной стороны, чувствительны к внешним электромагнитным полям, а с другой — способны сами их индуцировать. Поэтому необходимо их экранировать.
Индуктивные датчики довольно дороги и сложны в обработке снимаемых сигналов, требуют запитки стабильным синусоидальным напряжением, но зато практически не зависят от атмосферных условий, пригодны к использованию в условиях чрезвычайно агрессивной среды, имеют высокое время наработки на отказ, дают очень высокую точность и линейность.
Цифровые кодовые датчики
Измерительную информацию, получаемую в аналоговом виде, часто можно обрабатывать с помощью цифровых схем, что создает дополнительные удобства. Это становиться возможным при использовании аналогово-цифровых преобразователей. В случае перемещений можно создать датчик, измеряющий положение — линейное или угловое — и выдающий его сразу в цифровой форме. Как и во всех приборах с цифровым преобразованием, информация оказывается квантованной и, следовательно, разрешение всегда конечно. Такие датчики могут надёжно передавать информацию об измеряемом положении по последовательному интерфейсу на достаточно большие расстояния от нескольких датчиков по одной линии связи.
Абсолютные цифровые датчики — это рейки для линейных перемещений или диски для угловых перемещений, разделённые на N равновеликих площадок (полос в случае рейки, секторов в случае диска), на которых записаны бинарные слова, соответствующие определённому положению. Поэтому при сбоях в работе, включении, прерывании питающих напряжений или предельной частоты работы прибора в распоряжении пользователя имеется точная позиция положения как двоичного бита. Чаще всего используют помехозащищенную двоичную Грей-кодировку, при которой за каждый шаг измерения изменяется лишь один знак кодовой информации и при этом легко контролируются ошибки передачи сигнала. Распространено также двоичное и двоично-десятичное кодирование. Имеются датчики с механическим и бесконтактным съёмом информации.
Инкрементальные цифровые датчики отображают измеряемое положение количеством импульсов, которые затем подсчитываются микропроцессором с учетом направления перемещения по сдвигу фаз между двумя каналами. При использовании специальных микросхем можно удвоить или даже учетверить разрешающую способность. Такие датчики требуют время от времени калибровки по нулевому отсчёту и при сбоях. Имеются датчики с механическим и бесконтактным съёмом информации.
Механические цифровые (абсолютные или инкрементальные) датчики — низкая цена, невысокая разрешающая способность (до 200 делений на 360о), небольшая продолжительность эксплуатации (до 106 циклов поворота у лучших образцов), ограниченная частота вращения, выходные сигналы должны быть пропущены через подавители дребезга.
Бесконтактные цифровые (абсолютные или инкрементальные) датчики на основе оптоэлектроники или магниторезистивного эффекта. Датчики этого типа менее всех подвержены дестабилизирующим факторам окружающей среды, имеют очень большую долговечность, очень высокую точность (до 104 делений на 360о для абсолютных и 128000 для инкрементальных) и относительно высокую стоимость. Их применение оправдывается там, где нужны точность и надёжность.
Мкостные датчики
Ёмкостный датчик, измерительный преобразователь неэлектрических величин (уровня жидкости, механические усилия, давления, влажности и др.) в значения электрической ёмкости. Конструктивно емкостный датчик представляет собой электрический конденсатор плоскопараллельный или цилиндрический . Различают емкостные датчики, действие которых основано на изменении зазора между пластинами или площади их взаимного перекрытия, деформации диэлектрика, изменении его положения, состава или диэлектрической проницаемости.
Ёмкостные датчики замечательны своей простотой, что позволяет создавать прочные и надежные конструкции.
Основная формула для расчета емкостных датчиков, определяет емкость конденсатора, из двух одинаковых пластин, каждая площадью S (м2) и расстоянием между ними D (м).

 , [Ф]
, [Ф]
 [Ф/м]
[Ф/м]
Формула определяет возможные сферы применения датчиков, т.е.
- Реакция на изменение геометрии (S или D).
- Реакция на изменение диэлектрической проницаемости 
Характерные области применения емкостных датчиков - прецизионные измерения механических перемещений, толщиномеры, измерение уровней и давления, определение химического состава и влажности вещества, охранные системы. От температуры диэлектрическая проницаемость зависит сильнее у диэлектриков с полярными молекулами.
В датчиках перемещения диэлектриком обычно служит воздух, так что параметры конденсатора зависят только от геометрических характеристик и не зависят от свойств используемых материалов. Сделав датчик дифференциальным, можно избежать влияния температуры: изменения размеров малы и они взаимно уравновешены. Влажностью также можно пренебречь, ибо при изменении влажности от 0 до 100 процентов диэлектрическая проницаемость воздуха меняется на одну сотую процента. Вредное влияние на датчик может оказывать поверхностное сопротивление изоляторов, на которые крепятся детали емкостного датчика: с поверхности изоляторов наводятся паразитные сигналы. Этот недостаток может быть устранен конструктивными решениями.
Измерение емкости.
Преобразовать изменение емкости в электрический сигнал можно различными способами. Наибольшее распространение получили три принципа измерения:
Непосредственное измерение емкости
 |
рис.1
Непосредственное измерение емкости fo~50-1000 Гц, измерение 100пФ-100мкФ, погрешность несколько процентов. К и R - установка нуля.
J = Uо*2*¶*fo*(Co+Cx)
прибор можно отградуировать непосредственно в отношениях емкостей Сх к Со, Со можно заменить набором эталонных емкостей. При измерении емкости этим методом напряжение должно быть синусоидальным, так-как в противном случае за счет высших гармоник может произойти значительное искажение кривой тока, что может привести к большим погрешностям измерения.
2. Измерение емкости мостом.
 |
рис. 2.
Первое плечо моста образуется испытуемым конденсатором Сх, который можно заменить эквивалентной последовательной схемой. Третье плечо состоит из образцового конденсатора Со без потерь (воздушный конденсатор) и магазина сопротивлений Rо. Второе и четвертое плечи моста выполнены из магазина сопротивлений R2 и R4 . В одну диагональ включается источник питания переменного тока, в другую - нулевой индикатор.
Для уравновешивания моста устанавливают R0 = 0 и, изменяя R4 и R2, получают наименьший ток в гальванометре. Затем, не изменяя R4 и R2, регулируют R0 , уменьшая ток в гальванометре, процедуру повторяют до получения равновесия. Измеряемая емкость:

Если потерями в конденсаторе Сх можно пренебречь, R0 ставить не нужно. Мостовые измерители успешно работают при измерении емкостей от 10-4 пФ до 102 мкФ.
Измерение емкости можно производить и с помощью неуравновешенного моста, по величине разбаланса напряжений Uд в диагонали моста. В случае использования электронного вольтметра, с большим входным сопротивлением:
3. Измерение емкости методом резонанса.
 |
Удобны для измерения емкости в пределах (1-5) нФ, типичная погрешность 1-3%. Измерение основано на включении измеряемой емкости в резонансный контур с последующим определением его резонансной частоты:
Напряжение на питающих зажимах контура максимально при резонансной частоте, а сопротивление контура максимально (резонанс токов). Плавно перестраивая частоту питающего напряжения, добиваются резонанса в контуре.

Формулы справедливы и для последовательного колебательного контура, но обнаружение резонанса производится по минимальному напряжению на зажимах контура (резонанс напряжений).
Типы емкостных датчиков
Датчик с переменным зазором, пределы измерения 0-1 мм.
 |
 |
Дифференциальный датчик, с переменным зазором. Пределы измерения (0-1) мм.
Датчик с переменной диэлектрической проницаемостью, перемещение дилектрика в зазоре, он же измеритель уровня жидкости в баке.
 |
Поворотный конденсатор, измерение угла поворота оси.
Важной характеристикой конденсатора переменной емкости является закон изменения емкости в зависимости от угла поворота ротора.
· Прямоемкостный конденсатор характеризуется линейной зависимостью емкости от угла поворота ротора.
· Прямоволновой конденсатор имеет квадратичную зависимость емкости от угла поворота.
· Логарифмический конденсатор характеризуется постоянством относительного изменения емкости при повороте ротора на 1о.
Возможна система с поворачивающейся пластиной диэлектрика и неподвижными электродами. Во всех случаях, зависимость емкости, от угла поворота обеспечивается формой пластины.
Таким образом, возможно реализовать достаточно простые датчики линейных и угловых перемещений, а также инклинометры (датчики крена) с достаточно высокой точностью измерения.
Ниже даны примеры некоторых датчиков такого типа, имеющиеся в настоящее время на рынке.
Датчик перемещения емкостный (компания «Теплоэнергетические технологии»)
Датчик перемещения емкостный с унифицированным выходным сигналом предназначен для измерения перемещения рабочих частей объекта. Он обеспечивает непрерывное преобразование измеряемого параметра в унифицированный выходной сигнал ±5мА. Датчик снабжен магнитными стойками, что значительно упрощает его установку на объекте.
| Наименование параметра | Значение по ТУ |
| Диапазон измерений, мм | 0-50 |
| Погрешность измерений, % (согласуется с заказчиком) | ±1 |
| Напряжение питания, В | ±12±20% |
| Диапазон рабочих температур, °C | от +5 до +70 |
| Размеры, мм | 163х73х69 |
| Масса, г | 400 |
 |
Линейные датчики (Компания "Микросенсорные технологии")
Линейные датчики наряду с угловыми являются наиболее распространенными приборами систем контроля и управления. В настоящее время в рамках системы начат серийный выпуск датчиков малых линейных перемещений (4 модификации), охватывающих диапазон измерений от 0-1мм до 0-50мм.
Конструктивно приборы представляют собой цилиндрический конденсатор с одной из обкладок, перемещающейся вдоль оси. Механически это один из самых отработанных в машиностроении узлов: цилиндр с ходящим внутри него поршнем.
Так же как в инклинометрах и угловых датчиках, в линейных датчиках используется электронный блок типа IPU-1 (размер d36x9, весом 5 г). Линейные датчики также могут быть доукомплектованы: для питания от однополярного источника питания +5В - +15В; для получения на выходе датчика заданного вида кода при работе в цифровых системах; элементами дистанционной перестройки диапазона и “0” внешним цифровым сигналом. Линейные датчики выпускаются в двух конструкторских модификациях: с клеммной колодкой и гибкими выводами.
Весьма интересны функциональные возможности датчиков: вид характеристики вход (перемещение) - выход (электрический сигнал) может трансформироваться в широких пределах.
На рис.1 показаны возможные варианты характеристики с однополярным выходным сигналом, а на рис.2 - с двуполярным выходным сигналом.
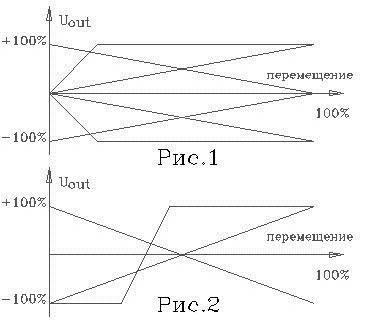 |
Как видно из рисунков:
1. Сигнал может увеличиваться или уменьшаться при увеличении размера датчика.
2. Сигнал может иметь положительную или отрицательную полярность во всех диапазонах перемещений или быть двуполярным.
3. Сигнал может иметь “0” значение в любой точке диапазона датчика.
Возможны изменения крутизны преобразования более чем в 10 раз.
Примечание: В настоящее время выпущена опытная партия линейных датчиков микронных перемещений (деформаций). В составе партии четыре модификации приборов с диапазонами ±50мкм (0-100мкм); ±100мкм (0-200мкм); ±250мкм (0-500мкм); ±500мкм (0-1000мкм).
По экспертным оценкам диапазоны указанных групп датчиков малых и микронных линейных перемещений покрывают около 70% потребностей в машиностроении.
Разработаны датчики близости с линейной и релейной характеристиками, которые поставляются по заказам.
Технические характеристики
| Тип прибора | ДЛП-02 | ДЛП-05 | ДЛП-1 | ДЛП-2 |
| Диапазон измерения, мм | от 0-1мм до 0-5мм | от 0-5мм до 0-10мм | от 0-10мм до 0-20мм | от 0-20мм до 0-50мм |
| Основная погрешность , % | 0.25; 0.5 | 0.25; 0.5 | 0.15; 0.25; 0.5 | 0.15; 0.25; 0.5 |
| Диапазон рабочих температур, `С | -30 ... +60 | -30 ... +60 | -30 ... +60 | -30 ... +60 |
| Дополнительная температурная погрешность “0” и шкалы, %/`С | 0.05 | 0.05 | 0.05 | 0.05 |
| Полоса пропускания (-3dB) ,Гц | 600 | 600 | 600 | 200 |
| Габариты датчика | d11x21 | d11x31 | d11x45 | d11x71 |
| Минимальная и максимальная длина датчика в рабочем положении, мм | 22 28 | 32 46 | 46 73 | 72 124 |
| Полный вес датчика, г | 5.8 | 8.6 | 11.8 | 18.7 |
| Вес подвижной части датчика, г | 2.5 | 3.6 | 5.2 | 7.9 |
| Напряжение питания, В | ±5 - ±15 | ±5 - ±15 | ±5 - ±15 | ±5 - ±15 |
| Потребляемый ток, мА | 3 | 3 | 3 | 3 |
| Выходной сигнал, В | от 0-±2 до 0-±10 | от 0-±2 до 0-±10 | от 0-±2 до 0-±10 | от 0-±2 до 0-±10 |
 |
Инклинометры ( Компания "Микросенсорные технологии")
Малогабаритные инклинометры с электрическим выходным сигналом, пропорциональным углу наклона датчика, являются сравнительно новыми приборами, доведенными до широкого промышленного применения в последние годы.
Их высокая точность, миниатюрные размеры, отсутствие подвижных механических узлов, простота крепления на объекте и низкая стоимость делают целесообразным использовать их не только в качестве датчиков крена, но и заменять ими угловые датчики, причем не только на стационарных, но и на подвижных объектах.
В качестве основных можно считать следующие области применения:
1. Долговременное определение положения различных высотных сооружений, плотин, стволов шахт, использование в системах горизонтирования платформ, определение величины прогибов и деформаций различного рода опор и балок.
2. Контроль углов наклона автомобильных и железных дорог при их строительстве, ремонте и эксплуатации.
3. Определение крена автомобилей, кораблей и подводных роботов, дорожных грейдеров и асфальтоукладчиков, подъемников и кранов, экскаваторов, сельскохозяйственных машин.
4. Определение направления бурения нефтяных и газовых скважин, использование в системах управления насосами нефтяных скважин.
5. Использование в роботах, станках и печатных прессах для контроля положения механизма, режущего органа или валика на печатных прессах.
6. Определение углового перемещения различного рода вращающихся объектов - валов, колес, механизмов редукторов как на стационарных, так и подвижных объектах.
7. Использование в приборах охранной сигнализации (в первую очередь автомобильных) и сейсмоакустического контроля.
Особенно полно могут использоваться возможности инклинометров на таком перспективном объекте для автоматизации, как автомобиль. Это работа их в системе автонавигации, определения профиля дороги, в системе горизонтирования салона, в системе автомобильного торможения ABS, системах охранной сигнализации. Они могут контролировать положение руля, положение заслонок и штоков, осуществляющих регулировку мощности двигателя и коробки передач, отопление и вентиляцию салона, следить за положением кресел и их спинок и т.п.
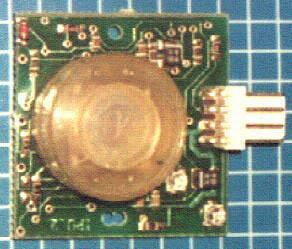
 |
Принцип действия: инклинометр представляет собой дифференциальный емкостной преобразователь наклона, включающий в себя чувствительный элемент в форме капсулы. Капсула состоит из подложки с двумя планарными электродами, покрытыми изолирующим слоем, и герметично закрепленным на подложке корпусом. Внутренняя полость корпуса частично заполнена проводящей жидкостью, которая является общим электродом чувствительного элемента. Общий электрод образует с планарными электродами дифференциальный конденсатор. Выходной сигнал датчика пропорционален величине емкости дифференциального конденсатора, которая линейно зависит от положения корпуса в вертикальной плоскости.
Инклинометр спроектирован так, что имеет линейную зависимость выходного сигнала от угла наклона в одной - так называемой рабочей плоскости и практически не изменяет показания в другой (нерабочей) плоскости, при этом его сигнал слабо зависит от изменения температуры. Для определения положения плоскости в пространстве используется два, расположенных под углом 90° друг к другу инклинометра.
Технические характеристики
| Тип прибора | ДК1-А | ДК1-В | ДК1-С | ДК1-2 | ДК1-3 |
| Полный диапазон | ±30°(60°) | ±60°(120°) | ±85°(170°) | ±150°(300°) | ±180°(360°) |
| Линейный диапазон | от ±1° (0°-2°)до ±20°(0°-40°) | от ±20°(0°-40°)до ±45°(0°- 90°) | от ±45°(0°-90°)до ±70°(0°-140°) | от ±70°(0°-140°)до ±135°(0°-270°) | от ±70°(0°-140°)до ±180°(0°-360°) |
| Порог чувствительности | 0.001° | 0.001° | 0.001° | 0.01° | 0.004° |
| Линейность , ±% | ±20°(40°) 0.25 - 0.5 | ±45°(90°) 0.25 - 0.75 | ±70°(140°) 0.25 - 0.75 | ±135°(270°) 2.5 | ±180°(360°) 2.5 |
| Повторяемость “0” | 0.03° | 0.05° | 0.06° | 0.1° | 0.1° |
| Диапазон рабочих температур, °С | -30 - +60 | -30 - +60 | -30 - +60 | -30 - +60 | -30 - +60 |
| Погрешность при поперечном наклоне до 45° | ±0.1% | ±0.1% | ±0.1% | ±1% | ±1% |
| Постоянная времени прибора | 0.1 | 0.15 | 0.25 | 0.5 | 0.4 |
| Полоса пропускания (-3dB), Гц | 5 | 3 | 2 | 0.5 | 0.1 |
| Погрешность от влияния радиочастотных помех | ±0.05° | ±0.05° | ±0.05° | ±0.2° | ±0.2° |
| Температурный коэффициент “0” | 0.006%/°С | 0.006%/°С | 0.006%/°С | 0.03%/°С | 0.08%/°С |
| Температурный коэффициент наклона характеристики | 0.025%/°С | 0.025%/°С | 0.025%/°С | 0.08%/°С | 0.08%/°С |
| Длительная стабильность (10000 часов) | ±0.25% | ±0.15% | ±0.15% | ±0.5% | ±0.5% |
Электронный блок питается от двухполярного напряжения ±5В - ±15В, потребляя при этом ток до 3мА (с учетом чувствительного элемента). При этом не требуется стабильность питающего напряжения и допускается его пульсация до 200мВ.
Выходной сигнал: однополярное или двухполярное постоянное напряжение, лежащее в пределах 0 - +2В...0 - +10В или 0 - ±2В...0 - ±10В с током нагрузки до 5мА. Выходное сопротивление - меньше 5 Ом. Напряжение пульсации на нагрузке - менее 0.1% номинального выходного сигнала.
Предусмотрена возможность юстировки диапазона измерения. Возможна механическая и электрическая юстировка “0” датчика. Максимальное удаление первичного преобразователя от электрического блока - до 20м. Максимальное удаление электронного блока от контрольного пункта - до 2000м.
По желанию Заказчика электронный блок может быть доукомплектован: для питания от однополярного источника питания +5В - +15В; для получения на выходе датчика заданного вида кода при работе в цифровых системах; элементами дистанционной перестройки диапазона и “0” внешним цифровым сигналом. Внешний вид инклинометров представлен на помещенных выше фотографиях.
Конструкция прибора Чувствительный элемент инклинометра выполнен в виде законченного конструктивного узла Ж23ґ10мм, весом 3.9 г и двух конструктивных исполнений электронных плат - первой круглой Ж36ґ9мм весом 5 г (тип IPU-1)и второй квадратной 36ґ36ґ9мм весом 5 г (тип IPU-2). При жестких требованиях к размеру и весу датчика на объекте может быть установлен только чувствительный элемент инклинометра, закрепленный на нем любым удобным для Заказчика способом, например, клеем при стационарной установке или скотчем, если необходимо часто переставлять прибор. В этом случае используется первый вариант исполнения - круглая электронная плата, устанавливаемая в любом удобном для Заказчика месте. В большинстве случаев используется второй вариант: чувствительный элемент устанавливается жестко на квадратной плате и это функционально законченное устройство крепится на объекте.
Примечание: рассмотренные выше инклинометры входят в систему датчиков, объединенных общим электронным блоком типа IPU-1 и общим конструкторским подходом.
Угловые датчики (Компания "Микросенсорные технологии")
Дата добавления: 2018-02-15; просмотров: 321; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!