Г. Системы линейные и нелинейные
Л и н е й н о й называется система, которая описывается линейными уравнениями. В противном случае система является н е л и н е й н о й. Чтобы система была нелинейной, достаточно иметь в ее составе хотя бы одно нелинейное звено, т. е. звено, описываемое нелинейным уравнением.
Для линейных систем справедлив п р и н ц и п с у п е р п о з и ц и и . Он заключается в том, что реакция системы на любую комбинацию внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных на систему порознь. Принцип суперпозиции позволяет выразить реакцию системы на любое произвольное воздействие через реакцию системы на элементарное типовое воздействие, например, в виде ступеньки. Для этого достаточно представить данное входное воздействие в виде совокупности выбранпых типовых воздействий. Благодаря принципу суперпозиции разработана общая теория линейных систем автоматического управления, описываемых линейными дифференциальными уравнениями любого порядка.
К нелинейным системам принцип суперпозиции не применим. Нет и общей теории нелинейных дифференциальных уравнений, на основе которой могла бы быть создана общая теория нелинейных систем автоматического управления. Существует лишь ряд частных методов для решения некоторых видов нелинейных уравнений невысокого порядка. Вместе с тем, если не ограничивать диапазона изменения входных воздействий, то все реальные системы автоматического управления оказываются нелинейными. Трудность исследования нелинейных систем заставляет упрощать их описание. Желательным пределом такого упрощения является приближенное описание их линейными -уравнениями, хотя бы в некоторых из интересующих нас режимов. Это называется л и н е а р и з а ц и е й нелинейных систем. В тех случаях, когда линеаризация невозможна, прибегают к приближенным методам исследования нелинейных систем с учетом их нелинейностей.
|
|
|
Д. Системы стационарные и нестационарные
С т а ц и о н а р н о й называется система, все параметры которой не изменяются во времени. Н е с т а ц и о н а р н а я система – это система с переменными параметрами. При математическом описании нестационарной системы это проявляется в том, что некоторые- коэффициенты
10
дифференциального уравнения системы являются функциями времени.
В соответствии с данным определением, в отличие от нестационарной системы, реакция стационарной системы на одно и то же воздействие не зависит от момента приложения этого воздействия.
Е. Системы непрерывного и дискретного действия САУ бывают непрерывного или дискретного действия в зависимости
|
|
|
от характера действия составляющих систему звеньев.
| С и с т е м а | н е п р е р ы в н о г о | д е й с т в и я , или, короче, | |||
|
| |||||
| н е п р е р ы в н а я | с и с т е м а , состоит только из звеньев непрерывного | ||||
действия, т. е. звеньев, выходная величина которых изменяется плавно при
| плавном изменении входной величины. | ||||||
| С и с т е м а | д и с к р е т н о г о | д е й с т в и я , | и л и | д и с - | ||
| к р е т | н а я с и с т е м а , – это система, | содержащая хотя бы одно звено | ||||
дискретного действия. Звеном дискретного действия называется звено, выходная величина которого изменяется дискретно, т. е. скачками, даже при плавном изменении входной величины . (Скачки выходной величины могут происходить либо при прохождении входной величиной определенных пороговых значений – звено релейного, действия , либо через определенный интервал времени – звено импульсного действия.)
Ж. Адаптивные и неадаптивные системы
|
|
|
А д а п т и в н ы е , и л и с а м о п р и с п о с а л и в а ю щ и е с я ,
системы обладают способностью приспосабливаться к изменению внешних условий работы, а также улучшать свою работу по мере накопления опыта. Н е а д а п т и в н ы е , или, как их еще называют, о б ы к н о в е н н ы е , с и с т е м ы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы обыкно-венной системы ее настройку требуется изменить для того, чтобы сохранить заданное качество управления (например, точность, быстродействие), эту перенастройку должен сделать человек. В случае адаптивной системы это осуществляется автоматически самим управляющим устройством системы.
Область применения адаптивных САУ – это управление объектами, свойства или условия работы которых недостаточно известны или существенно непостоянны. В этих условиях обыкновенная, неадаптивная, система либо будет работать неудовлетворительно, либо потребует постоянного надзора.
Усилительные органы
Выходные сигналы датчиков и других элементов, как правило, очень слабые и не могут использоваться непосредственно для приведения в действие элементов систем автоматики. Выходная мощность датчиков в большинстве случаев составляет сотые, тысячные доли ватта, тогда как мощность, необходимая для управляющего органа, может достигать десятков и даже сотен киловатт. Поэтому в современных автоматических системах управления широко применяют усилительные элементы (усилители), которые нередко наряду с основным назначением усиливать мощность сигнала выполняют и функцию его преобразования в вид, более удобный для работы системы.
|
|
|
Усилителем называется устройство, предназначенное для увеличения мощности сигнала за счет энергии дополнительного источника питания, при этом выходная (усиленная) величина является функцией входного сигнала и имеет одинаковую с ним физическую природу.
Усилители различают по выходной мощности, виду подводимой вспомогательной энергии, коэффициенту усиления, принципу действия, по форме характеристики, выражающей зависимость между выходной и входной величинами, и по ряду иных признаков.
Для достижения таких значений необходимо включить последовательно несколько усилителей автоматики.
Единицы измерения входных и выходных сигналов усилителей одинаковые. Ими могут быть единицы мощности (Вт; кВт), напряжения (В), тока (А), скорости (м/с), давления (Па), силы (Н) и т.д. Соответственно единицам измерения величин коэффициент усиления может быть назван коэффициентом усиления по току, напряжению, давлению, но основным считают коэффициент усиления по мощности.
Коэффициент усиления усилителей достигает тысяч, сотен тысяч и даже более раз. В электрических усилителях различают усиление по мощности, напряжению и току.
Коэффициент усиления по мощности в зависимости от принципа действия и конструкции усилителя может составлять от 1 до 107.
Усилению могут подвергаться не только электрические параметры, но и другие входные величины (перемещение, скорость, усиление, давление и т. п.). Усилительный элемент совместно с резисторами, конденсаторами и другими элементами схемы называют усилительным каскадом. Если усиления сигнала одним каскадом недостаточно, применяют соединение нескольких каскадов, выполняющих роль предварительного усиления и обеспечивающих работу мощного выходного каскада. Поэтому различают однокаскадные и многокаскадные усилители, при этом в многокаскадном усилителе первый каскад от входа называется входным, а последний выходным.
Электронные усилители (ЭУ) широко применяются в системах автоматики для предварительного усиления сигналов, получаемых от датчиков. Предварительная выходная мощность усилителей на превышает 100 Вт (Ватт). К ним относятся усилители постоянного и переменного тока: ламповые, полупроводниковые, операционные, электромашинные, электромеханические и магнитные.
Полупроводниковые усилители характеризуются незначительной мощностью потребления, достаточной надежностью, высоким быстродействием, сравнительно большим коэффициентом усиления, малыми размерами и поэтому вытеснили ламповые усилители из многих сфер применения. Они могут работать на постоянном и переменном токе. По способу включения полупроводниковых триодов эти усилители делятся на три основных вида: с общей базой, с общим коллектором и с общим эмиттером.
Тиристорный усилитель. В качестве его основного усиливающего элемента используется тиристор, который в зависимости от числа выводов и назначения называется динистором, тринистором и семистором.
Динистор – это тиристор с двумя выводами (рис. 1). Для его включения необходимо, чтобы напряжение на нем превысило так называемое напряжение включения. Отключение динисторов происходит при снятии напряжения питания или уменьшении тока нагрузки до уровня тока выключения.
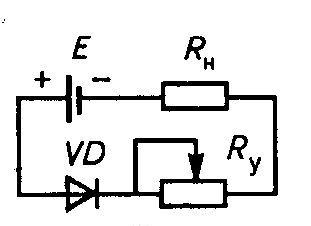
Рисунок 1. Схема включения тиристоров.
Тринистор – это тиристор с тремя выводами (рис. 2). Он включается при подаче напряжения включения или тока управления Iу на специальный управляющий электрод. Тринистор включается током управления Iу, сдвинутым по фазе относительно тока нагрузки Iн, с помощью специального фазосдвигающего устройства (ФСУ).
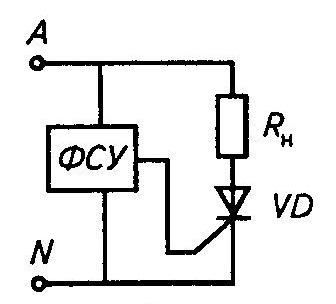
Рисунок 2. Статическая деформация тиристоров.

Рисунок 3. Диаграмма токов работы тиристора.
Отключение тринистора происходит при изменении полярности его напряжения питания или уменьшении тока нагрузки Iн до значения тока выключения. При питании тринистора переменным током (рис. 3) напряжение питания в течение каждого полупериода проходит через нуль, что создает естественные условия для отключения тиристора.
Семистор – это тиристор с четырьмя выводами. В нем предусмотрена возможность управлять переключением цепи переменного тока в течение положительного и отрицательного полупериодов переменного напряжения.
Магнитный усилитель представляет собой электромагнитный аппарат, принцип действия которого основан на зависимости магнитной проницаемости ферромагнитного сердечника с катушкой переменного тока от подмагничивающего действия постоянного тока.
Чем больше постоянный ток в обмотке управления, тем сильнее магнитный поток, создаваемый обмоткой управления, а следовательно, тем выше насыщение сердечника. При этом магнитная проницаемость сердечника уменьшается, что приводит к снижению индуктивности рабочих обмоток, падению их реактивного сопротивления и увеличению тока нагрузки. Таким образом, незначительные изменения постоянного тока управления в подмагничивающей обмотке вызывают весьма существенные изменения переменного тока в рабочей обмотке. В этом и заключается эффект усиления магнитного усилителя. Характеристика магнитного усилителя – это зависимость тока нагрузки от подмагничивающего постоянного тока.
Преимущества магнитных усилителей: простое устройство, высокие коэффициент усиления, КПД, надежность и большой срок службы, отсутствие подвижных частей, нечувствительность К. температуре, ударам и вибрационным нагрузкам.
К недостаткам усилителей относятся большие габаритные размеры, масса и инерционность. Из-за больших постоянных времени они применимы только для усиления низкочастотных сигналов.
Гидравлические и пневматические усилители применяют в автоматических системах для усиления сигналов по мощности. Принципиальные схемы таких усилителей практически не отличаются одна от другой. Если в гидравлических усилителях перемещение исполнительного органа происходит под действием жидкости, поступающей от специального насоса, то в пневматических рабочей средой является воздух, нагнетаемый специальным компрессором. Различают два класса гидравлических усилителей: дроссельные и струйные.
Автоматизация Санитарных Систем
Морские суда обычно оборудуются независимыми трубопроводами питьевой, мытьевой и забортной воды. Питьевая вода подается в камбуз и к кипятильникам, а также в умывальники. В банях и прачечных используется пресная мытьевая вода. Холодная и горячая забортная вода подводится в туа-леты, а также используется для охлаждения кипятильников и питания опреснительных установок. Трубопроводы каждой системы водоснабжения имеют свои отличительные знаки. На трубах забортной и мытьевой воды накрашивают два узких отличительных кольца зеленого цвета. Трубопровод питье-вой воды имеет отличительные кольца, между которыми наносят предупреждающее кольцо синего цвета. К качеству питьевой воды предъявляют очень строгие требования. Поэтому хранение питьевой воды н судне производится в специальных вкладных цистернах, не соприкасающихся с забортной водой и цистернами топлива. Для замера уровня врды цистерны оборудованы водомерными стеклами или дистанционными уровнемерами. Применять футштоки для определения количества питьевой воды запрещается. Мытьевую воду на судах обычно хранят в отсеках двойного дна, изготовленных из нержавеющей стали и оборудованных бактерицидными установками.
Напор в системе создается с помощью пневмоцистерны. Принцип ее действия состоит в том, что приподаче воды в герметически закрытую цистерну в верхней части сжимается воздух. Повышенное давление в пневмоцистерне используется для подачи воды в расходную магистраль.
Нормальная работа систем водоснабжения и их содержание в исправном состоянии обеспечиваются повседневными наблюдением и уходом. Особенно тщательно следует наблюдать за состоянием питьевой воды: цистерны, в которых она хранится, необходимо регулярно очищать и окрашивать. Запасы воды можно хранить в цистернах зимой не более 7, а летом 5 сут. Для увеличения сроков хранения система питьевой воды оборудуется ионизационными бактерицидными установками.
Системы канализации
Для удаления различных нечистот и загрязнений воды на судах имеются три канализационные системы: фановая, сточная и шпигатная. Фановая служит для удаления нечистот (фекальных вод) из туалетов, сточная - воды из умывальников, бань, душевых, прачечных и т.п. Вода с открытых палуб удаляется за борт шпигатной системой. Отличительный знак труб канализационных систем - два узких кольца черного цвета.
Современные морские суда имеют фаново-сточную систему закрытого типа (рис. б). При такой системе загрязненная вода и нечистоты отводятся в специальные сборные цистерны, опорожнение которых производится в открытом море, а при стоянке в порту - в плавучие станции сбора фекаль-ных вод. Удаление нечистот производится фекальным насосом, который имеет устройство для автоматического пуска при заполнении цистерны. При стоянке судна в порту, а также при плавании в водах с санитарным режимом автоматика должна быть отключена. Трубопровод сброса имеет два вывода за борт - ниже и выше ватерлинии. Верхним сбросом пользуются при сливе нечистот в плавучие емкости.
У выхода за борт отливной трубопровод имеет невозвратно-запорный клапан.
Из санитарных помещений фекальные и сточные воды поступают в цистерны самотеком по фаново-сточному трубопроводам. Трубопровод фановой системы выполняется из стальных оцинкованных труб диаметром не менее 100 мм. Такой диаметр обеспечивает быстрое и надежное прохождение фекальных вод при уклоне не менее 0,05° (угол к горизонту около 5°). Для сточного трубопровода применяют трубы меньшего диаметра. Чтобы в помещение не проникал неприятный запах, на сточных и фановых трубах устанавливают водяные затворы, представляющие собой изгибы труб, где задерживается вода, которая препятствует проходу газов. С этой же целью под умывальниками устанавливают отстойники.
Шпагатная система состоит из палубных шпигатов и спускных труб. Спускные трубы доводят только до нижележащей палубы, так что спуск воды производится последовательным пере пуском с самой верхней палубы на все палубы, расположенные ниже, а с нижней из открытых палуб вода спускается за борт. Забортные отверстия спускных труб могут быть расположены как непосредственно у палубы, так и у ватерлинии. Второе лучше, так как в этом случае на борту не будет подтеков загрязненной воды.
Дата добавления: 2021-04-06; просмотров: 176; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!