Нисходящее тестирование интеграции
В данном подходе модули объединяются движением сверху вниз по управляющей иерархии, начиная от главного управляющего модуля. Подчиненные модули добавляются в структуру или в результате поиска в глубину, или в результате поиска в ширину.
Рассмотрим пример (рис. 8.4). Интеграция поиском в глубину будет подключать все модули, находящиеся на главном управляющем пути структуры (по вертикали). Выбор главного управляющего пути отчасти произволен и зависит от характеристик, определяемых приложением. Например, при выборе левого пути прежде всего будут подключены модули Ml, М2, М5. Следующим подключается модуль М8 или Мб (если это необходимо для правильного функционирования М2). Затем строится центральный или правый управляющий путь.
При интеграции поиском в ширину структура последовательно проходится по уровням-горизонталям. На каждом уровне подключаются модули, непосредственно подчиненные управляющему модулю — начальнику. В этом случае прежде всего подключаются модули М2, М3, М4. На следующем уровне — модули М5, Мб и т. д.
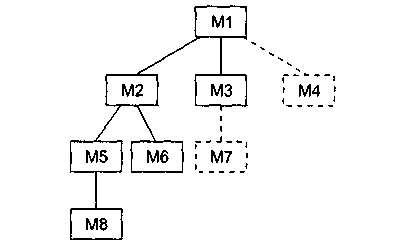
Рис. 8.4. Нисходящая интеграция системы
Опишем возможные шаги процесса нисходящей интеграции.
1. Главный управляющий модуль (находится на вершине иерархии) используется как тестовый драйвер. Все непосредственно подчиненные ему модули временно замещаются заглушками.
2. Одна из заглушек заменяется реальным модулем. Модуль выбирается поиском в ширину или в глубину.
|
|
|
3. После подключения каждого модуля (и установки на нем заглушек) проводится набор тестов, проверяющих полученную структуру.
4. Если в модуле-драйвере уже нет заглушек, производится смена модуля-драйвера (поиском в ширину или в глубину).
5. Выполняется возврат на шаг 2 (до тех пор, пока не будет построена целая структура).
Достоинство нисходящей интеграции: ошибки в главной, управляющей части системы выявляются в первую очередь.
Недостаток: трудности в ситуациях, когда для полного тестирования на верхних уровнях нужны результаты обработки с нижних уровней иерархии.
Существуют 3 возможности борьбы с этим недостатком:
1) откладывать некоторые тесты до замещения заглушек модулями;
2) разрабатывать заглушки, частично выполняющие функции модулей;
3) подключать модули движением снизу вверх.
Первая возможность вызывает сложности в оценке результатов тестирования.
Для реализации второй возможности выбирается одна из следующих категорий заглушек:
· заглушка А — отображает трассируемое сообщение;
· заглушка В — отображает проходящий параметр;
· заглушка С — возвращает величину из таблицы;
· заглушка D — выполняет табличный поиск по ключу (входному параметру) и возвращает связанный с ним выходной параметр.
|
|
|
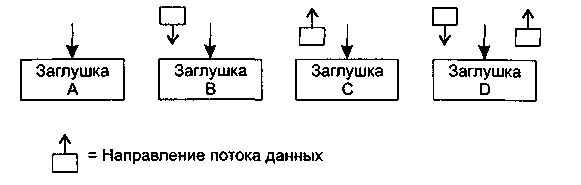
Рис. 8.5. Категории заглушек
Категории заглушек представлены на рис. 8.5.
Очевидно, что заглушка А наиболее проста, а заглушка D наиболее сложна в реализации.
Этот подход работоспособен, но может привести к существенным затратам, так как заглушки становятся все более сложными.
Третью возможность обсудим отдельно.
Восходящее тестирование интеграции
При восходящем тестировании интеграции сборка и тестирование системы начинаются с модулей-атомов, располагаемых на нижних уровнях иерархии. Модули подключаются движением снизу вверх. Подчиненные модули всегда доступны, и нет необходимости в заглушках.
Рассмотрим шаги методики восходящей интеграции.
1. Модули нижнего уровня объединяются в кластеры (группы, блоки), выполняющие определенную программную подфункцию.
2. Для координации вводов-выводов тестового варианта пишется драйвер, управляющий тестированием кластеров.
3. Тестируется кластер.
4. Драйверы удаляются, а кластеры объединяются в структуру движением вверх. Пример восходящей интеграции системы приведен на рис. 8.6.
Модули объединяются в кластеры 1,2,3. Каждый кластер тестируется драйвером. Модули в кластерах 1 и 2 подчинены модулю Ма, поэтому драйверы D1 и D2 удаляются и кластеры подключают прямо к Ма. Аналогично драйвер D3 удаляется перед подключением кластера 3 к модулю Mb. В последнюю очередь к модулю Мс подключаются модули Ма и Mb.
|
|
|
Рассмотрим различные типы драйверов:
· драйвер А — вызывает подчиненный модуль;
· драйвер В — посылает элемент данных (параметр) из внутренней таблицы;
· драйвер С —отображает параметр из подчиненного модуля;
· драйвер D — является комбинацией драйверов В и С.
Очевидно, что драйвер А наиболее прост, а драйвер D наиболее сложен в реализации. Различные типы драйверов представлены на рис. 8.7.
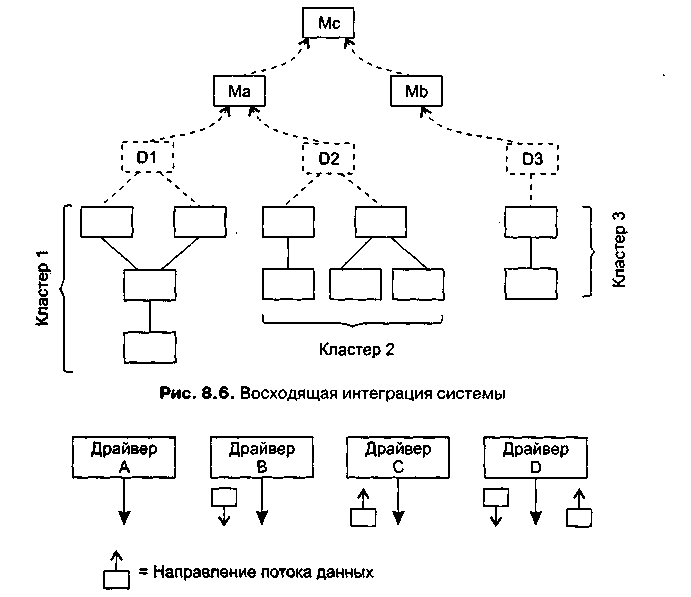
Рис. 8.7. Различные типы драйверов
По мере продвижения интеграции вверх необходимость в выделении драйверов уменьшается. Как правило, в двухуровневой структуре драйверы не нужны.
Дата добавления: 2021-03-18; просмотров: 95; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!