ГЛАВА 2. ПРАКТИЧЕСКАЯ ЧАСТЬ НА ПРИМЕРЕ ЗАКОНОВ ОМА
Комитет образования, науки и молодёжной политики Волгоградской области
ГБПОУ «ВТК»
Кафедра: «Автомобильный транспорт и промышленное оборудование»
ДОПУЩЕН К ЗАЩИТЕ
Заведующий кафедрой
«Автомобильный транспорт и промышленное оборудование»
______________ К.В. Попов
ИНДИВИДУАЛЬНЫЙ ПРОЕКТ
на тему: «Система курсовой устойчивости на примере законов Ома»
ИП20.23.02.07.9566.ПЗ
Разработчик _________________ /А.В. Лизунов/
Группа ____А-1-1 ____
Специальность 23.02.07 – Техническое обслуживание и ремонт двигателей, систем и агрегатов автомобилей
Оценка работы _________________
Дата «___» ____________ 2020 г.
Руководитель _________________ /Е.В. Болдин/
Консультант _________________ /В.Н. Черницын/
Волгоград 2020
СОДЕРЖАНИЕ
| ВВЕДЕНИЕ | 3 |
| ГЛАВА 1. КУРСОВАЯ УСТОЙЧИВОСТЬ АВТОМОБИЛЯ | 4 |
| 1.1. Понятие курсовой устойчивости автомобиля | 4 |
| 1.2. Функции и структура курсовой устойчивости автомобиля | 6 |
| ГЛАВА 2. ПРАКТИЧЕСКАЯ ЧАСТЬ НА ПРИМЕРЕ ЗАКОНОВ ОМА | 13 |
| 2.1. Рассмотрение законов Ома | 13 |
| 2.2. Система курсовой устойчивости на примере законов Ома | 18 |
| Заключение | 23 |
| СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ | 24 |
ВВЕДЕНИЕ
Актуальность индивидуального проекта заключается в том, что сейчас автомобили комплектуются целым набором систем безопасности, которые относятся к категории активных. В их задачу входит повышение эффективности работы некоторых рабочих систем авто, а также корректировка поведения авто при разных условиях движения и устранение ошибок действий водителя. Одни из этих систем пока доступны только моделям премиум и среднего сегмента, но есть и такие, которые стали доступными уже и на бюджетных версиях. К ним относится, и система динамической (курсовой) стабилизации (самая распространенная аббревиатура – ESP). Исходя из этого, важность работы заключается в изучении системы безопасности, а именно – курсовой стабилизации.
Объектом исследования является машиностроение.
Предметом исследования является курсовая устойчивость как система безопасности в автомобиле.
Цель проекта: рассмотреть систему курсовой устойчивости на примере законов Ома.
Цель определила выбор следующих задач:
1. определить понятие курсовой устойчивости автомобиля;
2. изучить функции и структуру курсовой устойчивости автомобиля;
3. рассмотреть законов Ома;
4. определить систему курсовой устойчивости на примере законов Ома.
Методы исследования:
1. наблюдение,
2. анализ статистики,
3. изучение СМИ,
4. литература,
5. официальные сайты информационной сети интернет.
ГЛАВА 1. КУРСОВАЯ УСТОЙЧИВОСТЬ АВТОМОБИЛЯ
1.1. Понятие курсовой устойчивости автомобиля
Система ESP появилась на машинах не так уж и давно, но получила очень быстрое распространение, поскольку она пока считается одним из самых эффективных средств повышения безопасности.
Назначение:
Система курсовой стабилизации, как и многие другие, построена на базе ABS. Но при этом она относится к активным системам более высокого уровня. Если в целом посмотреть на ее работу, то скорее ESP можно назвать комплексом, поскольку для выполнения своей работы она задействует многие другие.

Рисунок 1 – Устройство системы ESP
Задача системы курсовой стабилизации – контроль за поперечной динамикой машины и устранение вероятности потери устойчивости и управляемости путем внесения определенных коррекций. Если по-простому рассмотреть ее функционирование, то система ESP предотвращает возможный срыв колес в занос при проезде поворотов на значительной скорости, обеспечивая передвижение авто по установленной водителем траектории.
Конструкция:
Поскольку система динамической стабилизации построена на базе ABS, то для своей работы она задействует ее составные элементы – блок управления, колесные датчики и гидромодуль.
Но помимо этого для получения необходимой информации ESP использует и другие датчики:
· положения руля (угла поворота);
· давления в тормозных магистралях;
· включения стоп-сигнала;
· поперечных и продольных ускорений (акселерометр, G-датчик).
Рисунок 2 – Схема системы ESP
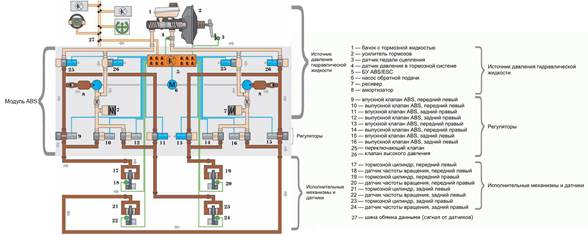
Вся получаемая информация дает системе представление о поведении машины и действий водителя. Если установленная водителем траектория не соответствует фактическому движению, то система динамической стабилизации срабатывает и вносит коррективы. В результате авто возвращается на заданную траекторию.
Для достижения своей цели ESP задействует системы:
· Антиблокировочную (ABS);
· Распределения усилий (EBD);
· Электроблокировки дифференциала (EDS);
· Противобуксовочную (ASR).
Помимо этого, ESP вносит коррективы в функционирование некоторых систем силовой установки, чтобы повлиять на крутящий момент. В некоторых моделях, оснащенных автоматической коробкой, она может повлиять и на ее работу.
Чтобы получить требуемый результат ESP может самостоятельно:
· Изменить положения заслонки дросселя;
· Сделать пропуск подачи топлива или искры на свечах зажигания;
· Изменить угол опережения зажигания;
· Отменить в АКПП переход на повышенную передачу.
На премиум-автомобилях ESP также может корректировать работу рулевого управления (изменить угол поворота колес без участия водителя) и активной подвески (поменять жесткость амортизаторов). Но это уже более совершенное средство безопасности, называющееся интегрированной системой управления динамикой.
1.2. Функции и структура курсовой устойчивости автомобиля
Все это направлено на то, чтобы автомобиль не смог изменить траекторию под действием внешних сил. Примечательно, что система динамической стабилизации действует на упреждение, то есть, еще на начальном этапе ухода автомобиля с траектории, ESP включается и устраняет возникшую ситуацию.
ESP срабатывает в двух случаях – при недостаточной и избыточной поворачиваемости. Если проще, то она включается, когда за счет действия сторонних сил сцепление с дорогой теряют передние колеса (авто не вписывается в поворот) или задние колеса (занос из-за резкого угла поворота).
Когда сносить начинает передок, блок управления по сигналам, поступающим от датчиков скорости вращения, угла поворота руля и акселерометра, улавливает это и задействует тормозной механизм заднего колеса, идущего по внутреннему радиусу. За счет притормаживания создается усилие, которое возвращает колеса передней оси на заданную траекторию. При этом ESP снижает крутящий момент двигателя, чтобы восстановить сцепление колес.

Рисунок 3 – Поворачиваемость автомобиля
В случае начала сноса колес задней оси, ESP задействует тормоз переднего колеса, двигающегося по внешней стороне. В результате этого действия задок авто выравнивается.
Существует еще одна ситуация, при которой ESP включается – пробуксовка всех четырех колес при попадании на скользкий участок дороги. В этом случае она попеременно задействует требуемые тормозные механизмы, чтобы удержать траекторию движения.

Рисунок 4 – Маневрирование автомобиля на скорости
Поскольку основное действие система осуществляет с помощью тормозных механизмов, то понятно, что делается это все гидромодулем ABS.
Достоинства и недостатки
ESP – система с высокой скоростью срабатывания. С момента определения, что движение авто перестало соответствовать заданному и до включения требуемого тормозного механизма проходит всего 20 миллисекунд.
При этом система динамической стабилизации действует полностью самостоятельно и достаточно плавно, поэтому водитель узнает о ее срабатывании только по загорающемуся индикатору. В остальное время, пока машина держит траекторию, система находится в режиме ожидания.
На многих автомобилях предусмотрено принудительное отключение этой системы при помощи клавиши на приборной панели. Но такая функция есть не во всех машинах. На одних функция отключения вообще не предусмотрена, а на других – ESP отключается временно, то есть, она снова активируется через определенный промежуток времени.
При этом стоит понимать, что она – вспомогательная, и в определенных ситуациях она не поможет. При попытке войти в крутой поворот на высокой скорости ESP не справиться и машину просто выкинет с дороги. Поэтому оценивать поведение авто в первую очередь нужно самому водителю, а система уже подкорректирует движение и устранит мелкие промахи и недочеты.
Основным недостатком этой системы является неправильная оценка действий водителя при определенных ситуациях. Так, в некоторых экстремальных случаях, чтобы «вытянуть» авто, необходимо добавить оборотов. ESP же сделать это не позволит.
Также она может помешать вытолкать авто из грязи или сугроба методом раскачки. Проблема не возникнет, если есть функция отключения ESP, которую можно задействовать в любой момент.
Дополнительные функции:
Более современные системы ESP обладают повышенной функциональностью, что повышает ее возможности. И делается это с помощью взаимодействия ESP с другими системами авто. Дополнительные функции ESP тоже называются системами, хотя, в целом, они такими не являются, поскольку полностью используют возможности и составные элементы ESP.
Так, функционал системы динамической устойчивости может дополнительно включать в себя такие системы:
· ROP (Предотвращения опрокидывания). В целом принцип срабатывания этой функции мало чем отличается от основной. При определении вероятности опрокидывания, которое характеризуется высоким поперечным ускорением, происходит торможение передка авто с одновременным понижением крутящего момента силовой установки.
· BG (предотвращение столкновения). Здесь ESP работает в паре с круиз-контролем (адаптивным). В случае вероятности столкновения автоматически включаются светозвуковые сигналы авто, при усугублении ситуации происходит торможение с обеспечением повышенного давления в тормозной системе благодаря включению насоса (аварийное торможение);
· Стабилизации автопоезда. Действует при буксировке прицепа. В ее задачу входит устранение «плаванья» по дороге прицепа путем притормаживания авто и понижение тягового усилия двигателя;
· FBS (повышения эффективности работы тормозной системы при нагреве колодок). При сильном нагреве сила трения между колодками и диском уменьшается, поэтому эффективность торможения снижается. Устраняется это путем увеличения силы прижима колодок за счет повышения давления в магистралях;
· Удаления влаги с тормозных механизмов. Здесь ESP работает в паре со стеклоочистителями. Во время дождя, когда очистители стекол включены, ESP кратковременно прижимает колодки к дискам. В результате трения и нагрева капли воды на дисках просто испаряются. Включается она только на скорости выше 50 км/ч.
Поскольку ESP построена на основе ABS и использует ее составные части, то и поломки у них идентичны. Самой распространенной проблемой у них является неисправность и повреждения датчиков скорости вращения колес. В остальном она достаточно надежна.
Система стабилизации курсовой устойчивости схематически работает так: при резком повороте руля, автомобиль, под действием сил инерции, стремится уйти в занос; система мгновенно вычисляет угол поворота руля, угол крена кузова, скорости вращения колес; информация с датчиков ESP поступает на исполняющие механизмы; в зависимости от ситуации, система принимает решение о распределении вращающего и тормозного моментов между колесами, тем самым увеличивая скорость вращения одних, и притормаживая другие; автомобиль принимает стабильный курс, и система переходит в режим наблюдения. 
Рисунок 5 – Электронная система курсовой устойчивости
Вполне естественно, что это предусматривает комплексную работу всех систем автомобиля, но решающую роль играет ESP. В работе системы участвуют датчики скоростей вращения колес, блок управления, датчик положения рулевого колеса, и датчик перегрузок. Он находится в самом центре автомобиля и отслеживает его положение по горизонтали и по вертикали.
Это просто понять на примере – водитель пытается изменить направление на высокой скорости, передние колеса перестают реагировать на поворот руля, и происходит снос автомобиля с траектории.
ESP притормаживает заднее, внутренне к повороту, колесо, а переднее, внешнее к радиусу поворота, начинает крутиться быстрее, тем самым предотвращая снос.
Система стабилизации курсовой устойчивости может многое, но имеет свой предел возможностей, поэтому полагаться только на электронику не стоит.
Современное транспортное средство – это сложная система, которая определяется большим числом противоречивых требований. Именно поэтому, автомобилестроение не может позволить себе искать технические решения, основываясь на интуитивном уровне. При проектировании нового транспортного средства необходимо учитывать уже существующие технические характеристики и стараться модернизировать их, делать лучше. Во время проектирования эксплуатационных параметров движения необходимо учитывать такие математические модели, которые будут отражать основные свойства автомашины, а также позволят своевременно спрогнозировать реакцию и поведение транспортного средства на воздействие окружающей внешней среды, а также воздействие со стороны того, кто управляет машиной.
Для правильной корректировки конструкции транспортного средства на всех этапах проектирования необходимы глубокие теоретические исследования. Достаточно внимания при проектировании автомобиля уделяется и системе автоматического управления динамическими свойствами транспортного средства. К такой системе относятся: управление процессом начала движения (противобуксовочная система Anti-SlipRegulation (ASR)), торможение (антиблокировочная система AntilockingBrakeSystem (ABS)), устойчивость и управляемость автомашины в повороте (электронная программа устойчивости ElectronicStabilityProgramm (ESP)), а также система активного рулевого управления (ActiveFrontSteering (AFS)).
Однако при проектировании транспортного средства, учитывается не только теоретическая оценка курсовой устойчивости автомобиля, но еще и экспериментальные испытания, которые являются своеобразной финишной оценкой, дающей окончательное заключение о динамическом качестве автомобиля. На сегодняшний день существуют методы оценки автомобиля, которые связаны с дорожными испытаниями и анализом субъективных оценок, которые дает водитель-испытатель.
ГЛАВА 2. ПРАКТИЧЕСКАЯ ЧАСТЬ НА ПРИМЕРЕ ЗАКОНОВ ОМА
2.1. Рассмотрение законов Ома
Впервые данный закон был официально зафиксирован и сформулирован в восемнадцатом веке, благодаря сделанному сейчас уже широко известным всем Георгом Симоном Омом открытию. Благодаря данному закону получило грамотное и исчерпывающее объяснение наличие количественной связи между тремя фигурирующими в определении параметрами.
Зависимость рассматривается как пропорциональная. Когда данное явление только было выявлено, закон несколько раз формулировали. В итоге сейчас всем известно данное определение: «величина тока на участке цепи прямо пропорциональна напряжению, приложенному к этому участку, и обратно пропорциональна его сопротивлению».
Закон Ома для участка цепи - это базовое знание, которое мы с вами получаем еще в школе. Но зачастую получается так, что мы с вами либо забыли, либо пропустили или банально не понимаем этот закон. В этой статье я постараюсь вам объяснить Закон Ома для участка цепи простым образом, проведя аналогию с водопроводом.

Проводим аналогию.
Итак, для того чтобы понять закон Ома давайте проведем аналогию с гидравликой и представим, что:
Напряжение U равно уровню воды в самой обычной водонапорной башне;
Сопротивление R = это отходящая водяная труба;
Сила тока I = некий объем воды протекающий через трубу за определенное время.
Сила тока:
Итак, давайте теперь разберемся, что такое сила тока. Для этого представьте колбу, у которой на одной стороне есть три отверстия одного размера, расположенные по вертикали. Если этот сосуд наполнить водой, то из боковых отверстий начнет вытекать вода.
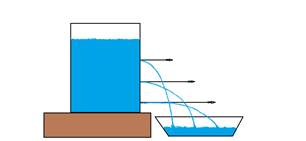
Рисунок 5 – Наполнение сосуда водой
Причем, как видно из рисунка, с самого нижнего отверстия струя воды будет бить дальше всех, а с самого верхнего струя будет самая слабая. Так как наши отверстия идентичные, то сопротивление водному потоку оказывается одинаковое.
За одно и то же время из нижнего отверстия вытечет воды больше, чем с верхнего (так как столб воды «U» оказывает разное давление на отверстия), а объем воды (из вышеописанной аналогии), вытекающий из отверстия за определенное время, есть не что иное, как сила тока «I».
Посмотрите еще раз внимательно на рисунок, не заметили тут определенную закономерность? А она такова: при одинаковом сопротивлении и при возрастании напряжения возрастает и сила тока.
Сопротивление.
Итак, давайте теперь разберемся со следующей величиной, а именно силой тока.

Рисунок 6 – Водонапорная башня
Наверняка, да, что такой прибор был вами замечен, так вот это –водонапорная башня. Ее основное назначение в создании давления в водонапорных трубах. Итак, вы пришли домой и решили помыть руки. Открыв кран на полную, поток воды будет существенным и наврятли вас устроит, и вы с помощью краника отрегулируете поток так, чтобы он был для вас комфортен.

Рисунок 7 – Регулирование напора воды
А теперь подумайте, что только что было сделано? А вот что: изменив сопротивление потоку, вы отрегулировали его.
Теперь переносим эту аналогию на электричество. Напряжение остается у нас на постоянном уровне, так как мы не можем никоим образом оказать влияние на нашу с вами водонапорную башню, в которой постоянно поддерживается один и тот же уровень воды благодаря системе насосов.
Открыв кран на максимум, мы с вами пустили поток воды на полную, а закрутив его до нужного нам уровня мы изменили сопротивление потоку. И это привело к тому, что ток воды стал слабым. Получается, что мы путем изменения сопротивления отрегулировали количество протекающей воды за определенный отрезок времени.
Теперь вспоминаем, что такое сила тока. Сила тока – определенное количество электронов, проходящих через поперечное сечение проводника за определенное время.
Итак, получается, что, изменяя сопротивление (при неизменном напряжении), мы с вами можем изменять силу тока.
Напряжение
Давайте рассмотрим простейшую систему водоснабжения, где у вас уже есть возможность управлять водонапорной башней:
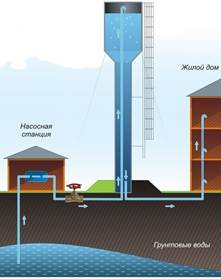
Рисунок 8 – Управление водонапорной башней
Теперь создаем ситуацию: вам нужно заполнить емкость водой за 1 час, причем время строго регламентировано и в большую или меньшую сторону отклоняться нельзя. И тут на ваш шланг (через который заполняется емкость) наступает человек, и вы никак не можете его заставить сойти с него.
По факту человек передавивший шланг стал сопротивлением и в результате этого изменился поток воды. Так как вы не можете убрать это сопротивление нужно действовать по-другому, только вопрос как?
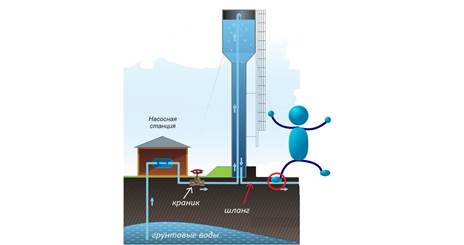
Рисунок 9 – Управление водонапорной башней
А все просто. Достаточно нам увеличить количество воды в водонапорной башне, это увеличит давление воды в трубах и через наш с вами передавленный шланг потечет больший поток воды.
Если, открыв на полную кран, наполняющий башню, вы поняли, что наполните емкость быстрее чем за час, то достаточно прикрыть кран. Это снизит уровень воды в башне, что соответственно уменьшит поток через пережатый шланг.
Возвращаемся к электричеству. Итак, человек, передавивший шланг, увеличил сопротивление и по этой причине сила тока у нас уменьшилась. Для ее восстановления мы с вами увеличили напряжение (уровень воды в водонапорной башне).
Закон Ома для участка цепи:
Итак, из всего вышеописанного вы заметили определенные закономерности? Так вот, Г. Ом, проводя ряд простейших опытов, выявил эти закономерности между тремя величинами: сила тока, сопротивление и напряжение и вывел следующий закон:
Рисунок 10 – Законы Ома
2.2. Давление на примере турбированного ДВС
Цель любого управления – изменить состояние объекта нужным образом (в соответствии с заданием). Теория автоматического регулирования должна ответить на вопрос: «как построить регулятор, который может управлять данным объектом так, чтобы достичь цели?» Для этого разработчику необходимо знать, как система управления будет реагировать на разные воздействия, то есть нужна модель системы: объекта, привода, датчиков, каналов связи, возмущений, шумов.
Модель – это объект, который мы используем для изучения другого объекта (оригинала). Модель и оригинал должны быть в чем-то похожи, чтобы выводы, сделанные при изучении модели, можно было бы (с некоторой вероятностью) перенести на оригинал. Нас будут интересовать в первую очередь математические модели, выраженные в виде формул. Кроме того, в науке используются также описательные (словесные), графические, табличные и другие модели.
Любой объект взаимодействует с внешней средой с помощью входов и выходов.
Входы – это возможные воздействия на объект, выходы – это те сигналы, которые можно измерить. Например, для электродвигателя входами могут быть напряжение питания и нагрузка, а выходами – частота вращения вала, температура. Входы независимы, они «приходят» из внешней среды. При изменении информации на входе меняется внутреннее состояние объекта (так называют его изменяющиеся свойства) и, как следствие, выходы:
Это значит, что существует некоторое правило, по которому элемент преобразует вход x в выход y. Это правило называется оператором. Запись y = U[x] означает, что выход y получен в результате применения оператора U ко входу x.
Построить модель – это значит найти оператор, связывающий входы и выходы. С его помощью можно предсказать реакцию объекта на любой входной сигнал.
Рассмотрим электродвигатель постоянного тока. Вход этого объекта – это напряжение питания (в вольтах), выход – частота вращения (в оборотах в секунду). Будем считать, что при напряжении 1 В частота вращения равна 1 об/сек, а при напряжении 2 В – 2 об/сек, то есть частота вращения равна по величине напряжению1. Легко видеть, что действие такого оператора можно записать в виде:

Теперь предположим, что этот же двигатель вращает колесо и в качестве выхода объекта мы выбрали число оборотов колеса относительно начального положения (в момент t = 0). В этом случае при равномерном вращении произведение x ⋅∆t дает нам количество оборотов за время ∆t, то есть y(( t) = x ⋅∆t здесь запись ) y(t явно обозначает зависимость выхода от времени t ). Можно ли считать, что этой формулой мы определили оператор U ? Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного сигнала. Если напряжение на входе) x(t меняется (все равно как), угол поворота запишется в виде интеграла
Оператор, который действует по такому правилу, называется оператором интегрирования. С помощью этого оператора можно, например, описать наполнение пустого бака водой. Если сечение бака S (в м 2) постоянно по всей его высоте, то уровень воды h определяется как интеграл от потока воды q (в м 3 /с), деленный на S:
Обратный оператор – оператор дифференцирования – вычисляет производную:
Как мы увидим, этот оператор играет очень важную роль в описании объектов управления. Обычно оператор дифференцирования обозначается буквой p. Запись ) y(t) = p x(t внешне выглядит как «умножение» оператора p на сигнал ) x(t , но на самом деле обозначает действие этого оператора, то есть дифференцирование:
Где встречаются такие операторы? Приведем примеры из электротехники. Например, известно, что ток i (в амперах), проходящий по цепи с конденсатором, пропорционален производной от разности потенциалов u (в вольтах) на его пластинах:

Здесь C – емкость конденсатора (измеряется в фарадах). Кроме того, падение напряжения u на катушке индуктивности пропорционально производной от проходящего тока i :

где L – индуктивность (измеряется в генри).
Оператор дифференцирования – это идеальный (физически нереализуемый) оператор, его невозможно реализовать на практике. Чтобы понять это вспомним, что при мгновенном изменении сигнала его производная (скорость возрастания) будет равна бесконечности, а никакое реальное устройство не может работать с бесконечными сигналами.
Как строятся модели?
Во-первых, математические модели могут быть получены теоретически из законов физики (законы сохранения массы, энергии, импульса). Эти модели описывают внутренние связи в объекте и, как правило, наиболее точны.
Рассмотрим RLC-цепочку, то есть последовательное соединение резистора с сопротивлением R (в омах), катушки индуктивности с индуктивностью L и конденсатора с емкостью C. Она может быть описана с помощью двух уравнений:

Первое уравнение означает, что разность потенциалов на концах RLC-цепочки равна сумме разностей потенциалов на всех промежуточных участках. Разность потенциалов R⋅i(t) на резисторе вычисляется по закону Ома, а на катушке – по формуле, приведенной в предыдущем параграфе. Второе уравнение описывает связь между напряжением и током для конденсатора. Вход этого объекта – напряжение u(t) на концах цепочки, а выход – разность потенциалов u (t) c на пластинах конденсатора.
Второй способ – построение модели в результате наблюдения за объектом при различных входных сигналах (этим занимается теория идентификации). Объект рассматривается как «черный ящик», то есть, его внутреннее устройство неизвестно. Мы смотрим, как он реагирует на входные сигналы, и стараемся подстроить модель так, чтобы выходы модели и объекта совпадали как можно точнее при разнообразных входах.
На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход и выход) определяется из теории, а коэффициенты находят опытным путем. Например, общий вид уравнений движения корабля хорошо известен, однако в этих уравнениях есть коэффициенты, которые зависят от многих факторов (формы корпуса, шероховатости поверхности и т.п.), так что их крайне сложно (или невозможно) найти теоретически.
В этом случае для определения неизвестных коэффициентов строят масштабные модели и испытывают их в бассейнах по специальным методикам. В авиастроении для тех же целей используют аэродинамические трубы.
Для любого объекта управления можно построить множество различных моделей, которые будут учитывать (или не учитывать) те или иные факторы. Обычно на первом этапе стараются описать объект как можно более подробно, составить детальную модель. Однако при этом будет трудно теоретически рассчитать закон управления, который отвечает заданным требованиям к системе. Даже если мы сможем его рассчитать, он может оказаться слишком сложным для реализации или очень дорогим.
С другой стороны, можно упростить модель объекта, отбросив некоторые «детали», которые кажутся разработчику маловажными.
Таким образом, нам удалось выяснить, что закон Ома непосредственно влияет на систему курсовой устойчивости.
ЗАКЛЮЧЕНИЕ
Устойчивость системы является необходимым, но недостаточным условием ее работоспособности. Устойчивая система может оказаться недостаточно точной при отработке различных воздействий; недостаточно быстродействующей при выходе на заданную величину, и т.п. При исследовании систем приходится решать задачи обеспечения требуемых показателей качества переходного 12 процесса:
- быстродействия,
- колебательности,
- перерегулирования,
- характеризующих точность и плавность протекания процесса.
Качество работы системы в конечном счете определяется величиной ошибки, равной разности между требуемым и действительными значениями регулируемой величины.
Для определения качества динамической системы используются критерии качества, которые можно разбить на 4-е группы, но предлагаю рассмотреть главные – 2. К первой группе относятся критерии, использующие величину ошибки в различных типовых режимах. Эту группу называют критериями точности динамических систем регулирования.
К второй группе относятся критерии, определяющие величину запаса устойчивости, то есть критерии, устанавливающие, насколько далеко от границы устойчивости находится система регулирования.
Наиболее опасной для динамической системы является колебательная граница устойчивости. Это определяется тем, что стремление повысить общий коэффициент усиления в системе, как правило, приводит к приближению системы именно к колебательной границе устойчивости и затем – к возникновению незатухающих автоколебаний.
Дата добавления: 2021-07-19; просмотров: 116; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!