Согласно определению произведения операторов,
РОССИЙСКОЙ ФЕДЕРАЦИИ
Московский государственный институт электроники и математики
(технический университет)
Кафедра алгебры
И математической логики
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
Методические указания
К домашней контрольной работе
По курсу «Линейная алгебра и аналитическая геометрия»
Часть 1
Москва
2005
Составители: канд. физ.-мат. наук И.К. Бусяцкая;
канд. физ.-мат. наук К.К. Андреев
УДК 512.8
Линейные операторы: Метод. указания к домашней контрольной работе по курсу «Линейная алгебра и аналитическая геометрия». Часть 1 / Моск. гос. ин-т электроники и математики; Сост.: И.К. Бусяцкая, К.К. Андреев. М., 2005. – 23 с.
Табл. 1, рис. 3.
На конкретных примерах излагаются способы решения задач домашней контрольной работы по теме «Линейные операторы». Приводится ряд дополнительных сведений из теории линейных операторов, некоторые из которых доказываются, а некоторые предоставляются для доказательства студентам.
Для студентов групп М-21 – 24, ЭМ-21 первого курса ФПМ и групп МЭ-21, 22 первого курса ФЭМ.
ISBN
Условия задач
Общие условия ко всем вариантам
Даны линейные операторы j и y в пространстве V 3.
1. Найти матрицы операторов j, y и j×y в базисе i, j, k.
2. Найти ядро и образ операторов j и y. В случае ненулевого ядра описать их уравнениями.
|
|
|
3. Выяснить, существует ли обратный оператор для j×y. Если да, то описать его геометрический смысл; если нет, то указать причину.
Условия вариантов
| Номер варианта | j | y | Номер варианта | j | y | Номер варианта | j | y |
| 1 2 3 4 5 6 7 8 9 10 | 1а 2а 3а 4а 5а 6а 6е 1б 2б 3б | 2б 1б 4а 6д 3а 2а 5а 4б 6б 6в | 11 12 13 14 15 16 17 18 19 20 | 4б 5б 6б 1е 1в 2в 3в 4в 5в 6в | 1г 2в 3в 2б 5б 6г 5а 2б 6д 1д | 21 22 23 24 25 26 27 28 29 30 | 1е 1г 4в 1г 2б 3б 4б 2а 6г 4б | 2а 5б 3б 4в 3б 6е 4в 5б 6д 1е |
1. Поворот вокруг оси а) OZ на 90°; б) OZ на 45°; в) OX на 45°; г) OX на 30°; д) OY на 90°; е) OY на 60°.
2. Ортогональное проектирование на плоскость а) x + y + z = 0; б) x – y + z = 0; в) x + y – z = 0.
3. Ортогональное проектирование на ось а) x = 0, y = z; б) x = z, y = 0; в) x = y = z.
4. Зеркальное отражение относительно плоскости а) x + y + z = 0; б) x – y + z = 0; в) x + y – z = 0.
5. Зеркальное отражение относительно оси а) x = y, z = 0; б) x = z, y = 0; в) x = y = z.
6. Векторное умножение на вектор а) a = i + j + k; б) a = i + j – k; в) a = i – j + k; г) a = i + 2k; д) a = j – 2k; е) a = 2i – j.
§1. Определения и примеры
Пусть V – линейное пространство, т.е. множество, элементы которого мы назовем векторами, с двумя операциями: сложением векторов и умножением вектора на число из поля Р (Р = R или P = C). Эти операции обладают определенными «естественными» свойствами. Пусть также j – отображение V в V, т.е. правило, описывающее, как по вектору x Î V находить вектор y Î V. При этом вектор у называется образом вектора х и обозначается у = j (x).
|
|
|
Отображение j: V ® V называется линейным оператором, если оно обладает следующими свойствами.
1. j(x + y) = j(x) + j(y), т.е. образ суммы двух векторов совпадает с суммой образов этих векторов.
2. j(lx) = lj(x) – образ вектора, умноженного на число, совпадает с произведением образа этого вектора на то же число.
Отсюда вытекает, что если j – линейный оператор в V, то
j(a1x + a2y) = a1j(x) + a2j(y),
т.е. образ линейной комбинации векторов равен линейной комбинации образов этих векторов с теми же коэффициентами.
Примеры.
1. Рассмотрим произвольное линейное пространство V и в нем два оператора.
j1(x) = 0 " x Î V. j1 называется нулевым оператором.
j2(x) = x " x Î V. j2 называется тождественным оператором и обозначается id.
Линейность этих операторов проверяется без труда. (Проверьте!)
2. Рассмотрим линейное пространство V = R2, т.е. множество всех векторов плоскости, и отображение j – поворот плоскости на угол  . Это отображение является линейным оператором (см. рис. 1). Проверяем свойства:
. Это отображение является линейным оператором (см. рис. 1). Проверяем свойства:
|
|
|
j (x 1 + x 2) = j (x 1) + j (x 2),
j (lx 1) = lj(x 1).
Можно рассмотреть оператор поворота на произвольный угол a. Этот линейный оператор обозначается ja. Заметим, что при a = 2kp ja = id.
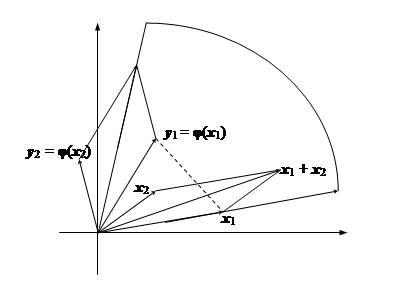
у1 + у2 = φ(x1 + x2)
Рис. 1
3. Пусть V = R3 – множество всех векторов трехмерного пространства. Отображение j – ортогональное проектирование на плоскость OXY.
Для проверки линейности этого оператора воспользуемся известными свойствами проектирования.
j(a + b) = прOXY (a + b) = прOXY a + прOXY b = j(a) + j(b);
j(la) = прOXY (la) = lпрOXY a = lj(a).
j – оператор проектирования на плоскость – линейный оператор (проектор).
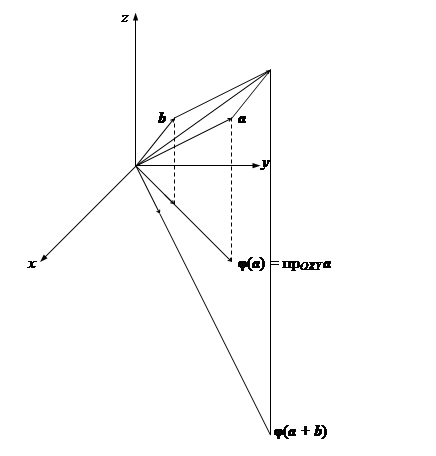 |
Рис. 2
4. Не все отображения являются линейными. В том же векторном пространстве V = R3 рассмотрим единичную сферу, задаваемую в декартовой системе координат уравнением x2 + y2 + z2 = 1, и отображение j, переводящее вектор a в вектор j(a), сонаправленный вектору a и имеющий единичную длину.
|
|
|
 |
Рис. 3
Отображение j не является линейным оператором, т.к. j(la) = j(a) ¹ ¹ lj(a) при l ¹ 1.
5. Рассмотрим V = Pn [x] , т.е. линейное пространство всех многочленов степени не выше n:
Pn [x] = {p(x) = anxn +…+ a1x + a0, aiÎ P},
и j – отображение дифференцирования:
j(anxn +…+ a1x + a0) = nanxn–1 +…+ a1.
Мы знаем свойства производной:
(p(x) + q(x))¢ = p¢(x) + q¢(x) и (lp(x))¢ = lp¢(x);
следовательно, отображение дифференцирования является линейным оператором, который обозначается j = d.
6. Пусть V = Mn – линейное пространство квадратных матриц порядка n, A – фиксированная матрица, j – отображение Mn ® Mn , действующее следующим образом: для произвольной матрицы B Î Mn образ j(B) = A × B.
Проверим линейность этого отображения, используя известные свойства умножения матриц:
j(B + C) = A(B + C) = AB + AC = j(B) + j(C);
j(lB) = A(lB) =lAB = lj(B).
Если n = 2, а матрица A =  , то для любой матрицы B =
, то для любой матрицы B = 
j(B) = =  .
.
 |
7. Рассмотрим линейное пространство V = Rn =
= 
 и A Î Мn – фиксированную квадратную матрицу порядка n; x =
и A Î Мn – фиксированную квадратную матрицу порядка n; x =  ,
,
y =  – векторы пространства Rn.
– векторы пространства Rn.
С помощью матрицы А =  зададим отображение jA: Rn ® Rn следующим образом:
зададим отображение jA: Rn ® Rn следующим образом:
® = , т.е. y = jA (x) = Аx.
jА – линейный оператор, т.к.
jА (x1 + x2) = А(x1 + x2) = Ax1 + Ax2 =jА (x1) + jА (x2);
jА (lx) = A×(lx) = l(Ax)= ljА (x).
Этот пример, как мы увидим в следующем параграфе, является универсальным.
§2. Матрица линейного оператора в данном базисе
Пусть e1, …,en – некоторый базис линейного пространства V, т.е. линейно независимая система векторов, через которую линейно выражается любой вектор пространства V; j – линейный оператор. Образы базисных векторов j(е1), …, j(еn), как и все векторы пространства V, линейно выражаются через базисные векторы e1, …,en:
j(е1) =  e1 + … +
e1 + … +  en;
en;
j(е2) =  e1 + … +
e1 + … +  en;
en;
…
j(еn) =  e1 + … +
e1 + … +  en.
en.
Матрица A = называется матрицей линейного оператора в данном базисе. В столбцах этой матрицы стоят координаты образов базисных векторов в рассматриваемом базисе.
Примеры.
1. Пусть V = R3, e1=  , e2=
, e2=  , e3 =
, e3 =  – стандартный базис.
– стандартный базис.
Рассмотрим нулевой и тождественный операторы. В первом случае j(x) = 0 " x и, следовательно,
j(e1) = 0e1 + 0e2 + 0e3;
j(e2) = 0e1 + 0e2 + 0e3;
j(e3) = 0e1 + 0e2 + 0e3;
A =  – матрица нулевого оператора.
– матрица нулевого оператора.
Если j = id, то id (x) = x " x и, следовательно,
id(e1) = e1=1e1 + 0e2 + 0e3;
id(e2) = e2=0e1 + 1e2 + 0e3;
id(e3) = e3 =0e1 + 0e2 + 1e3.
Следовательно, матрицей оператора id будет матрица
A =  = E.
= E.
Заметим, что матрицами нулевого и тождественного оператора в любом базисе будут нулевая и единичная матрицы соответственно.
2. V = R2, i =  и j =
и j =  – стандартный базис пространства R2. Оператор j – поворот на угол :
– стандартный базис пространства R2. Оператор j – поворот на угол :
j(i) = (cos ) i + (sin ) j;
j(j) = (–sin ) i + (cos ) j.
Следовательно, матрицей поворота на угол будет матрица
A =  =
=  .
.
Аналогичным образом можно получить матрицу поворота на любой угол a:
A =  .
.
3. V = R3, j – оператор проектирования на плоскость OXY. Найдем матрицу этого оператора в стандартном базисе e1= i = , e2= j = , e3 = = k = . Так как j(i)= i = , j(j)= j = , j (k) = 0=  , то A = =
, то A = =  .
.
В столбцах матрицы А стоят образы базисных векторов i, j, k в координатной форме.
4. V = P3 [x] – линейное пространство многочленов степени не выше 3, j = d – оператор дифференцирования; 1, x, x2, x3 – стандартный базис пространства V.
Напомним, что любой многочлен а3х3 + а2х2 + а1х + а0 в рассматриваемом базисе может быть записан в координатной форме как четырехмерный вектор  ; d(1) = 0 =
; d(1) = 0 =  , d(x) = 1 =
, d(x) = 1 =  , d(x2) = 2x =
, d(x2) = 2x =  , d(x3) = = 3x2 =
, d(x3) = = 3x2 =  .
.
Следовательно, матрица оператора d имеет вид:
A =  .
.
5. V = R3, jА – оператор умножения на матрицу А. Пусть, например, A =  .
.
Рассмотрим i = , j = , k = – стандартный базис пространства R3; вектор x = x1i + x2j + x3k =  .
.
Действие оператора jА описывается следующим образом:
j(x) = A =  =
=  .
.
Отсюда получаем: j (i)= , j (j)=  , j (k) =
, j (k) =  . Матрица оператора jА совпадает с исходной матрицей A = .
. Матрица оператора jА совпадает с исходной матрицей A = .
Этот пример показывает, что любая матрица является матрицей некоторого оператора, а именно, оператора умножения на эту матрицу.
Каждый линейный оператор j однозначно определяется своей матрицей. Действительно, пусть
A = 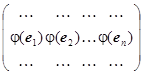 = –
= –
матрица оператора j в некотором базисе e1, …,en. Столбцы матрицы представляют собой координатную запись образов базисных векторов. Если известны векторы j(e1), …,j(en), то известно, куда отображается любой вектор x. Действительно, пусть
x = x1e1 + …+ xnen – разложение вектора x по базису e1, …,en;
j(x) = j(x1e1 + …+ xnen) = x1j(e1) + … + xnj(en) =
= x1  + x2
+ x2  + … + xn
+ … + xn  = A .
= A .
То есть каждый оператор является оператором умножения на свою матрицу А.
Так, рассмотренный нами в примере 4 оператор дифференцирования d имеет в стандартном базисе матрицу
A = .
Если многочлен р(х) Î Р3[x] имеет вид p(x) = ax3 +bx2 +cx +d, то координатная запись этого многочлена в базисе 1, x, x2, x3 такова:
p(x) =  ;
;
d(p(x)) = p¢(x) = 3ax2 + 2bx + c. Координатная запись многочлена p¢(x) = =  . Этот вектор получается из вектора , как и утверждает теория, умножением на матрицу А:
. Этот вектор получается из вектора , как и утверждает теория, умножением на матрицу А:
= .
§3. Ядро и образ линейного оператора
С каждым оператором j связаны два важных множества векторов из V. Первое, называемое ядром оператора (обозначается Ker j), состоит из множества всех векторов, отображаемых в нулевой вектор 0:
Ker j = {x: j(x) = 0}.
Второе, называемое образом оператора (обозначается Im j), состоит из множества всех образов векторов пространства V:
Im j = {y: y = j(x)}.
Для любого линейного оператора j ядро Ker j ¹ Æ, т.к. обязательно содержит нулевой вектор: 0 Î Ker j. Действительно, возьмем произвольный вектор a Î V и запишем:
0 = 0×a; j(0) = j(0×a) = 0×j(a) = 0. Из равенства j(0) = 0 следует, что и образ линейного оператора j (Im j) также непуст: 0 Î Im j.
Проверим, что ядро и образ являются линейными подпространствами V, т.е. подмножествами, замкнутыми относительно линейных операций в пространстве V.
Пусть x, y Î Ker j, т.е j(x) = j(y) = 0; ax + by – линейная комбинация рассматриваемых векторов.
j(ax + by) = aj(x) + bj(y) = 0, т.е. ax + by Î Ker j.
Если же x, y Î Im j, то x = j(a), y = j(b), т.е. x и y – образы каких-то векторов a и b. Рассмотрим вектор aa + bb – линейную комбинацию векторов a и b – и найдем его образ:
j(aa + bb) = aj(a) + bj(b) = ax + by.
Вектор ax + by является образом вектора aa + bb и, следовательно, принадлежит образу оператора Im j.
Примеры.
1. j – нулевой оператор в R3.
Ker j = R3, Im j ={0}.
2. j = id.
Ker j = {0}, Im j = R3.
3. Поворот на некоторый угол в R2.
Ker j = {0}, Im j = R2.
4. j – проекция в R3 на плоскость OXY.
Ker j = {lk} – ось OZ, Im j = <i, j> – линейная оболочка векторов i и j, т.е. плоскость OXY.
5. j – дифференцирование в P3 [x].
Ker j = {const.} = <1>, Im j = <1, x, x2> = P2 [x], т.е. множество многочленов степени не выше 2.
Найдем Ker j и Im j для произвольного оператора j, который в фиксированном базисе есть оператор умножения на матрицу А.
Ker j – это такие векторы x = , для которых
A =  =
=  .
.
Следовательно, ядро оператора совпадает с V(Â) – множеством всех решений однородной системы

Для определения размерности ядра мы можем воспользоваться формулой: dim Ker j = dim V(Â) = n – r, где n – размерность пространства V, а r – ранг матрицы А.
Если V(Â) = {0}, то Ker j = {0} и любой ненулевой вектор x переходит под действием оператора j в ненулевой вектор. В этом случае, если x1 ¹ x2, то j(x1) ¹ j(x2). Действительно, рассмотрим вектор x = x1 – x2 ¹ 0. Из сказанного выше следует, что j(x) ¹ 0, но j(x) = j(x1 – x2) = j(x1) – – j(x2), т.е. j(x1) ¹ j(x2).
Такие отображения j, для которых образы различных векторов различны, называются инъективными.
Если ядро оператора Ker j состоит не только из 0, то отображение j не является инъективным. Действительно, пусть x ¹ 0 и пусть x Î Ker j, тогда j(x) = j(0) = 0. Образ x и образ 0 совпадают.
Рассмотрим произвольный вектор x Î V и разложим его по базису e1, …,en: x =  . Применим к вектору x линейный оператор j:
. Применим к вектору x линейный оператор j:
j(x) = j( ) =  j(ei).
j(ei).
Так как любой вектор из Im j имеет вид j(x), то любой вектор y Î Î Im j является линейной комбинацией векторов j(e1), …,j(en).
Рассмотрим L = <j(e1), …,j(en)>– линейную оболочку образов базисных векторов, т.е. множество всевозможных линейных комбинаций вида l1j(e1) + … + lnj(en). Очевидно, что Im j Ì L. Однако верно и обратное включение, т.е. L Ì Im j.
Для доказательства этого рассмотрим произвольную линейную комбинацию векторов j(e1), …,j(en): l1j(e1) + …+ lnj(en) = y и покажем, что существует вектор x Î V, для которого j (x) = y.
Это вектор x =  . Действительно, в силу линейности оператора j
. Действительно, в силу линейности оператора j
j(x) = j( ) =  j(ei) = y.
j(ei) = y.
Следовательно, L = Im j и dim Im j = dim <j(e1), …,j(en)>. Но размерность линейной оболочки векторов совпадает с максимальным числом линейно независимых векторов в системе векторов j(e1), …,j(en). Это число совпадает с rang A = r, т.к. столбцы матрицы А – это векторыj(e1), …,j(en).
Итак: если r = n = dimV, то Im j = V и отображение j сюръективно. С другой стороны, в этом случае Ker j ={0} и, как мы отметили выше, отображение j инъективно. Таким образом, j является биективным, т.е. взаимно однозначным отображением пространства V на себя.
Биективное линейное отображение называется изоморфизмом.
§4. Действия над линейными операторами
Пусть j1 и j2 – линейные операторы в векторном пространстве V. Суммой этих линейных операторов называется оператор j, действующий следующим образом:
x ® j(x) = j1(x) + j2(x).
Оператор j обозначается j1 + j2.
Проверим, что j – линейный оператор, т.е. j(ax + by) = aj(x) + + bj(y). Согласно нашему определению,
j(ax + by) = j1(ax + by) + j2(ax + by) = aj1(x) + bj1(y) + aj2(x) + + bj2(y) = a(j1(x) + j2(x)) + b(j1(y) + j2(y)) = aj(x) + bj(y).
Мы воспользовались линейностью операторов j1 и j2.
В фиксированном базисе e1, …,en каждый оператор описывается своей матрицей. Пусть А – матрица оператора j1, В – оператора j2 и С – оператора j = j1 + j2.
Столбцы этих матриц – образы базисных векторов e1, …,en в координатной записи:
A =  ; B =
; B =  ; C =
; C =  .
.
Следовательно, С = А + В, т.е.  Мы видим, что при сложении операторов их матрицы складываются.
Мы видим, что при сложении операторов их матрицы складываются.
Пусть j – произвольный линейный оператор, l – число из рассматриваемого поля Р. Произведением оператора j на число l называется оператор y, обозначаемый lj и действующий следующим образом: y(x) = = lj(x). Несложно проверить, что если j – линейный оператор, то y – также линейный оператор. (Проверьте!)
Если А – матрица оператора j в базисе e1, …,en, то В – матрица оператора y в этом же базисе – имеет вид:
B =  = lA.
= lA.
Таким образом, при умножении оператора на число его матрица умножается на это число.
Произведением операторов j1 и j2 называется оператор j, действующий следующим образом:
j(x) = j2(j1(x)).
Оператор j обозначается j1 × j2 и является композицией отображений j1 и j2.
Проверим линейность оператора j:
j(ax + by) = j2(j1(ax + by)) = (линейность j1) = j2(aj1(x) + bj1(y)) = (линейность j2) = aj2(j1(x)) + bj2(j1(y)) = aj(x) + bj(y).
Пусть А – матрица оператора j1, В – матрица оператора j2, а С – матрица оператора j1j2 в фиксированном базисе e1, …,en. Выясним, как связаны между собой эти матрицы. Воспользуемся матричной записью действия оператора.
Пусть x = ; тогда j1(x) = A , j2(x) = B , j(x) = C .
Согласно определению произведения операторов,
j(x) = j2(j1(x)) = B×  , где = j1(x) = A× , т.е. j(x) = = B × A× . С другой стороны, j(x) = C× . Итак, мы имеем равенство C× = B × A× , справедливое для любого вектора x = . То есть, с одной стороны, j – оператор умножения на матрицу С, а с другой стороны, j – оператор умножения на В × А.
, где = j1(x) = A× , т.е. j(x) = = B × A× . С другой стороны, j(x) = C× . Итак, мы имеем равенство C× = B × A× , справедливое для любого вектора x = . То есть, с одной стороны, j – оператор умножения на матрицу С, а с другой стороны, j – оператор умножения на В × А.
Мы знаем, что матрица линейного оператора определена однозначно, т.к. ее столбцами являются столбцы j(e1), …,j(en). Следовательно, С = В × А. Таким образом, матрица оператора j = j1 × j2 произведения линейных операторов j1 и j2 является произведением матриц этих операторов, взятых в обратном порядке.
Оператор y называется обратным к оператору j, если y×j = j×y = = id, т.е. их произведение в любом порядке дает тождественный оператор.
Если j имеет обратный оператор y, то для их матриц выполняется равенство:
Аj×Аy = Аy×Аj = Е, т.е. 
Если оператор j имеет обратный оператор y, то для их матриц А и В в произвольном фиксированном базисе e1, …,en выполняется условие А × В = В × А = Е. (Е – матрица оператора id.)
Следовательно, В = А-1 и оператор y однозначно определяется по оператору j (если он, конечно, существует) и обозначается j-1. Для существования же оператора j-1 необходимо и достаточно, чтобы матрица А оператора j в каком-либо базисе (а следовательно, и в любом) была бы обратима, что равносильно, как мы знаем, условиям ½A½¹ 0 Û rang A = n . В этом случае Im j = V, Ker j ={0} и отображение j является изоморфизмом.
§5. Общие замечания, относящиеся ко всем вариантам
Обозначим матрицы данных операторов j, y и оператора c = jy в стандартном базисе (i, j, k) соответственно через Aj , Ay и Ac. Нам надо, стало быть, найти эти матрицы. Aj и Ay мы найдем, используя определение матрицы линейного оператора (§ 2, стр. 7 – 8), при рассмотрении конкретных задач. Сразу отметим здесь, что, зная эти матрицы, по свойству матрицы произведения двух линейных операторов (см. § 4, стр. 15 – 16) можно найти матрицу Ac:
Ac = Ay · Aj .
Таким образом, матрица Ac легко вычисляется, если уже найдены матрицы Aj и Ay.
Чтобы выяснить, обратим ли оператор c, можно вычислить определитель его матрицы. Допустим, что det Ac ≠ 0. Тогда у оператора c существует обратный оператор (см. § 4, стр. 16). А так как
det Ac = det (Ay Aj) = det Ay∙det Aj ,
то det Aj и det Ay также отличны от нуля. Отсюда, как легко видеть, вытекает, что операторы j и y также обладают обратными; при этом
c–1 = (jy)–1 = y–1∙j–1,
т. е. сначала выполняется оператор y–1, а затем j–1. На этом пути можно дать геометрическое описание оператора c–1, если геометрическое описание операторов j–1 и y–1 нам известно (обычно оно получается легко, если операторы j и y действительно обратимы; см. нижеприведенные примеры).
Если же det Ac = 0, то тогда, в силу вышеприведенного равенства det Ac = det Ay∙det Aj , хотя бы один из операторов j и y не имеет обратного. Для указания причины необратимости оператора достаточно, следовательно, указать, какой из операторов j и yнеобратим (может быть, что и оба). Необратимость же оператора вытекает из того, что он не является биективным. А это, в свою очередь, следует из того, что оператор имеет ненулевое ядро или его образ не совпадает со всем пространством (т.е. оператор не является инъективным или сюръективным). Поэтому студенту в работе следует указать (и обосновать!), что, например, оператор yне является инъективным (или сюръективным).
§ 6. Примеры.
1. Рассмотрим поворот трехмерного пространства (R3) вокруг оси OY на 45°. Обозначим этот оператор через j. (Очевидно, что j действительно есть линейный оператор.) Если не указано иначе, то подразумевается, что поворот осуществляется против часовой стрелки, если смотреть из конца оси OY (точнее, смотреть вдоль этой оси в направлении, противоположном стрелке). Прежде всего запишем матрицу этого оператора. Из геометрических соображений ясно, что плоскость XOZ, перпендикулярная к оси OY, будет вращаться внутри себя, поэтому поворот вектора i будет осуществляться в пределах этой плоскости. Координаты вектора j(i) в плоскости XOZ будут равны {  ; – }, т. е. j(i) = i – k. Далее, j(j) = j (вектор j при заданном вращении не меняется), а j(k) = i + k. Таким образом, искомая матрица равна:
; – }, т. е. j(i) = i – k. Далее, j(j) = j (вектор j при заданном вращении не меняется), а j(k) = i + k. Таким образом, искомая матрица равна:
Aj =  .
. 
Этот оператор обратим – обратным к нему будет оператор поворота на угол 45° в противоположную сторону. (Обратимость данного оператора следует также из невырожденности матрицы Aj – ее определитель равен 1.)
Найдем теперь ядро и образ этого оператора. Так как любой вектор имеет прообраз, то образ совпадает со всем пространством R3. Что же касается ядра, то это по определению множество всех векторов, переходящих в нуль. Так как при повороте длина вектора не меняется, то таковым может быть только нулевой вектор. Итак, ядро в данном случае равно нулевому подпространству. Впрочем, мы могли воспользоваться общим утверждением: если линейный оператор обратим, то у него нулевое ядро, а его образ есть всё пространство.
2. Обозначим через y ортогональное проектирование на плоскость x = y. Из свойств проекции вытекает, что оператор проектирования на ось или на плоскость всегда линеен (см. § 1, пример 3).
Ясно, что
y(i) =  i + j;
i + j;
y(j) = i + j;
y(k) = k.
Чтобы получить эти результаты, можно воспользоваться формулой проекции вектора a на плоскость p (в этой формуле проекция рассматривается как вектор):
прp a = a –  .
.
Здесь n – произвольный ненулевой вектор, нормальный к данной плоскости. В нашем случае в качестве такового можно взять вектор {1; –1; 0}. Поэтому, например,
y(i) = прp i = i –  = i – n = { ; ; 0}
= i – n = { ; ; 0}
и аналогично для других проекций. Это дает матрицу:
Ay =  .
.
Рассматриваемый оператор необратим (т.к. он неинъективен: y(i) = y(j). Он также не является сюръективным – образы всех векторов заполняют плоскость x = y, но не заполняют всего пространства). Необратимость оператора y вытекает также из того, что det Ay = 0 (первые две строки матрицы Ay одинаковы).
Найдем ядро и образ оператора y. Так как образы всех векторов заполняют плоскость x = y, то эта плоскость и является образом нашего оператора. Что же касается ядра, то это по определению есть множество всех векторов, переходящих в нуль, т.е. в данном случае проектирующихся в нуль. Легко понять, что эти векторы заполняют прямую, перпендикулярную данной плоскости и проходящую через начало координат. Пользуясь знаниями аналитической геометрии, мы можем определить, что ядро – множество всех векторов, коллинеарных вектору {1; –1; 0} (т.к. этот вектор нормален к плоскости x – y = 0). То есть Ker y – линейная оболочка указанного вектора. (Напишите канонические или параметрические уравнения соответствующей прямой!)
3. Пусть оператор w – ортогональное проектирование на ось x = y, z = 0.
Оператор ортогонального проектирования, как уже отмечалось выше, линеен. Легко видеть, что
w(i) = { ; ; 0} = i + j;
w(j) = { ; ; 0} = i + j;
w(k) = 0.
Чтобы получить эти результаты, можно воспользоваться формулой проекции вектора на ось (в этой формуле проекция рассматривается как вектор):
пр l a =  .
.
Здесь l – произвольный ненулевой (направляющий) вектор данной оси. В нашем примере в качестве такового можно взять вектор {1; 1; 0}. Поэтому, например,
w(i) = пр l i =  = l = { ; ; 0}
= l = { ; ; 0}
и аналогично для других проекций. Таким образом, мы имеем:
Aw=  .
.
Оператор необратим (объясните, почему!).
Аналогично предыдущей задаче решается вопрос о ядре и образе. Образом будет данная ось (прямая, точнее, соответствующее одномерное подпространство векторов; то есть Im w является линейной оболочкой вектора {1; 1; 0}). Ядро же – совокупность векторов, перпендикулярных нашей оси. Эта совокупность является плоскостью, уравнение которой мы легко можем написать, пользуясь знаниями аналитической геометрии: x + + y = 0. (Найдите базис подпространства Ker y.)
4. Обозначим через s зеркальное отражение относительно плоскости y = z.
Здесь каждый вектор переходит в вектор, симметричный (зеркально отраженный) относительно указанной плоскости. (Докажите, что этот оператор линеен.) Найдем образы базисных векторов:
s(i) = {1; 0; 0} = i;
s(j) = {0; 0; 1} = k;
s(k) = {0; 1; 0} = j.
Чтобы получить эти результаты, можно воспользоваться следующей формулой, выражающей вектор d, симметричный данному вектору a относительно данной плоскости p:
d = a –  .
.
Здесь n – произвольный ненулевой вектор, нормальный к данной плоскости. В нашем случае в качестве такового можно взять вектор {0; 1; –1}. Поэтому, например,
s(j) = j –  = j – n = {0; 0; 1}
= j – n = {0; 0; 1}
и аналогично для других базисных векторов. Это дает матрицу:
As =  .
.
Матрица As невырождена, и, следовательно, оператор s обратим. Это ясно также из того, что любой оператор зеркального отражения (относительно плоскости или прямой) всегда обратен самому себе (объясните это).
Поскольку наш оператор обратим, то, как объяснялось выше (см. пример 1), у него нулевое ядро, а его образ есть всё пространство.
5. Пусть t – оператор зеркального отражения относительно прямой y = z, x = 0.
Этот оператор также обратим и обратен самому себе. Найдем его матрицу:
t(i) = {–1; 0; 0} = –i;
t(j) = {0; 0; 1} = k;
t(k) = {0; 1; 0} = j.
Чтобы получить эти результаты, можно воспользоваться формулой, выражающей вектор d, симметричный данному вектору a относительно данной оси:
d =  – a.
– a.
Здесь l – произвольный ненулевой (направляющий) вектор данной оси. В нашем примере в качестве такового можно взять вектор {0; 1; 1}. Поэтому, например,
t(j) =  – j = l – j = k
– j = l – j = k
и аналогично для других базисных векторов. Таким образом, мы имеем:
At =  .
.
Оператор t, будучи обратимым, имеет нулевое ядро, а его образ есть всё пространство.
6. Рассмотрим теперь векторное умножение на вектор 2i + j – k, т. е. на вектор d с координатами {2; 1; –1}. Обозначим это отображение R3 → → R3 через d. Из свойств векторного умножения легко вытекает, что d – линейный оператор (докажите!). Составим теперь матрицу этого линейного оператора (Ad). Действуя по определению линейного оператора, последовательно вычисляем:
d(i) = [i, d] =  = {0; 1; 1};
= {0; 1; 1};
d(j) = [j, d] =  = {–1; 0; –2};
= {–1; 0; –2};
d(k) = [k, d] =  = {–1; 2; 0}.
= {–1; 2; 0}.
Полученные строки записываем в столбцы матрицы Ad:
Ad =  .
.
Мы видим, что det Ad = 0 и, следовательно, оператор d необратим. Можно указать причину этого: d(d) = [d, d] = 0, а т. к. d(0) также есть 0, причем d ≠ ≠ 0, то на этих двух векторах (d и 0) нарушается инъективность.
Найдем теперь ядро и образ данного оператора. Ядру принадлежат те и только те векторы x, для которых [x, d] = 0. Последнее условие, как известно, равносильно тому, что векторы x и d коллинеарны. Таким образом, ядро нашего линейного оператора – это совокупность всех векторов, коллинеарных вектору d, т.е. это одномерное подпространство, являющееся линейной оболочкой вектора d. Для нахождения образа нашего линейного опратора, т.е. совокупности всех векторов вида [x, d], где вектор x пробегает всё пространство, заметим прежде всего, что все эти векторы перпендикулярны вектору d и, следовательно, лежат в плоскости, ему перпендикулярной и проходящей через начало координат. Так как сумма размерностей ядра и образа любого линейного оператора всегда равна размерности всего пространства, мы заключаем отсюда, что размерность образа в нашем случае должна быть равна двум, откуда вытекает, что образ оператора d совпадает с указанной плоскостью. Так как нормальным к этой плоскости вектором будет вектор d с координатами {2; 1; –1}, то уравнение этой плоскости будет таково:
2x + y – z = 0.
7. Решим задачу о произведении двух операторов. Найдем матрицу оператора c = jy, где j есть оператор поворота всего пространства на 45° вокруг оси OY (см. пример 1), а y – оператор проектирования на плоскость x = y (см. пример 2). Матрицу оператора c получим, перемножая матрицы операторов y и j (именно в этом порядке!):
Ac = Ay · Aj = = 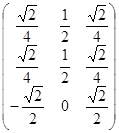 .
.
Как было объяснено выше, оператор c необратим. В качестве причины можно указать, например, несюръективность оператора c – образы всех векторов будут лежать в плоскости x = y, т. е. они не заполняют всего пространства. Или можно указать на вырожденность матрицы Ac (в ней две одинаковые строки).
8. Рассмотрим отображение, являющееся результатом последовательного выполнения операторов j (поворот на 45° вокруг оси OY, см. пример 1) и оператора s (зеркальное отражение относительно плоскости y = z, пример 4). Это отображение есть произведение js оператора j на оператор s и, следовательно, само является линейным оператором. Его матрица
Ajs = As · Aj = =  .
.
Этот оператор обратим (см. § 5); обратным к нему будет оператор последовательного выполнения сначала зеркального отражения относительно нашей плоскости x = y (s–1 = s), а затем поворота вокруг оси OY на угол 45° по часовой стрелке (если смотреть вдоль этой оси в направлении, противоположном стрелке; это оператор j–1).
Аналогичным образом находятся произведения любых других двух из рассмотренных нами операторов.
Учебное издание
Линейные операторы. Часть 1
Составители: БУСЯЦКАЯ Ирина Константиновна
АНДРЕЕВ Кирилл Кириллович
Редактор
Технический редактор
Подписано в печать Формат 60´84/16.
Бумага Усл. печ. л. Уч.-изд. л.
Изд. № . Тираж 175 экз. Заказ Бесплатно.
Московский государственный институт электроники и математики.
109028, Москва, Б. Трехсвятительский пер., 3/12.
Отдел оперативной полиграфии Московского государственного
института электроники и математики.
113054, Москва, ул. М.Пионерская, 12.
Дата добавления: 2021-03-18; просмотров: 101; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!