Перечислите основные компоненты СУДН космического аппарата и опишите их основные задачи.
Основные компоненты СУДН космического аппарата: солнечные датчики, магнитные датчики, датчики горизонта Земли, гироскопические датчики, маховики, магнитные исполнительные органы, двигатели малой тяги.
В целом СУДН КА вне зависимости от его назначения состоит из датчиков ориентации и исполнительных органов. Датчики ориентации по назначению разделяются на датчики углового положения и датчики угловой скорости. Исполнительные органы разделяются на инерционные исполнительные органы, электромагнитные исполнительные органы и реактивные двигатели.
Основные существующие на данный момент датчики углового положения функционируют на основе анализа информации из внешнего по отношению к корпусу КА пространства. К ним относят все датчики, использующие для своей работы оптическое излучение внешних по отношению к КА тел (Солнца, Луны, звезд, инфракрасное излучение Земли), а также датчики, измеряющие магнитное поле Земли, движение КА относительно окружающей Землю среды и т.п.
В составе современных СУДН КА различного назначения в качестве датчиков углового положения используются такие приборы, как:
- звездный датчик, определяющий свою ориентацию в пространстве на основе анализа текущего снимка звездного неба и его сопоставления с бортовым звездным каталогом;
- солнечный датчик, определяющий угловые координаты Солнца относительно системы координат прибора на основе выходных данных чувствительных элементов датчика, в качестве которых обычно используются ПЗС-матрицы, ПЗС-линейки и фотоэлектрические преобразователи;
- магнитный датчик, определяющий значение компонент вектора магнитной индукции магнитного поля Земли в результате функционирования чувствительных магнитных катушек прибора;
- датчик горизонта Земли, определяющий положение инфракрасного горизонта Земли в системе координат прибора в результате сканирования космического пространства с помощью специальных чувствительных элементов.
Из всех перечисленных датчиков углового положения наиболее точным является звездный датчик, кроме того это единственный датчик, который может давать в качестве выходного параметра текущее угловое положение КА.
Датчики угловой скорости - приборы, неподвижно установленные на корпусе КА и позволяющие измерять составляющую его вектора угловой скорости, параллельную оси чувствительности соответствующего датчика угловой скорости.
- инерционные исполнительные органы - маховики. В СУО с маховиками используется инерционное свойство вращающегося твердого тела. Управляющий момент маховика создается путем изменения скорости вращения самого маховика. Три таких маховика с осями, расположенными во взаимно-перпендикулярных направлениях, обеспечивают трехосную ориентацию и стабилизацию КА;
- электромагнитные исполнительные органы - магнитные катушки, магнитные контуры и гистерезисные стержни используются как для управления угловым положением, так и для управления угловой скоростью КА. Чаще всего они
используются для демпфирования колебаний КА и разгрузки маховиков. Выработка вращающего момента осуществляется в результате взаимодействия магнитных полей Земли и магнитного исполнительного органа;
- реактивные двигатели, производящие тягу за счет выброса топлива в сторону, противоположную движению КА. Использование парных малых реактивных двигателей в каждом канале управления КА может обеспечить его трехосную ориентацию.
15. Какой метод можно использовать для оптимальной оценки пространственного положения КА? Обоснуйте своей ответ.
Для оптимальной оценки пространственного положения КАбудем использовать: Солнечный датчик + Магнитный датчик + Фильтр Калмана. = более точная оценка.
Наиболее известными алгоритмами определения параметров движения МКА при условиях зашумленности или отсутствия некоторых измерений являются алгоритмы, разработанные на базе фильтра Калмана. Однако, несмотря на большую популярность фильтра Калмана как метода оценки параметров ориентации существует ряд факторов, которые серьезно влияют на его точность и сходимость:
1. проблема задания начальных приближений параметров углового движения.
2. проблема настройки ковариационных матриц ошибок.
Рассмотрим алгоритм определения углового положения и угловой скорости МКА на базе показаний магнитного и солнечного датчиков.
Фильтр Калмана в основном используется для систем, описываемых линейными уравнениями. Но теория фильтра Калмана может быть расширена и для случая нелинейных систем, путем их линеаризации. В нашем случае мы располагаем нелинейной непрерывной системой уравнений углового движения МКА с дискретными измерениями солнечного и магнитного датчиков, которые имеют общий вид:
 , (1)
, (1)
 , (2)
, (2)
где
 - вектор состояния системы;
- вектор состояния системы;
 - шум системы, представляющий собой Гауссовский случайный процесс с нулевым математическим ожиданием;
- шум системы, представляющий собой Гауссовский случайный процесс с нулевым математическим ожиданием;
 - вектор измерений;
- вектор измерений;
 - функция, представляющая собой модель измерений;
- функция, представляющая собой модель измерений;
 - шум измерений, представляющий собой Гауссовский случайный процесс с нулевым математическим ожиданием.
- шум измерений, представляющий собой Гауссовский случайный процесс с нулевым математическим ожиданием.
Задача фильтра Калмана заключается в том, чтобы найти оценку вектора состояния системы  , обозначаемую как
, обозначаемую как  , которая минимизирует среднеквадратичную ошибку
, которая минимизирует среднеквадратичную ошибку 
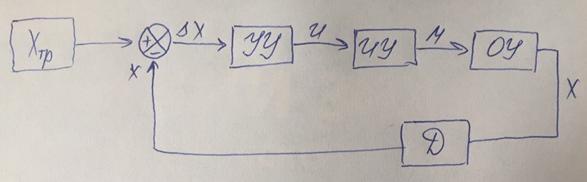
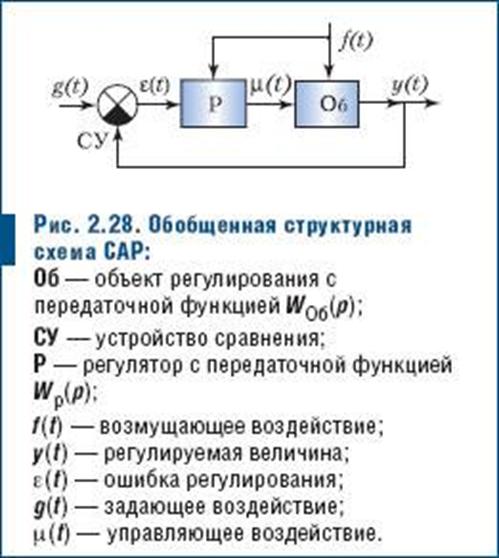
16. Опишите основную методику построения систем управления с обратной связью. Постройте и опишите схему управления движением КА с обратной связью.
2 Алгоритм демпфирования угловой скорости "−Bdot" Алгоритм "−Bdot" предназначен для демпфирования угловой скорости аппарата [6]. Управление реализуется дипольным магнитным моментом токовых катушек d k dt = - Β m , где k − постоянный коэффициент. Из формы записи дипольного момента становится понятной логика работы алгоритма: исходя из информации о вращении вектора геомагнитной индукции в ССК, формируется момент, фактически вращающий спутник в обратном направлении. Для работы алгоритма требуются только измерения магнитного поля Земли, получаемые с помощью магнитометра. Алгоритм "−Bdot" автоматически включается в ручном режиме управления стабилизацией в двух случаях: при включении питания системы ориентации, если до выключения система уже работала в этом режиме, или если данных об ориентации нет или они устарели, а также в 8 автоматическом режиме стабилизации, если модуль угловой скорости, грубо оцениваемый только с помощью измерений магнитометра, больше порогового значения, равного 0.5°/с. Если же в автоматическом режиме в результате работы алгоритма модуль угловой скорости становится меньше этого значения, то включается алгоритм грубой оценки трёхосной ориентации TRIAD и управление передается маховичной системе. В случае работы в ручном режиме решение об использовании другого алгоритма принимает оператор из ЦУПа.
17. Опишите принцип построения системы управления движением КА на основе ПИД-регулятора.
ПИД-регулятор – это устройство в контуре управления с обратной связью, используемое для поддержания заданного значения измеряемого параметра. Он имеет три составляющих: пропорциональную, интегральную и дифференциальную. Входной сигнал, поступивший в ПИД-регулятор, проходит через все его составляющие, после чего выходной сигнал регулятора определяется суммой усиленных составляющими сигналов. Для изучения работы ПИД-регулятора в MATLAB моделируется система управления движением объекта с регулятором (рис. 1) и на основе полученных графиков рассматривается воздействие каждой составляющей регулятора на систему.
Для построения модели системы управления объектом с ПИД- регулятором в MATLAB предусмотрено программное приложение SIMULINK. Построение модели в SIMULINK осуществляется из библиотеки стандартных блоков. Основным блоком, используемым для построения модели управления объектом с ПИД-регулятором, является Transfer Fcn – передаточная функция. Блок Step используется в качестве источника сигналов; блок Scope – устройства вывода, содержит результаты моделирования в виде графиков.
Результаты моделирования в MATLAB, выведенные в виде графика, наглядно показывают влияние каждой составляющей ПИД-регулятора на систему управления движением объекта, в данном случае судна: пропорциональная составляющая – выдает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, но при этом использование только П-регулятора не позволяет стабилизировать значение регулируемой величины на заданном значении в связи с возникновением статической ошибки; дифференциальная составляющая – обеспечивает минимальную длительность переходного процесса, устраняет автоколебания; интегральная составляющая – устраняет статическую ошибку, что позволяет стабилизировать значение регулируемой величины на заданном значении. Использование MATLAB в изучении ПИД-регулятора в системе управления движением объекта, а также при изучении других устройств, позволяет самостоятельно смоделировать систему, провести с ней ряд экспериментов и наглядно рассмотреть результаты всех экспериментов. Основная польза использования MATLAB в процессе обучения техническим специальностям заключается в возможности создания и проведение экспериментов с моделью такого объекта или устройства, с которым, по определенным причинам, невозможно проведение экспериментов.
Дата добавления: 2018-02-15; просмотров: 1005; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!