Горизонтальное оперение самолета Як-40.
ДОКАЗАТЕЛЬСТВА ДОСТОВЕРНОСТИ ОТКРЫТИЯ
Часть I .
ЛИНЕЙНЫЕ ЗАДАЧИ.
В предлагаемом разделе излагаются доказательства достоверности в хронологическом порядке их получения автором. Основная часть их изложена в монографии [5] и защищена в его докторской диссертации.
§ 1.1. Развитие силовой схемы оперения
Вопросы расчета оперения, имеющего руль, навешенный по статически неопределимой схеме, считаются достаточно хорошо разработанными, установившимися [8] и в периодических научных изданиях им не уделяется внимания уже три-четыре десятилетия.
Руль и стабилизатор, как правило, представляют собой тонкостенные стержни, расчет которых можно проводить методами, построенными для крыла, если известны эпюры их изгибающих и крутящих моментов, а также перерезывающих сил. Для построения эпюр необходимо знать реакции в узлах навески руля, определение которых проводится или по теореме трех моментов в предположении абсолютной жесткости стабилизатора, или методом сравнения перемещений [8]. Заметим, что всегда, насколько нам известно, расчет этот проводится в предположении, что руль и стабилизатор находятся в одной плоскости. Но ведь внешняя нагрузка на оперение почти во всех расчетных случаях определяется углом отклонения руля. В существующей схеме расчета имеется какой-то разрыв: нагрузка определяется по углам отклонения, а затем проводится расчет на прочность оперения с неотклоненным рулем. Более того, и статические испытания проводятся при нейтральном положении руля.
|
|
|
Такое рассогласование, на наш взгляд, определилось эволюцией развития конструкции оперения и методов его расчета. Методы определения реакций в узлах навески многошарнирных рулей сложились еще в тридцатые годы, когда конструкции выполнялись с полотняной обшивкой и основным элементом руля был трубчатый лонжерон (рис. 1.1.1,а), поворот которого не мог существенно изменить долю жесткости руля в общей системе стабилизатор руль, а следовательно, и величину реакций в кронштейнах навески. Ведь изгибные жесткости руля с полотняной обшивкой относительно осей и , т.е.  и
и  , близкие величины.
, близкие величины.
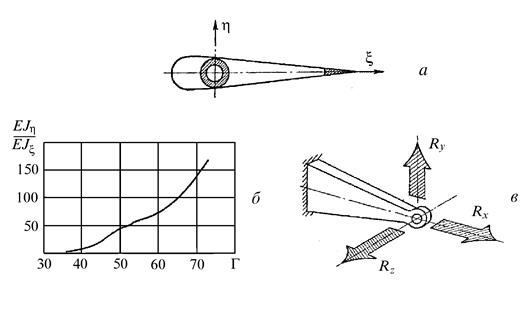
Рис. 1.1.1
Далее эволюция развития конструкции оперения пошла по пути увеличения жесткости обшивки, сначала в лобовой части руля, затем и в хвостовой. Увеличение скоростей полета привело к тому, что доля воздушной нагрузки на оперение, воспринимаемой рулем, значительно возросла. Это увеличило изгибную жесткость рулей и количество точек крепления их на стабилизаторе. В настоящее время существуют рули, навешенные на девяти опорах, а также рули, у которых обшивка подкреплена стрингерным набором. При малых относительных толщинах современных оперений, достигающих 46%, руль представляет собой тонкостенный стержень с очень маленькой строительной высотой, который выгодно выполнять как трехслойную пластину, появились рули с сотовым заполнителем. В рулях со стрингерами, а тем более, с заполнителем обшивка может работать с высокими напряжениями и при вычислении моментов инерции должна учитываться почти полностью. Так и делают при вычислении  . Лобовой момент инерции руля
. Лобовой момент инерции руля  , как правило, не вычисляют, так как традиционные методы расчета не требуют этого [8].
, как правило, не вычисляют, так как традиционные методы расчета не требуют этого [8].
|
|
|
Эволюция развития конструкции оперения привела к тому, что рули превратились в стержни, лобовая жесткость E которых в десятки, а иногда и в сто раз больше нормальной E . Некоторые конструкторы, чтобы избавиться от тяжелых "бесполезных" балансиров, выполняют носовую часть рулей из толстой стальной обшивки, как бы размазывая балансиры по носику руля: и балансировка сохраняется, и обшивка еще лучше выполняет свою роль. У таких рулей соотношение  особенно велико. На рис. 1.1.1,б изображена примерная кривая, определяющая изменение максимального соотношения
особенно велико. На рис. 1.1.1,б изображена примерная кривая, определяющая изменение максимального соотношения  по годам развития авиации, показывающая тенденцию постоянного роста этого соотношения. Рассчитывая современные конструкции, необходимо учитывать влияние лобовой изгибной жесткости руля при его отклонении. Использование старой расчетной схемы приводит не только к ошибочному определению реакций, но и к неправильному пониманию работы составных стержней типа стабилизатора с рулем, соединенных через кронштейны.
по годам развития авиации, показывающая тенденцию постоянного роста этого соотношения. Рассчитывая современные конструкции, необходимо учитывать влияние лобовой изгибной жесткости руля при его отклонении. Использование старой расчетной схемы приводит не только к ошибочному определению реакций, но и к неправильному пониманию работы составных стержней типа стабилизатора с рулем, соединенных через кронштейны.
|
|
|
Отклонение руля, во-первых, изменяет долю его жесткости, которая вместе со стабилизатором воспринимает поперечный изгиб. Изменение этой жесткости может существенно изменить нормальные реакции  в узлах навески. М.Ф. Астахов пишет: "Подсчет реакций должен производиться тщательно. Возможны случаи, когда при уменьшении реакции в крайнем шарнире на 10% изгибающие моменты в других сечениях могут измениться в несколько раз" (см. [8, фиг. 236]).
в узлах навески. М.Ф. Астахов пишет: "Подсчет реакций должен производиться тщательно. Возможны случаи, когда при уменьшении реакции в крайнем шарнире на 10% изгибающие моменты в других сечениях могут измениться в несколько раз" (см. [8, фиг. 236]).
Отклоненный руль, во-вторых, участвуя в поперечном изгибе системы стабилизатор руль, изгибается и в плоскости своей наибольшей жесткости. Этот изгиб может быть осуществлен лишь в результате возникновения в шарнирах навески лобовых реакций  , лежащих в плоскости стабилизатора и направленных вдоль оси соответствующих кронштейнов навески руля (рис. 1.1.1,в).
, лежащих в плоскости стабилизатора и направленных вдоль оси соответствующих кронштейнов навески руля (рис. 1.1.1,в).
|
|
|
Таким образом, расчет оперения с учетом отклонения руля выявляет новые силы лобовые реакции в шарнирах, величина которых, как показывают расчеты реальных конструкций, может оказаться больше, чем реакции , определяемые существующей расчетной схемой. Никаких замечаний о существовании этих сил ни в отечественной, ни в зарубежной литературе встретить не удалось.
Третьей существенной особенностью многошарнирного оперения, имеющего руль с большой лобовой жесткостью, является определяющее влияние последней на величину шарнирного момента при отклонении руля. Замеченный факт значительного увеличения лобовой изгибной жесткости руля должен сказаться на величине шарнирного момента. Если при малой лобовой жесткости руля усилия управления связаны в основном с преодолением воздушной нагрузки, действующей на руль, то при большой жесткости необходимы еще и усилия, изгибающие руль в своей плоскости, так как его приходится поворачивать относительно криволинейной оси, и лобовой изгиб при этом неизбежен.
Совершенствование метода расчета.
Лобовые реакции.
Предлагаемый метод расчета многошарнирного оперения с учетом отклонения руля [2] по существу представляет собой метод сравнения перемещений [8], в котором приходится увязывать перемещения руля и стабилизатора не только в вертикальной, но и в горизонтальной плоскости.
Рассматривается оперение, руль которого навешен на (п+2) шарнирах (рис. 1.1.2), где n = 1, 2, 3, ..., и отклонен на угол .
Оперение может иметь переменную по длине жесткость и произвольную внешнюю нагрузку. Решение заключается в определении реакций и в шарнирах навески и строится в следующих предположениях:
1) руль и стабилизатор жестки на кручение;
2) лобовая изгибная жесткость стабилизатора велика;
3) кронштейны навески руля жестки в направлении и и податливы (все, кроме одного) в направлении оси z .
Для решения этой статически неопределимой задачи выбираем основную систему: руль предполагается навешенным только на крайние шарниры. При таком креплении точки i' руля и i стабилизатора под воздействием внешней нагрузки разойдутся (на рис. 1.1.2,б изображена i-я точка).
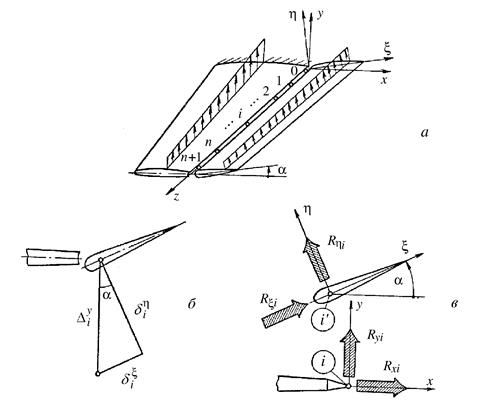
Рис. 1.1.2
Для выполнения условий их совместности необходимо в каждом шарнире к рулю и стабилизатору приложить усилия: к стабилизатору и , к рулю  и
и  (на рис. 1.1.2,в изображены положительные направления векторов сил). Известно, что равнодействующие векторов и , а также и , и представляют собой равные и противоположно направленные векторы, на основании чего
(на рис. 1.1.2,в изображены положительные направления векторов сил). Известно, что равнодействующие векторов и , а также и , и представляют собой равные и противоположно направленные векторы, на основании чего
 (1.1.1)
(1.1.1)
Под действием этих, пока еще не известных, сил i'-я точка руля и i-я точка стабилизатора должны совместиться. Если предположить, что эти перемещения происходят лишь в плоскости сечения, то для каждой из n точек можно записать по два условия:
 (1.1. 2)
(1.1. 2)
Здесь  и
и  перемещение i-й точки стабилизатора в направлениях x и y;
перемещение i-й точки стабилизатора в направлениях x и y;  и
и  перемещения i-й точки руля в направлениях x и y.
перемещения i-й точки руля в направлениях x и y.
Условимся вычислять перемещения относительно оси z, считая, что она всегда проходит через точки 0 и n + 1. На основании высказанного предположения о большой жесткости стабилизатора в направлении оси x перемещение = 0 и первое условие (1.1.2) примет вид:
= 0. (1.1.3)
Такое перемещение руля выгодно представить в виде геометрической суммы (рис. 1.1.2,б) перемещений:  в плоскости хорд руля и
в плоскости хорд руля и  по нормали к плоскости хорд, т.е.
по нормали к плоскости хорд, т.е.
Тогда условия (1.1.2) с учетом (1.1.3) запишутся так:
 (1.1.4)
(1.1.4)
Таких условий можно записать 2n для определения 2n неизвестных  и
и  .
.
Не зная пока  и , найдем перемещения, входящие в (1.1.4), от единичного загружения. Будем последовательно прикладывать единичную нагрузку во всех шарнирах навески. Приложим ее в k-м шарнире в следующем виде: зададим
и , найдем перемещения, входящие в (1.1.4), от единичного загружения. Будем последовательно прикладывать единичную нагрузку во всех шарнирах навески. Приложим ее в k-м шарнире в следующем виде: зададим  и
и  , они приложены к рулю и вызывают в i-й точке руля перемещения
, они приложены к рулю и вызывают в i-й точке руля перемещения  и
и  . Отыскивать перемещения стабилизатора от нагрузки в направлении осей и неудобно. Лучше отыскивать перемещения в главных центральных осях от нагрузки, приложенной в направлении тех же осей.
. Отыскивать перемещения стабилизатора от нагрузки в направлении осей и неудобно. Лучше отыскивать перемещения в главных центральных осях от нагрузки, приложенной в направлении тех же осей.
Найдем, таким образом:  перемещение в i-м шарнире стабилизатора в направлении оси y от единичной силы, приложенной в k-м шарнире и направленной по оси y. Аналогичные перемещения руля и стабилизатора в основной системе от внешнего загружения обозначим соответственно через
перемещение в i-м шарнире стабилизатора в направлении оси y от единичной силы, приложенной в k-м шарнире и направленной по оси y. Аналогичные перемещения руля и стабилизатора в основной системе от внешнего загружения обозначим соответственно через  , и тогда полные перемещения можно записать:
, и тогда полные перемещения можно записать:
 (1.1.5)
(1.1.5)
Условия (1.1.4) выполнятся лишь в том случае, если  в (1.1.5) примут истинные значения. Найдем реакции из уравнений (1.1.1) с учетом (1.1.5) и (1.1.1).
в (1.1.5) примут истинные значения. Найдем реакции из уравнений (1.1.1) с учетом (1.1.5) и (1.1.1).
 (1.1.6)
(1.1.6)
Преобразуем уравнения (1.1.6) к каноническому виду относительно неизвестных реакций и запишем в виде совместных подсистем:
 (1.1.7)
(1.1.7)
 (1.1.8)
(1.1.8)
коэффициенты которых имеют вид:
 (1.1.9)
(1.1.9)
Здесь  ,
,  ,
,  ,
,  .
.
Выражения (1.1.9) справедливы и при i = k .
Совместное решение систем (1.1.7) и (1.1.8) дает реакции и  во всех n промежуточных шарнирах.Реакции в крайних шарнирах определятся так:
во всех n промежуточных шарнирах.Реакции в крайних шарнирах определятся так:
 (1.1.10)
(1.1.10)

Здесь  и
и  составляющие полных реакций в k-м шарнире, индекс 0 и n+1 внизу означает номер шарнира, а индексы 0 или 1k вверху определяют соответственно загружение основное или единичное. Например:
составляющие полных реакций в k-м шарнире, индекс 0 и n+1 внизу означает номер шарнира, а индексы 0 или 1k вверху определяют соответственно загружение основное или единичное. Например:  составляющая реакции в направлении оси y в (n+1)-м шарнире от основного загружения:
составляющая реакции в направлении оси y в (n+1)-м шарнире от основного загружения:  составляющая реакции в направлении оси x в нулевом шарнире от единичной силы, приложенной в k-м шарнире.
составляющая реакции в направлении оси x в нулевом шарнире от единичной силы, приложенной в k-м шарнире.
Достоверность результатов, полученных в §1, подтверждена экспериментально, как на моделях, так и на реальных конструкциях. Приведены результаты эксперимента на модели трехопорного руля, отклоненного на некоторый угол, сечения которого практически не закручиваются в процессе деформации, что дает нам право рассчитывать его по методу [2]. Сравнение с результатами расчета модели, проведенного указанным методом, показывает на достаточную правоверность принятых при описании предложенной расчетной схемы гипотез. Приведены результаты эксперимента горизонтального оперения самолета Як-40, хорошо согласующиеся с расчетом по вышеуказанному методу.
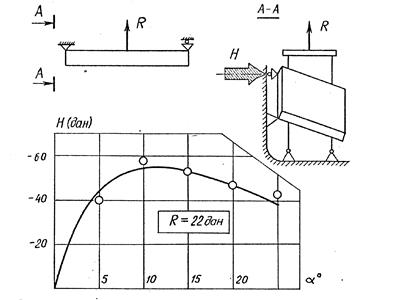
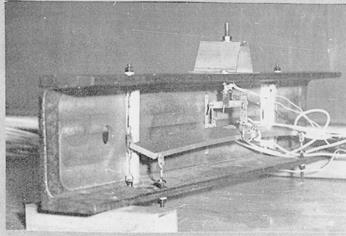
Рис . 1.1.3
Создана экспериментальная установка, внешний вид которой представлен на фотографии (рис. 1.1.3). Отклоненный руль моделируется трехопорной пластинкой из материала Д-16, длина которой 300 мм, сечение постоянно по длине и равно 4х9х25. Соотношение между максимальной и минимальной жесткостями изгиба пластинки равно 26. Отклоненная на некоторый угол пластинка загружается силой  в средней опоре, которая может перемещаться лишь в вертикальной плоскости (на разрезе А-А пластинка изображена в деформированном состоянии). Такая загрузка пластинки соответствует деформированию жесткого на кручение руля, который навешен на стабилизаторе абсолютно жестком в своей плоскости, при этом руль не загружен собственной нагрузкой, а деформируется лишь за счет реакций и
в средней опоре, которая может перемещаться лишь в вертикальной плоскости (на разрезе А-А пластинка изображена в деформированном состоянии). Такая загрузка пластинки соответствует деформированию жесткого на кручение руля, который навешен на стабилизаторе абсолютно жестком в своей плоскости, при этом руль не загружен собственной нагрузкой, а деформируется лишь за счет реакций и  , являющихся результатом изгиба стабилизатора.
, являющихся результатом изгиба стабилизатора.
Загружение и соответствующая ему в средней (подвижной) опоре осуществлялись тензометрическими тягами. Изменение по  при постоянном
при постоянном  дан , полученное экспериментально, изображено точками на графике рис. 1.1.3. Сравнение с теоретической кривой говорит о достоверности предложенной расчетной схемы.
дан , полученное экспериментально, изображено точками на графике рис. 1.1.3. Сравнение с теоретической кривой говорит о достоверности предложенной расчетной схемы.
Горизонтальное оперение самолета Як-40.
Эксперимент, описанный ниже, проведен на серийной машине Як-40, как дополнение к программе испытаний. В отличии от многих других программ, при испытании Як-40 требовалось провести нагружение стабилизатора до 100% расчетной нагрузки с рулем, отклоненным вверх на  .
.
На кронштейны навески руля, которые не имеют серьги и поэтому загружены тремя составляющими реакции , и  , были наклеены тензодатчики по схеме, изображенной на рис. 1.1.4. Датчики
, были наклеены тензодатчики по схеме, изображенной на рис. 1.1.4. Датчики  и
и  имеют в том же сечении симметрично расположенные датчики
имеют в том же сечении симметрично расположенные датчики  и
и  на нижнем поясе кронштейна. Напряжения в точках наклейки датчиков
на нижнем поясе кронштейна. Напряжения в точках наклейки датчиков  ,
,  ,
,  и
и  можно записать через значения напряжений в этих точках, вызываемые отдельными составляющими реакций , , .
можно записать через значения напряжений в этих точках, вызываемые отдельными составляющими реакций , , .
Для кронштейна, имеющего две плоскости симметрии, они примут вид:

 (1.1.11)
(1.1.11)
Здесь  - площадь кронштейна в сечении наклейки тензодатчиков,
- площадь кронштейна в сечении наклейки тензодатчиков,
 ,
,  - моменты инерции сечения кронштейна относительно соответствующих осей.
- моменты инерции сечения кронштейна относительно соответствующих осей.
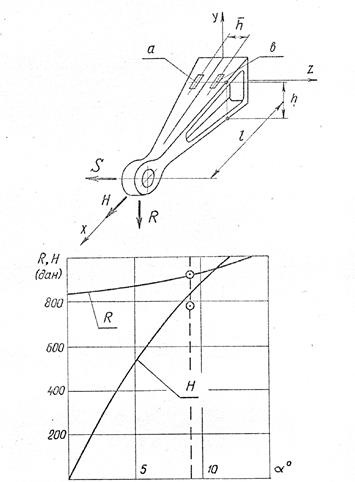
Рис. 1.1.4
Изменяя знаки отдельных уравнений на противоположные и суммируя все четыре уравнения при различных комбинациях знаков, получим
 .
.
Далее по найденным из эксперимента напряжениям , , и можно определить составляющие реакций, действующие на кронштейны:
 ,
,
 ,
,
 .
.
На рис. 1.1.4 изображен график изменения реакций и во втором от заделки стабилизатора кронштейне навески руля в зависимости от угла отклонения . На график теоретического расчета нанесены точки результатов эксперимента. Реакции и получены по 1.1.12 при  . Этот угол отклонения руля соответствует его равновесному состоянию при 67% расчетной маневренной нагрузки, при которой первоначальный угол отклонения уменьшается до
. Этот угол отклонения руля соответствует его равновесному состоянию при 67% расчетной маневренной нагрузки, при которой первоначальный угол отклонения уменьшается до  за счет упругости проводки управления. Эксперимент подтверждает факт существования больших составляющих реакций в реальных конструкциях, а также достаточную надежность метода расчета. Изображенным кружками значениям =778 дан, =908 дан соответствует составляющая реакции в направлении оси шарниров =20 дан.
за счет упругости проводки управления. Эксперимент подтверждает факт существования больших составляющих реакций в реальных конструкциях, а также достаточную надежность метода расчета. Изображенным кружками значениям =778 дан, =908 дан соответствует составляющая реакции в направлении оси шарниров =20 дан.
Шарнирные моменты.
Момент в качалке управления, или шарнирный момент, по традиционной схеме расчета определяется так:
 (1.1.13)
(1.1.13)
Здесь  составляющая погонной воздушной нагрузки, направленная по нормали к плоскости руля;
составляющая погонной воздушной нагрузки, направленная по нормали к плоскости руля;
 расстояния от передней кромки сечения руля до его центра давления и оси шарниров.
расстояния от передней кромки сечения руля до его центра давления и оси шарниров.
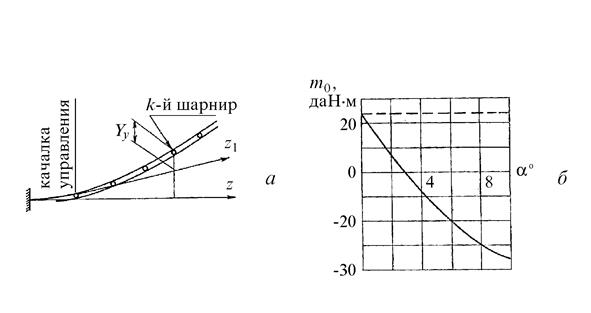
Рис. 1.1.5
Более точное определение шарнирного момента связано с решением геометрически нелинейной задачи, с решением по деформированной расчетной схеме. Действительно, горизонтальные составляющие реакций на перемещениях, связанных с прогибами оси шарниров в вертикальной плоскости, дадут дополнительные моменты относительно оси нулевого шарнира (рис. 1.1.5,а). Если сами являются функциями перемещений оперения, то их произведения на прогибы будут представлять нелинейные зависимости. В первом приближении можно уточнить значение шарнирного момента, зная реакции и прогибы оси шарниров из линейного решения , описанного в данном параграфе.
Полученные таким образом добавки вносят существенные коррективы в  , но окончательно оценить это можно, лишь решив задачу в геометрически нелинейной постановке. На рис. 1.1.5,б сплошной линией изображено изменение момента
, но окончательно оценить это можно, лишь решив задачу в геометрически нелинейной постановке. На рис. 1.1.5,б сплошной линией изображено изменение момента  , вычисленного относительно оси нулевого шарнира оперения Ту-104, в зависимости от угла отклонения руля . Напряженно-деформированное состояние принято известным, определенным по расчетным нагрузкам в соответствии с [2]. Искомый момент вычислялся по формуле:
, вычисленного относительно оси нулевого шарнира оперения Ту-104, в зависимости от угла отклонения руля . Напряженно-деформированное состояние принято известным, определенным по расчетным нагрузкам в соответствии с [2]. Искомый момент вычислялся по формуле:
 (1.1.14)
(1.1.14)
первый член которой представляет собой шарнирный момент, вычисленный по недеформированной расчетной схеме (1.1.13), второй учитывает перемещения точек приложения реакций под действием внешней нагрузки (деформируемость расчетной схемы). Пунктирная линия показывает шарнирный момент, вычисленный по (1.1.13) и не зависящий от . Шарнирный момент с учетом деформаций оперения, изображенный сплошной линией, существенно отличается от момента, определяемого по традиционной схеме.
§ 1.2. Об устойчивости управляющих поверхностей
Исследования напряженно-деформированного cостояния многошарнирного оперения [2] показали, что руль современного самолета при отклонении получает дополнительную нагрузку в своей плоскости, т.к. он вынужден поворачиваться относительно искривленной внешними силами оси шарниров. При этом руль изгибается и в плоскости своей наибольшей жесткости. Нагрузка в срединной плоскости, вызывающая этот изгиб и передающаяся через кронштейны навески, определяется кривизной стабилизатора и углом отклонения руля и достигает больших величин при эксплуатационных и, тем более, при расчетных значениях последних. Это наводит на мысль, что руль, как стержень, имеющий  , от действия сил в срединной плоскости может потерять устойчивость, чем-то напоминающую устойчивость плоской формы изгиба балки [1]. Попытаемся выяснить возможность появления такой потери устойчивости в конструкциях оперений современных самолетов [3].
, от действия сил в срединной плоскости может потерять устойчивость, чем-то напоминающую устойчивость плоской формы изгиба балки [1]. Попытаемся выяснить возможность появления такой потери устойчивости в конструкциях оперений современных самолетов [3].
Пусть под действием изгибающего момента внешней нагрузки  оперение изогнется. Если предположить, что лобовая жесткость и жесткость на кручение стабилизатора велики, то кривизна его в вертикальной плоскости равна
оперение изогнется. Если предположить, что лобовая жесткость и жесткость на кручение стабилизатора велики, то кривизна его в вертикальной плоскости равна  (рис. 1.2.1). Предположим далее, что кривизна оси шарниров также равна
(рис. 1.2.1). Предположим далее, что кривизна оси шарниров также равна  , а их ось совпадает с центром тяжести сечений руля.
, а их ось совпадает с центром тяжести сечений руля.
Согласно [1] и рис. 2.7,б можем записать кривизну руля в плоскостях x z и yz :
 (2.5.1)
(2.5.1)
а также кривизны и относительный угол закручивания в осях y, связанных с сечением руля, которое закрутится на угол . Для записи последних используем таблицу косинусов С.П. Тимошенко [1], полученную для правой системы координат (рис. 1.2.1,в) .
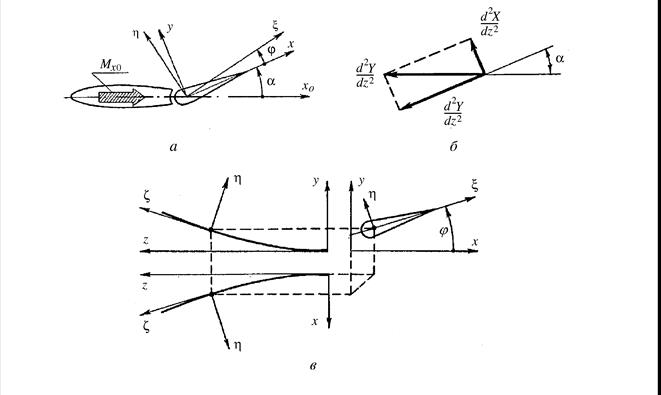
Рис. 1.2.1
Пренебрегая членами, которые С.П. Тимошенко считает малыми, получим:
 (1.2.2)
(1.2.2)
Далее, используя зависимости Кирхгофа Клебша
 (1.2.3)
(1.2.3)
где A =  В =
В =  и С =
и С =  , соответственно минимальная и максимальная жесткости изгиба и жесткость кручения сечения руля, получим моменты внутренних сил относительно осей ,y , в произвольном сечении :
, соответственно минимальная и максимальная жесткости изгиба и жесткость кручения сечения руля, получим моменты внутренних сил относительно осей ,y , в произвольном сечении :

 (1.2.4)
(1.2.4)
С другой стороны, можно записать соответствующие моменты внешних сил через ту же таблицу косинусов:

 (1.2.5)
(1.2.5)
Если предположить, что
 (1.2.6)
(1.2.6)
где  изгибающий момент всей внешней нагрузки, действующей на стабилизатор и руль;
изгибающий момент всей внешней нагрузки, действующей на стабилизатор и руль;
 суммарная изгибная жесткость системы стабилизатор руль в вертикальной плоскости, то согласно (1.2.1 )
суммарная изгибная жесткость системы стабилизатор руль в вертикальной плоскости, то согласно (1.2.1 )
 (1.2.7)
(1.2.7)
Приравнивая (1.2.4) и (1.2.5), принимая во внимание (1.2.7) и заменяя производную по z штрихом, получим:

 (1.2.8)
(1.2.8)

Продифференцируем третье уравнение (1.2.8) по z, считая жесткостные характеристики, а также  постоянными:
постоянными:
 (1.2.9)
(1.2.9)
Выразим X" и Y" из первых двух уравнений (1.2.8) и подставим в (1.2.9):


(1.2.10)
Рассмотрим оперение, у которого загружен только стабилизатор постоянным по длине моментом  .
.
При  т.е. при
т.е. при  решением уравнения (1.2.10) будет:
решением уравнения (1.2.10) будет:

где

Если качалка управления расположена в сечении z = 0 , то краевые условия примут вид:
1) z = 0 → = 0 ; 2) z = l → ' = 0 .
Из первого найдем  , из второго
, из второго 
тогда
 (1.2.11)
(1.2.11)
Это выражение превращается в бесконечность, если cos kl = 0, т.е. с увеличением  значение увеличивается, асимптотически приближаясь к вертикальной прямой
значение увеличивается, асимптотически приближаясь к вертикальной прямой  (рис. 1.2.2,а), соответствующей решению однородного дифференциального уравнения, полученного из (1.2.10). Каждому углу отклонения руля будет соответствовать свое значение
(рис. 1.2.2,а), соответствующей решению однородного дифференциального уравнения, полученного из (1.2.10). Каждому углу отклонения руля будет соответствовать свое значение  :
:
 . (1.2.12)
. (1.2.12)
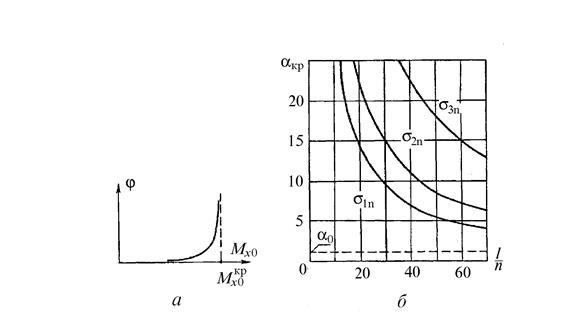
Рис. 1.2.2
При таком значении  произойдет потеря устойчивости оперения от действия сил только в его срединной плоскости. Рассматривая решение лишь однородного уравнения (1.2.10), мы как бы отбрасываем влияние поперечных реакций взаимодействия руля и стабилизатора на критическое значение изгибающего момента.
произойдет потеря устойчивости оперения от действия сил только в его срединной плоскости. Рассматривая решение лишь однородного уравнения (1.2.10), мы как бы отбрасываем влияние поперечных реакций взаимодействия руля и стабилизатора на критическое значение изгибающего момента.
Рассмотрим возможность появления потери устойчивости оперения при некоторых предельных эксплуатационных напряжениях в поясе лонжерона стабилизатора:
 (1.2.13)
(1.2.13)
Здесь  предельное напряжение; h высота лонжерона стабилизатора.
предельное напряжение; h высота лонжерона стабилизатора.
Подставляя (1.2.12) в (1.2.13), получим
 (1.2.14)
(1.2.14)
Рассматривая (1.2.14) как равенство, получим значение критического угла отклонения руля, при котором потеря устойчивости оперения наступает одновременно с появлением предельных напряжений в лонжероне.
Построим зависимость  от h / l при различных , в том числе и при напряжении, соответствующем пределу пропорциональности материала. При построении кривых (рис. 1.2.2,б) использованы следующие исходные данные:
от h / l при различных , в том числе и при напряжении, соответствующем пределу пропорциональности материала. При построении кривых (рис. 1.2.2,б) использованы следующие исходные данные:
B/A = 40, A = C, E = 7,2 104 МПа ,  = 300 МПа ,
= 300 МПа ,
 = 200 МПа,
= 200 МПа,  = 100 МПа .
= 100 МПа .
Расчеты самолета на прочность ведутся на напряжения временного сопротивления материала, поэтому представляет интерес и тот случай, когда потеря устойчивости оперения происходит при нагрузках больше эксплуатационных.
Все кривые асимптотически стремятся к значению  Из анализа выражения (1.2.14) видно, что во всех практически интересных случаях подкоренное выражение близко к единице и
Из анализа выражения (1.2.14) видно, что во всех практически интересных случаях подкоренное выражение близко к единице и
Случаи  при решении уравнения (1.2.10) рассматривать не будем как менее интересные.
при решении уравнения (1.2.10) рассматривать не будем как менее интересные.
Таким образом, при определенном соотношении жесткостей руля и стабилизатора под действием внешней нагрузки может произойти потеря устойчивости руля, если он отклонен на некоторый угол, который больше критического.
Полученное решение следует рассматривать лишь как введение в вопросы устойчивости оперения. Эксперименты на простейших моделях показывают, что конструкция типа оперения с рулем имеет еще одно равновесное состояние, не смежное с первоначальным, при больших прогибах оперения. Явление перехода от одного равновесного состояния к другому сопровождается щелчком, "прощелкиванием" и получило название – катастрофическое изменение формы оперения. При исследовании этого явления необходимо учитывать конечность прогибов, а значит, решать геометрически нелинейную задачу.
Дата добавления: 2021-03-18; просмотров: 198; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!