ХАРАКТЕРИСТИКИ ПЕРВИЧНЫХ ДВИГАТЕЛЕЙ
БАЛАНС МОЩНОСТЕЙ И РЕГУЛИРОВАНИЕ ЧАСТОТЫ В ЭЭС
4.1. БАЛАНС АКТИВНЫХ И РЕАКТИВНЫХ МОЩНОСТЕЙ
В ЭНЕРГОСИСТЕМЕ
Электроэнергия, вырабатываемая на электрических станциях в ЭЭС за сколь угодно малый ощутимый для человека промежуток времени, тут же потребляется нагрузками и расходуется на потери при ее передаче. Говорят, что имеет место одновременность процессов выработки и потребления электроэнергии.
Суммарная мощность генерации в ЭЭС SPг в каждый момент времени равна потребляемой мощности SPп. То же самое можно сказать и для реактивной мощности SQг и SQп:

| (4.1) (4.2) |
где SPн и SQн – суммарные активная и реактивная мощности нагрузок ЭЭС; SPсн и SQсн – суммарные активная и реактивная мощности собственных нужд электростанций; SDP и SDQ – суммарные активные и реактивные потери мощности в ЭЭС; SQС – суммарная зарядная мощность ЛЭП.
Уравнения (4.1) и (4.2) представляют так называемый баланс мощностей, который является составной частью баланса мощности в ЭЭС, учитывающего выработку не только электрической энергии, но и тепла.
|
Рис. 4.1. Эквивалентная схема ЭЭС |
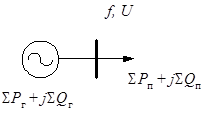
Рассмотрим эквивалентную схему ЭЭС, в которой эквивалентный генератор вырабатывает суммарную мощность энергосистемы SPг + jSQг, которая передается на приемные шины, с которых питаются все нагрузки ЭЭС посредством электрических сетей, включая мощности собственных нужд электростанций (рис.1.1). В простейшем случае в этой схеме может быть установлен один реальный генератор, который питает некоторую нагрузку, расположенную в непосредственной близости от генератора.
|
|
|
В установившемся режиме мощности нагрузки представляются их статическими характеристиками по частоте и напряжению [1]
 . .
| (4.3) |
Суммарные мощности потребления в ЭЭС также зависят от f и U
 . .
| (4.4) |
Следовательно, баланс мощностей в ЭЭС отвечает определенным значениям частоты и напряжения.
Частота и напряжения в ЭЭС не могут оставаться постоянными, так как потребление активной и реактивной мощности непрерывно изменяется. ГОСТ 13109-97 определяет требования к показателям качества электрической энергии, среди которых основными являются отклонения частоты от номинальной Df и отклонения напряжения на шинах электроприемников V.
|
Нормальное отклонение частоты переменного тока в ЭЭС в соответствии с ГОСТ составляет ±0,2 Гц, а предельно допустимое ±0,4 Гц, нормальное отклонение напряжения на выводах электроприемников составляет ±5 %, а предельно допустимое ±10 %. (для специальных электроприемников и электрооборудования электрических систем имеются также и другие требования, см. раздел 2).
|
|
|
С учетом (4.4) баланс мощностей (4.1) и (4.2) можно переписать как:
| (4.5) (4.6) |
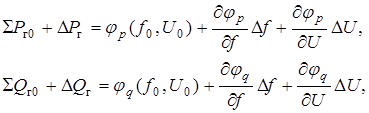
Обозначим параметры некоторого исходного режима индексом 0 (ноль), тогда при каких либо малых отклонениях от исходного режима DPг = åPг - åPг0 и DQг = åQг - åQг0 будут иметь место отклонения частоты и напряжения Df = f - f0 и DU = U - U0. При этом уравнения (4.5) и (4.6) можно представить приближенными линеаризованными зависимостями между отклонениями параметров (разложение в ряд Тейлора с сохранением только линейных членов):
|
где частные производные вычислены в точках f0 и U0.
С учетом того, что в исходном режиме соблюдается баланс мощности
|
получим систему линейных алгебраических уравнений:
| (4.7) (4.8) |
в которой частные производные обозначены соответственно: af, aU, bf и bU.
Система уравнений (4.7), (4.8) определяет связь между изменениями частоты и напряжения с изменениями генерируемой активной и реактивной мощностями.
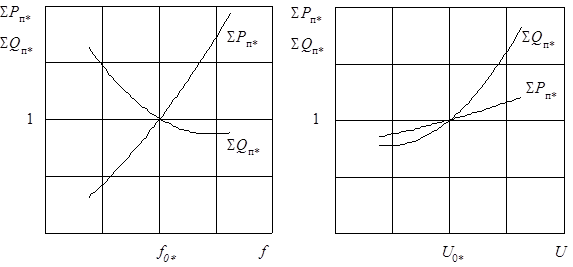
Обобщенные статические характеристики потребления активной и реактивной мощности для ЭЭС изображены на рис. 4.2.
а б
Рис. 4.2. Статические характеристики потребления активной
|
|
|
и реактивной мощности по частоте (а) и по напряжению
(б) (в относительных единицах)
Коэффициенты af, aU, bf и bU называются регулирующими эффектами нагрузки по частоте и напряжению. Чем больше величина этих коэффициентов, тем больше угол наклона линеаризованных зависимостей к оси абсцисс и тем сильнее реакция активной и реактивной мощности на изменения частоты или напряжения:
|
где af, aU, bf bU – углы касательных к оси абсцисс в точках f0 и U0 для соответствующих статических характеристик.
Решим систему уравнений (4.7), (4.8), для этого перепишем ее в матричном виде.
| (4.9) |
Найдем матрицу, обратную к  и умножим на неё слева левую и правую части уравнения (4.9). Определитель исходной матрицы
и умножим на неё слева левую и правую части уравнения (4.9). Определитель исходной матрицы
 . .
|
есть положительная величина, так как af × bU > 0, а aU × bf < 0 (см. рис. 4.2).
В результате имеем:
| (4.10) |
или
| (4.11) (4.12) |
По данным соотношениям можно увидеть влияние изменений генерируемых мощностей на изменение частоты и напряжения.
Пусть DPг < 0 и для простоты DQг = 0. Тогда
|
и
|
откуда следует, что уменьшение SPг приводит к уменьшению как частоты, так и напряжения.
Пусть, теперь, DQг < 0, а DPг = 0. В этом случае
|
|
|
|
и
 . .
|
Отсюда с учетом af >> aU, следует, что снижение реактивной мощности в большей степени сказывается на снижении напряжения, чем на изменении частоты.
Таким образом, можно сделать следующие выводы:
· при снижении генерируемых мощностей в системе происходят изменения как частоты, так и напряжения;
· снижение генерируемой активной мощности приводит к уменьшению и частоты и уменьшению напряжения;
· снижение генерируемой реактивной мощности приводит к уменьшению напряжения и незначительному повышению частоты.
Физически повышение частоты при снижении генерируемой реактивной мощности можно объяснить снижением потерь активной мощности в сети, что приводит к уменьшению потребляемой активной мощности в ЭЭС.
Аналогичные выводы можно сделать и для положительных изменениях генерируемых мощностей.
В результате, можно установить какие воздействия на режим ЭЭС следует предпринять, чтобы осуществить регулирование частоты и напряжения, а именно:
· для регулирования частоты используется изменение генерируемой активной мощности регулированием пуска энергоносителя (пара или воды) в турбину;
· так как изменение генерируемой активной мощности определяется требованиями регулирования частоты, то для регулирования напряжения используется изменение реактивной мощности, что, в свою очередь, требует регулирования тока возбуждения синхронного генератора.
Следует отметить, что частота в ЭЭС одинакова во всех ее точках (рассматриваются только установившиеся режимы), а напряжения различны во всех узлах сети, поэтому, говоря о регулировании напряжения, следует иметь в виду какой-то один определенный узел или группу узлов, в которых требуется одновременно изменять напряжение (увеличивать или уменьшать).
ХАРАКТЕРИСТИКИ ПЕРВИЧНЫХ ДВИГАТЕЛЕЙ
Мощности потребителей меняются в каждый момент времени, причем изменения могут проходить медленно или скачками.
Медленные изменения проявляются изо дня в день почти одинаково, и, следовательно, их можно прогнозировать. На них накладываются резкие быстрые изменение, носящие, как правило, случайный характер.
Причиной резких изменений мощности являются аварийные отключения генераторов, что приводит к дефициту генерирующих мощностей, отключения нагрузок, что наоборот дает избыток генерирующих мощностей, а также включения и отключения элементов электрической сети.
В случае резкого наброса или резкого сброса нагрузки мгновенный небаланс мощности компенсируется кинетической энергией, обусловленной инерцией вращающихся машин (генераторов, двигателей). Это вызывает понижение (или повышение) частоты. Для устранения отклонения частоты необходимо восстановить равновесие между генерацией и потреблением мощности, что достигается изменением мощности турбины с помощью регулирования пуска в нее энергоносителя.
Рассмотрим характеристики первичных двигателей – тепловых и гидравлических турбин, определяющих изменение их мощности под действием систем регулирования. На рис. 4.3 показана схема преобразования энергии пара или воды в электрическую энергию.
В установившемся режиме имеет место равновесие моментов сил на валу турбо- или гидрогенератора: Mмех = Mэл.м. Мощность, развиваемая турбиной передается генератору: Pт = Pг при определенной скорости вращения турбины W. Мощность турбины определяется механическим моментом: Pт = MмехW, а мощность генератора – током статора генератора:  .
.
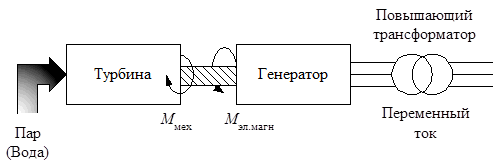
Рис. 4.3. Схема преобразования энергии
Снижение нагрузки в ЭЭС приведет к уменьшению тока в обмотках статора генератора и снижению электромагнитного момента на валу ротора. Механический момент окажется больше электромагнитного момента Mмех > Mэл.м и под воздействием избыточного механического момента скорость вращения ротора начнет увеличиваться.
В случае нерегулируемой турбины её мощность Pт остается неизменной и с увеличением скорости момент Mмех будет снижаться до значения M1, которое даст новое равновесие моментов сил (рис. 4.4). При этом скорость вращения турбины установится на значении W1. На рис. 4.4 время t0 обозначает момент снижения нагрузки системы.
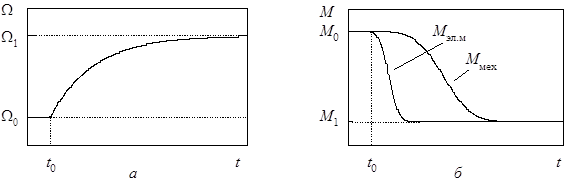
Рис. 4.4. Изменение скорости вращения (а) и механического момента (б) турбины
В случае регулируемой турбины увеличение ее скорости вращения приведет в действие автоматический регулятор скорости (АРС), который обеспечит уменьшение подачи энергоносителя (пара или воды) в турбину с тем, чтобы сохранить постоянной скорость вращения ротора генератора.
Принцип работы АРС основан на обратной отрицательной связи (ООС) системы регулирования: при повышении регулируемого параметра система уменьшает, а при снижении – увеличивает подачу энергоносителя.
АРС, который вступает в действие с некоторым запаздыванием Dtзап, изменит характер процесса. Этот процесс может быть либо апериодическим, либо колебательным, рис. 4.5,а и б соответственно. Под действием АРС либо восстановится прежняя скорость W0, либо установится скорость W¢0, близкая к W0.
В первом случае, когда после изменения нагрузки и окончания переходного процесса АРС восстанавливает прежнюю скорость, регулирование называется астатическим. В противном случае, когда устанавливается скорость отличная от прежней, регулирование называется статическим и система регулирования также называется статической.
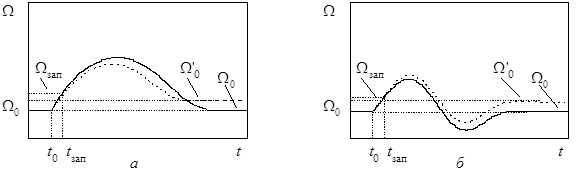
Рис. 4.5. Изменение скорости вращения турбины при апериодическом (а) и колебательном (б) характере процесса
|
Рис. 4.6. Характеристика АРС |
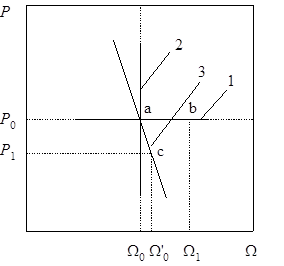
Характеристику АРС турбины часто представляют в координатах скорости и мощности генератора, рис. 4.6. В случае нерегулируемой турбины мощность P0 остается постоянной, а меняется только скорость (прямая 1 – рабочая точка исходного режима a, нового режима b). В случае астатического регулирования наоборот, скорость вращения турбины поддерживается постоянной, при этом мощность регулируется пуском энергоносителя (прямая 2). При статизме регулятора характеристика наклонена к оси абсцисс (прямая 3) и при изменении нагрузки ЭЭС скорость не восстанавливается до прежнего значения (рабочая точка c). Новая скорость тем сильнее отличается от первоначальной, чем больше статизм системы регулирования, т. е. чем больше угол между характеристикой АРС и осью ординат. Коэффициент kг, равный тангенсу угла наклона характеристики АРС к оси абсцисс, называется крутизной характеристики регулирования.
Дата добавления: 2021-03-18; просмотров: 157; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!