ФУНКЦИОНАЛЬНАЯ СХЕМА УСТРОЙСТВА ПЛАВНОГО ПУСКА. НАЗНАЧЕНИЕ ФУНКЦИОНАЛЬНЫХ БЛОКОВ УПП
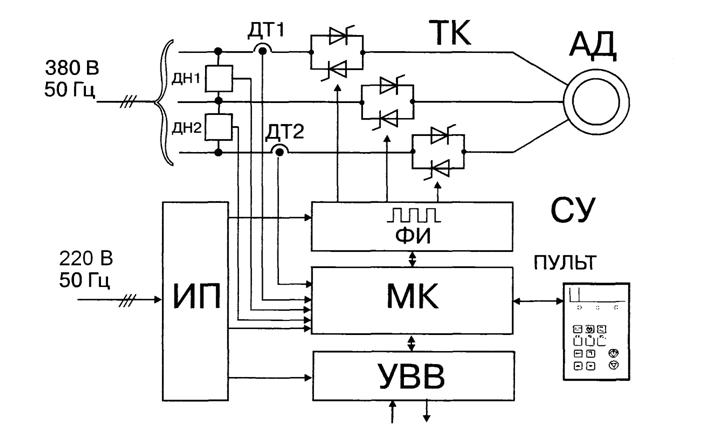
ТК– тиристорный комплект.
ИП – источник питания преобразует сетевое переменное напряжение 380 В в систему напряжений постоянного тока требуемых уровней и степени стабильности, гальванически связанных и не связанных между собой, для питания устройств правления.
МК – микропроцессорный контроллер осуществляет формирование режимов работы устройства с заданными параметрами с помощью сигналов управления: сигналов управления тиристорами, сигналов защиты и аварийного отключения, приёма и передачи внешних управляющих, задающих и информационных сигналов.
УВВ – устройство ввода/вывода предназначено для приёма и передачи внешних управляющих сигналов.
ФИ– формирователи импульсов (драйверы) предназначены для формирования требуемых уровней управляющих сигналов тиристоров, гальванического разделения силовых цепей и цепей управления тиристоров и МК.
ДТ1,2– датчики тока. ДН1,2– датчики напряжения.
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ. ДОСТОИНСТВА И НЕДОСТАТКИ СИСТЕМ.
Система подчиненного регулирования – это система последовательного включения контуров регулирования, число которых равно числу регулируемых координат.
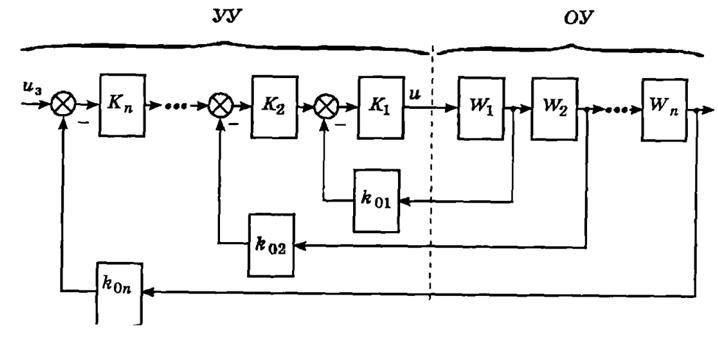
Все регуляторы соединяются между собой последовательно, так что заданием для каждого последующего регулятора является сигнал выхода предыдущего. На вход каждого регулятора подают отрицательную обратную связь по той переменной, которая регулируется данным.
Передаточные функции регуляторов Kn(p) выбирают по методу последовательной оптимизации, так чтобы получилась передаточная функция стандартного вида для замкнутого контура, то есть передаточная функция регулятора определяется структурой и параметрами соответствующего звена объекта регулирования, а также критерием оптимизации этого контура.
Достоинства: простота расчета регуляторов, высокое быстродействие.
Недостатки: уменьшение быстродействия системы по мере роста числа контуров.
КРИТЕРИИ ОПТИМИЗАЦИИ КОНТУРОВ ПРИ ПОДЧИНЕННОМ РЕГУЛИРОВАНИИ
 Каждый внутренний контур регулирования подлежит оптимизации, т. е. такому выбору параметров регулятора, при котором удовлетворяется заданное качество регулирования. Под заданным качеством регулирования понимается переходной процесс при ступенчатом входном сигнале, характеризующий определенную перерегулированием и быстродействием. Наибольшее распространение получили два критерия оптимизации: модульный (технический) и симметричный.
Каждый внутренний контур регулирования подлежит оптимизации, т. е. такому выбору параметров регулятора, при котором удовлетворяется заданное качество регулирования. Под заданным качеством регулирования понимается переходной процесс при ступенчатом входном сигнале, характеризующий определенную перерегулированием и быстродействием. Наибольшее распространение получили два критерия оптимизации: модульный (технический) и симметричный.
Модульный оптимум обеспечивает переходный процесс, близкий к оптимальному, при котором будет небольшое перерегулирование и относительно высокое быстродействие.
Симметричный оптимум характеризуется тем, что переходный процесс сопровождается перерегулированием 43% и с меньшим быстродействием, чем при настройке контура на модульный оптимум.
Основные понятия дисциплины.
Дата добавления: 2018-02-15; просмотров: 1762; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!