РАЗДЕЛ 1. ОБЗОР ПРЕДМЕТНОЙ ОБЛАСТИ
Департамент образования и науки города Севастополя
ГБОУ «Центр дополнительного образования
«Малая академия наук»
Отделение: Компьютерные науки
Секция: Робототехника
Модель “Робот-манипулятор”
(Роботизированная рука)
Работу выполнил:
Сапронов Марк,
ученик 4 класса, ГБОУ СОШ № 48
Руководитель:
Лобанова Татьяна Константиновна
педагог дополнительного образования ГБОУ ЦДО «Малая академия наук»
Севастополь
2021
Модель “Робот-манипулятор” (Роботизированная рука)
Сапронов Марк, ГБОУ ЦДО «Малая академия наук»,
ученик 4 класса, ГБОУ СОШ № 48,
Руководитель: Лобанова Татьяна Константиновна,
педагог ДО ГБОУ ЦДО «Малая академия наук».
Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов.
Манипуляторы выполняют работы в средах, недоступных или опасных для человека (подводные глубины, вакуум, радиоактивная среда и другие агрессивные среды), вспомогательные работы в промышленном производстве.
Манипуляторы используются в медицинской технике (например, в протезировании).
В узком смысле манипулятором называется механическая рука.
Цель творческой работы: на базе конструктора Lego WeDo 2.0 создать модель робота-манипулятора по собственному замыслу.
Работая нал проектом:
- были изучены простейшие механизмы и их применение в конструкциях роботов,
|
|
|
- были изучены возможности управления роботами, составляя различные программы,
- научились проектировать и программировать роботов по собственному замыслу.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ……………………………………………………………..… 4
РАЗДЕЛ 1. ОБЗОР ПРЕДМЕТНОЙ ОБЛАСТИ………………....……..7
РАЗДЕЛ 2. ОПИСАНИЕ РАЗРАБОТКИ…………………………..…10
ВЫВОДЫ…............................................................................................ …11
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ……………........... ..12
ВВЕДЕНИЕ
Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов.

Рис.1. Манипуля́тор.
Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе, путём замены (имплантации) ручного труда на механизм.
Роботизированная рука — это тип механической руки, обычно программируемой, с функциями, аналогичными человеческой руке. Рука может быть как самостоятельным механизмом, так и частью более сложного робота. Сегменты манипулятора имеют соединения, позволяющие совершать вращательные или поступательные движения. Роботизированная рука заканчивается либо захватным механизмом, либо каким-то рабочим инструментом.
|
|
|

Рис.2. Роботизированная рука.
Цель творческой работы: на базе конструктора Lego WeDo 2.0 создать модель робота-манипулятора по собственному замыслу.
Задачи, которые необходимо решить:
· Ознакомиться с существующими манипуляторами.
· Применить знания, полученные на занятиях в творческом объединении «Образовательная робототехника Lego WeDo» на практике.
· Придумать форму модели.
· Выбрать механизм, который будет приводиться в движение.
· Собрать модель из деталей конструктора.
· Запрограммировать модель.
· Провести испытания.
· Оформить отчет по проделанной работе.
Объект исследования: использование роботизированной руки.
Предмет исследования - роботизированная рука.
Основные методы исследования: моделирование, конструирование и программирование модели с помощью конструктора LEGO WeDo 2.0.
Новизна данной работы заключается в создании модели манипулятора, которая должна двигать предметы из деталей Lego WeDo 2.0.
|
|
|
РАЗДЕЛ 1. ОБЗОР ПРЕДМЕТНОЙ ОБЛАСТИ
Робот в переводе с чешского означает «работать», а робот манипулятор – устройство, которое принудительно можно вращать в разные стороны, заставляя выполнять те или иные операции. Разработаны они, чтобы выполнять повторяющиеся действия вместо человека сложные, а порой опасные операции. В управлении роботы манипуляторы простые.
Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов (Рис. 1.1.). Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе, путём замены (имплантации) человеческого труда на механизм.

Рис. 1.1. Роботы манипуляторы.
Основу манипуляторов составляют пространственные механизмы со многими степенями свободы (Рис. 1.2.). Манипуляторы выполняют работы в средах, недоступных или опасных для человека (подводные глубины, вакуум, радиоактивная среда и другие агрессивные среды), вспомогательные работы в промышленном производстве. Манипуляторы используются в медицинской технике (например, в протезировании). Перечислить все сферы, где могут применяться роботы-манипуляторы, попросту невозможно. Но одно можно с уверенностью сказать уже прямо сейчас: нет таких сфер нашей жизни, где использование роботов было бы невозможно.
|
|
|
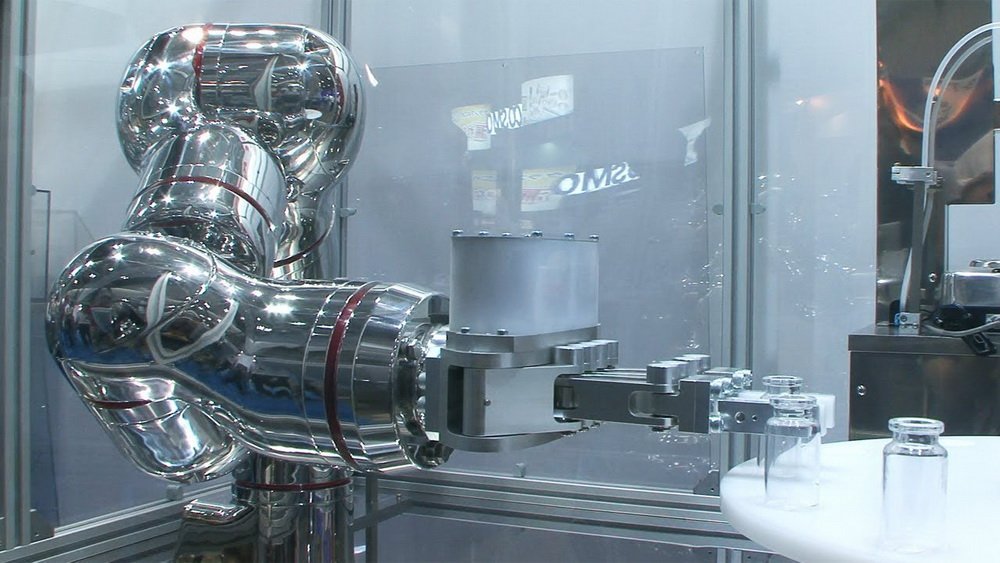
Рис. 1.2. Робот из нержавеющей стали с семью степенями свободы. Используется в химической промышленности для автоматизации экспериментов.
В узком смысле манипулятором называется механическая рука (Рис. 1.3.).

Рис. 1.3. Робот манипулятор механическая рука.
Дата добавления: 2021-03-18; просмотров: 100; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!