Ответы на третий вопрос в форме таблицы
Практическая работа
Тема: Изучение типовых схем и аналоговых устройств на базе ОУ
Цель: Исследование усилительных свойств операционного усилителя (ОУ); изучение типовых схем и аналоговых устройств на базе ОУ.
Часть 1
Унифицированная блочная система регулирования УБСР служит примером реализации цифровых устройств управления. Использование этой системы обеспечивает широкую унификацию производства комплектных средств управления, упрощает проектирование, наладку и эксплуатацию ЭП, улучшает технико-экономические показатели их работы.
Система УБСР имеет несколько ветвей:
1) УБСР–А – аналоговая на обычных элементах;
2) УБСР–АИ – аналоговая на интегральных микросхемах (ИМС);
3) УБСР–Д – дискретная на обычных элементах;
4) УБСР–ДИ – дискретная на ИМС.
Основным элементом аналоговой системы УБСР является операционный усилитель(ОУ). При включении во входные цепи и цепи обратной связи наряду с резисторами конденсаторов, ОУ позволяет осуществлять преобразования входных сигналов, необходимых для получения нужных управляющих воздействий в ЭП. Такие схемы получили название регуляторов. Регуляторы используются в системах автоматического управления ЭП для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. Данные параметры влияют на скорость выхода системы на установившийся режим, а также на перерегулирование. В зависимости от выполняемых ими функциональных преобразований входных сигналов в выходные различают пропорциональные, интегральные, дифференциальные другие типы регуляторов (ПИ,ПД,ПИД).
|
|
|
Пропорциональный П- (рисунок 1,а) регулятор осуществляет масштабное (пропорциональное) преобразование входного сигнала с постоянным коэффициентом k=Rос/R1;вид этого преобразования Uвых= - kUвх, где k= Rос /R1- параметр регулятора. Переходная функция имеет вид, представленный на рисунке1 ,б

Рисунок 1 - Пропорциональный П – регулятор
Знак (–) отражает тот факт, что регулятор включается в систему по принципу отрицательной обратной связи. Статическая ошибка регулирования зависит от коэффициента усиления объекта и параметра настройки регулятора. Статическая ошибка тем меньше, чем больше значение параметра настройки K.
В интегральном И-регуляторе (рисунок 2,а) в цепь ОС ОУ включают конденсатор Сос, а во входную цепь – резистор R1. Параметр регулятора T=R1Сос, вид реализуемого преобразования
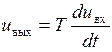
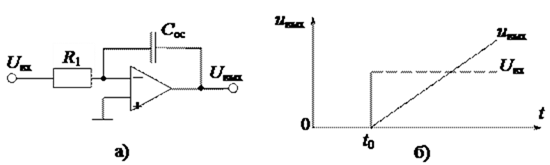
Рисунок 2 - Интегральный И регулятор
Переходной процесс в системе регулирования с И-регулятором, характеризуется отсутствием статической ошибки регулирования, наибольшим временем регулирования.
|
|
|
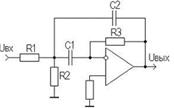
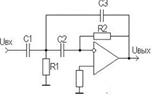
Пропорционально-интегральный регулятор (рисунок3) осуществляет комбинированный закон регулирования, благодаря чему сочетает начальное быстродействие П-регулирования, со свойством И-регулирования превращать контур в астатическую систему, работающую без статической ошибки.

Рисунок 3 -Пропорционально-интегральный регулятор
В начале процесса регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки
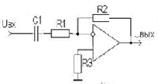
Дифференциальный Д–регулятор( рисунок 4, а) обеспечивает дифференцирование входного сигнала с коэффициентом T=RосС1; вид такого преобразования электрический импульс бесконечно большой амплитуды и малой длительности (рисунок.4,б).
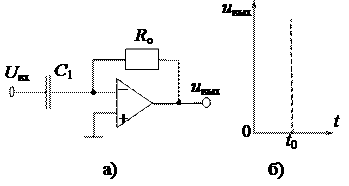
Рисунок 4 -Дифференциальный Д–регулятор
Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора, так как в этом случае регулятор реагирует не на абсолютное значение регулируемой величины, а на скорость ее изменения.
|
|
|
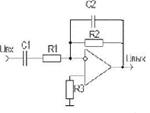
ПИД-регулятор сочетает в себе достоинства всех трех простейших законов регулирования: высокое быстродействие благодаря наличию импульса по производной от Δy(t) и отсутствие статической ошибки, которое обеспечивает пропорциональная составляющая.
Рисунок 5 –Электрическая схема ПИД-регулятора
Пропорционально-интегральнодифференциальный (ПИД)регулятор является
наиболее распространенным регулятором. Достоинства: относятся простота построения и промышленного использования; невысокая стоимость; высокая эффективность в
решении практических задач.
Применение регуляторов с дифференциальными составляющими ( ПД- или ПИД), несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот импульс будет поступать в регулятор по истечении времени чистого запаздывания после прихода возмущения, за которое в объекте могут накопиться большие отклонения. Более того, в таких случаях ПД- или ПИД-регулятор может "раскачать" объект и система потеряет устойчивость.
ДИФФЕРЕНЦИАЛЬНАЯ СОСТАВЛЯЮЩАЯ УЧАСТВУЕТ ТОЛЬКО В СЛОЖНЫХ ЗАКОНАХ РЕГУЛИРОВАНИЯ ДЛЯ УЛУЧШЕНИЯ КАЧЕСТВА ПЕРЕХОДНОГО ПРОЦЕССА.
|
|
|
Задание 1
а) По заданным в таблице 1 значениям Rос и R1 = 10 кОм рассчитать параметр П-регулятора, если Uвх =1 В.
Таблица1
| Вариант | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Rос, кОм | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
| Вариант | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| Rос, кОм | 110 | 120 | 130 | 140 | 150 | 160 | 170 | 180 | 190 |
| Вариант | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| Rос, кОм | 200 | 210 | 220 | 230 | 240 | 250 | 260 | 270 | 280 |
б) Нарисовать схему .
Задание 2
а) Нарисовать схему П—регулятора (вычитателя ).
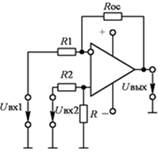 Uвых=(Uвх2 –Uвх1) Rос /R1
Uвых=(Uвх2 –Uвх1) Rос /R1
б) Рассчитать параметр П—регулятора, если Rос = 10 кОм, на входы подать Uвх1 и Uвх2. Результаты записать в таблицу 2
Таблица 2
| Вариант | Uвх1, мВ | Uвх2, мВ | Uвых, мВ | К |
| 1 | 1 | 2 | 10 | |
| 2 | 1 | 3 | 12 | |
| 3 | 3 | 4 | 14 | |
| 4 | 2 | 5 | 16 | |
| 5 | 3 | 6 | 18 | |
| 6 | 4 | 7 | 20 | |
| 7 | 7 | 8 | 22 | |
| 8 | 6 | 9 | 24 | |
| 9 | 5 | 10 | 26 | |
| 10 | 2 | 4 | 10 | |
| 11 | 3 | 7 | 12 | |
| 12 | 4 | 6 | 14 | |
| 13 | 5 | 5 | 16 | |
| 14 | 6 | 2 | 18 | |
| 15 | 7 | 3 | 20 | |
| 16 | 8 | 4 | 22 | |
| 17 | 9 | 5 | 24 | |
| 18 | 10 | 6 | 26 | |
| 19 | 7 | 7 | 18 | |
| 20 | 8 | 8 | 20 | |
| 21 | 5 | 4 | 12 | |
| 22 | 6 | 7 | 14 | |
| 23 | 7 | 6 | 16 | |
| 24 | 8 | 5 | 18 | |
| 25 | 9 | 2 | 20 | |
| 26 | 10 | 3 | 22 | |
| 27 | 7 | 4 | 24 |
Задание 3
а) Нарисовать схему П—регулятора ( сумматора.
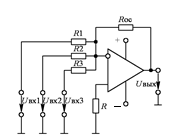 U вых= -( R ос / R 1 U вх1+ R ос / R 2 U вх2 + + R ос / Rn U вх n )
U вых= -( R ос / R 1 U вх1+ R ос / R 2 U вх2 + + R ос / Rn U вх n )
б) Подобрать резисторы для получения нужной суммы. Варианты смотри в таблице 3.
Таблица 3
| № вар | Uвх | Uвых мВ | № вар | Uвх | Uвых мВ |
| 1 | Uвх1= Uвх2= Uвх3 | 30 | 14 | Uвх1= Uвх2= Uвх3 | 4 |
| 2 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 50 | 15 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 6 |
| 3 | Uвх2= Uвх3 Uвх1= Uвх2 | 70 | 16 | Uвх2= Uвх3 Uвх1= Uвх2 | 8 |
| 4 | Uвх1= Uвх3 Uвх2=2 Uвх1 | 90 | 17 | Uвх1= Uвх3 Uвх2=2 Uвх1 | 10 |
| 5 | Uвх1= Uвх2= Uвх3 | 110 | 18 | Uвх1= Uвх2= Uвх3 | 12 |
| 6 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 130 | 19 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 14 |
| 7 | Uвх2= Uвх3 Uвх1= Uвх2 | 150 | 20 | Uвх2= Uвх3 Uвх1= Uвх2 | 18 |
| 8 | Uвх1= Uвх3 Uвх2=2 Uвх1 | 170 | 21 | Uвх1= Uвх3 Uвх2=2 Uвх1 | 20 |
| 9 | Uвх1= Uвх2= Uвх3 | 190 | 22 | Uвх1= Uвх2= Uвх3 | 24 |
| 10 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 210 | 23 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 14 |
| 11 | Uвх2= Uвх3 Uвх1= Uвх2 | 21 | 24 | Uвх2= Uвх3 Uвх1= Uвх2 | 22 |
| 12 | Uвх1= Uвх3 Uвх2=2 Uвх1 | 18 | 25 | Uвх1= Uвх3 Uвх2=2 Uвх1 | 24 |
| 13 | Uвх1= Uвх2= Uвх3 | 20 | 26 | Uвх1= Uвх2, Uвх3=2 Uвх1 | 10 |
Отчет содержит:
- цель работы;
- задание на выполнение (согласно варианта);
Вариант задания определяется по порядковому номеру журнала.
Контрольные вопросы к 1 части практической работы
1. Почему в усилителях используют отрицательную обратную связь?
2.Что осуществляет пропорциональный П-регулятор?
3.От каких элементов схемы зависит параметр пропорционального П-регулятора ?
4. От чего зависит статическая ошибка регулирования в П-регуляторе ?
5. Чем характеризуется переходной процесс в системе регулирования с И-регулятором ?
6.Что представляет пропорционально-интегральный регулятор
7. Какие достоинства сочетает в себе ПИД регулятор ?
8. Какой из законов регулирования физически не реализуется?
9. Что дает введение в закон регулирования дифференциальной составляющей?
Часть II
Активные фильтры на ОУ, предназначены для избирательного выделения полезного сигнала из смеси шумов, помех и самого сигнала.
Фильтры характеризуются полосой пропускания, в которой ослабление мало.
По расположению на шкале частот полосы пропускания различают следующие фильтры:
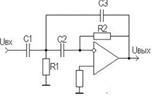
нижних частот (ФНЧ) , в которых полоса пропускания располагается на шкале частот от w=0 до некоторой граничной частоты w=wв, (рис. 1, а);
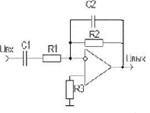
верхних частот (ФВЧ) с полосой пропускания от частоты w=wн, до бесконечно больших частот, (рис. 1, б);
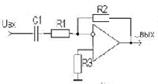
полосовые (ПФ), в которые полоса пропускания wн…wв располагается между полосами (рис. 1, в);
заграждающие (режекторные) (ЗФ или РФ), в которых между полосами пропускания 0…wп1 и wп2…∞ находится полоса непропускания wз1…wз2 (рис. 6, г).
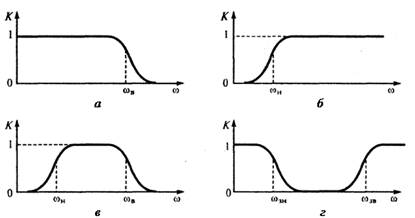
Рисунок 6 –Полоса пропускания фильтра
Фильтры первого порядка
Передаточные функции простейших фильтров представляют собой уравнения первого порядка, поэтому и фильтры называются фильтрами первого порядка. Наклон логарифмической АЧХ (ЛАЧХ) за пределами полосы пропускания у фильтров первого порядка составляет всего –20 дБ/дек, что свидетельствует о плохих избирательных свойствах таких фильтров.
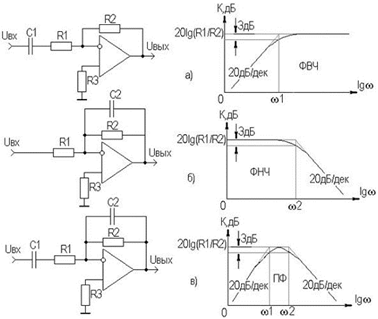
Рисунок 7- Фильтры первого порядка
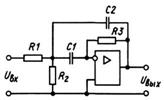
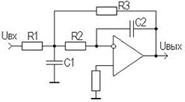
На практике наиболее часто в качестве фильтров используют ОУ с цепями ОС, работа которых описывается уравнениями второго порядка. Если увеличить порядок фильтров можно увеличить крутизну спада ЛАЧХ, наклон асимптот у них может достигать 40дБ/дек.

Рисунок 8- Фильтры второго порядка
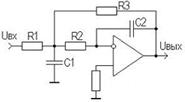
Переход от ФНЧ к ФВЧ, как видно из рисунков осуществляется заменой резисторов на конденсаторы, и наоборот. В ПФ имеются элементы ФВЧ и ФНЧ.
Достоинство фильтров на основе ОУ:
Активные фильтры, выполненные на основе ОУ позволяют получать стабильные частотно-избирательные цепи в диапазоне частот от 0 до 100 кГц. Применение активных фильтров на ОУ в области низких частот позволяет избавиться от громоздких конденсаторов и катушек индуктивности, которым, кроме всего прочего, присущи большие потери.
Контрольные вопросы ко 2 части практической работы
1 Дайте определение фильтра.
2 Как классифицируют фильтры в зависимости от полосы пропускаемых частот?
3. Сделайте соответствие между схемой фильтра, полосой пропускаемых частот и АЧХ
| Схема | Назначение | АЧХ |
 1 1
| ФНЧ | 
|
 2 2
| ФВЧ | 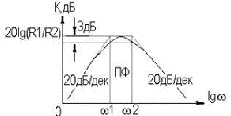
|
 3 3
| ПФ | 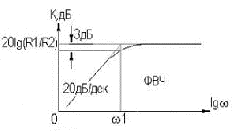
|
 4 4
| ФНЧ | 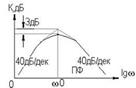
|
 5 5
| ФВЧ | 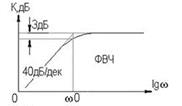
|
 6 6
| ПФ | 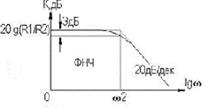
|
 7 7
| ФВЧ | 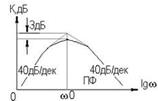
|
Ответы на третий вопрос в форме таблицы
| Схема | Назначение | АЧХ |
 1 1
| ПФ | 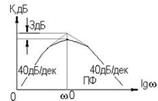
|
 2 2
| ||
 3 3
| ||
 4 4
| ||
 5 5
| ||
 6 6
| ||
| 7
|
Дата добавления: 2021-04-15; просмотров: 118; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!