Схема и краткое описание привода.
Следящий привод возвратно-поступательного движения используется
в оптико-механических приборах и устройствах, системах управления, механических устройствах РЭА и ЭВМ, робототехнике и других устройствах. Применение шагового двигателя в следящем приводе позволяет включать это привод непосредственно в контур управления общей управляющей ЭВМ и делает ненужным сигнал обратной связи.
.При разработке конструкции следует исходить из условия получения минимального приведенного момента инерции привода.
В конструкции привода надо предусмотреть ограничители движения (как механические, так и электрические), а также защиту механизма от перегрузок с помощью предохранительной муфты.
Литература [1,2,3,4,5,6,7,11,12,13,22,23].
Тема проекта №5(8)
Механизм линейных перемещений
Техническое задание: разработать конструкцию следящего привода линейного перемещения по предложенной схеме в соответствии с заданным вариантом.
Основные исходные данные:
| № варианта |
I |
2 |
3 |
4 |
5 |
6 | ||
| Параметры | ||||||||
| Сила на выходном звене F, Н | 500 | 450 | 400 | 400 | 450 | 500 | ||
| Скорость движения выходного звена V , м/с | 0,008 | 0,01 | 0,012 | 0,014 | 0,016 | 0,01 | ||
| Ход выходного звена S , мм | 60 | 70 | 80 | 90 | 65 | 75 | ||
| Диаметр и шаг винта выходной пары d / p , d и p , мм | 12/3 | 10/3 | 10/3 | 12/3 | 12/3 | 14/3 | ||
| Тип предохранителя муфты |
Шариковая |
Фрикционная
|
Кулачковая
| |||||
| Критерий проектирования |
Равнопрочность |
Min погрешности |
Min габаритов | |||||
| Тип электродвигателя | Переменного тока (ДАТ и др.) | |||||||
| Тип корпуса | По согласованию с преподавателем | |||||||
| Ограничитель движения | Механические упоры и микровыключатели | |||||||
| Вид крепления к основному изделию | По согласованию с преподавателем | |||||||
| Вывод выходного винта | По согласованию с преподавателем | |||||||
| Вид выходного конца | По согласованию с преподавателем | |||||||
| Условия эксплуатации | УХЛ 4.1 | |||||||
| Степень защиты | IP22 | |||||||
Дополнительные указания :
· линейные перемещения выходного звена обеспечиваются с помощью передачи винт-гайка на выходе механизма;
· для передачи винт-гайка использовать трапецеидальную резьбу;
· число заходов винта z = 1;
· при предварительном расчете принять КПД всего привода η = 0,6.
Расчетно-пояснительная записка помимо типового содержания должна включать расчет винта: на прочность, устойчивость и смятие резьбы.
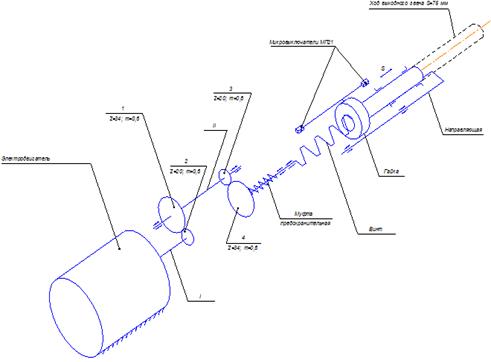
Схема и краткое описание механизма.
Механизмы линейных перемещений широко используются для преобразования вращательного движения в поступательное в устройствах РЭА, оптико-механических приборах, авиационных приборах, робототехнике и медицинской технике. Кинематическая схема одного из возможных вариантов механизма линейных перемещений с выходной парой «винт–гайка» представлена на рис. Движение от двигателя 1 через редуктор z1…z7 на зубчатое колесо z8, совмещенное с гайкой. При вращении колеса z8 винт 3 перемещается в направляющих прямолинейного движения, преодолевая усилие F. Перемещение винта 3 ограничивается концевыми выключателями 4 и упорами 5. Для защиты механизма от перегрузок устанавливается предохранительная муфта 2.
|
|
|
Литература [1,2,3,4,5,6,7,11,12,13,22,23,25].
Тема проекта №6(9)
Механизм управления.
Техническое задание: разработать конструкцию механизма управления объектом по предложенной схеме в соответствии с заданным вариантом.
Основные исходные данные:
| № варианта |
I |
2 |
3 |
4 |
5 |
6 | ||
| Параметры | ||||||||
| Момент нагрузки на выходном валу Мн, Нмм | 200 | 150 | 100 | 400 | 300 | 200 | ||
| Скорость вращения выходного вала ω, рад/сек | 1,0 | 1,2 | 1,4 | 1,6 | 1,8 | 2,0 | ||
| Момент инерции нагрузки J н , кг∙м2 | 0,4 | 0,5 | 0,3 | 0,2 | 0,25 | 0,5 | ||
| Ускорение вращения выходного вала ε, рад/сек2 | 2,0 | 2,5 | 3,0 | 3,0 | 2,5 | 2,0 | ||
| Угол поворота выходного вала φ, град. | ±120 | ±150 | ±180 | ±210 | ±240 | ±270 | ||
| Цена деления шкалы точного
отсчета | 0,2 | 0,2 | 0,5 | 0,2 | 0,4 | 0,3 | ||
| Критерий проектирования |
Min погрешности |
Равнопрочность |
Min габаритов | |||||
| Тип электродвигателя | Постоянного тока (ДПМ, ДПР и др.)
| |||||||
| Тип датчика угла | По согласованию с преподавателем | |||||||
| Вид крепления к внешнему устройству | По указанию преподавателя | |||||||
| Вывод выходного элемента | По согласованию с преподавателем | |||||||
| Условия эксплуатации | УХЛ 4.1 | |||||||
| Степень защиты | IP22 | |||||||
Примечание: шкалы ШГО и ШТО должны вращаться в одну сторону; риски, указатели или окошки считывания показаний должны располагаться в одинаковых позициях относительно своей шкалы.
Дополнительные указания:механизм управления отрабатывает поворот вала исполнительного устройства от 0 до максимального значения и обратно; диаметр шкал грубого и точного отсчета принять одинаковым и равным 30…35 мм; при предварительном расчете принять КПД всего механизма η = 0.8; коэффициент динамичности ξ = 1.2…1.5.
|
|
|
Дата добавления: 2021-07-19; просмотров: 82; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!