ПОСТРОЕНИЕ ПРЕДВАРИТЕЛЬНЫХ ВАРИАНТОВ ФУНКЦИОНАЛЬНОЙ И СТРУКТУРНОЙ СХЕМ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
ОБОСНОВАНИЕ ТЕХНИЧЕСКОГО ЗАДАНИЯ НА ПРОЕКТИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
Разработать систему управления электроприводом механизма извлекателя оправок трубопрокатного агрегата с учетом его конструктивных особенностей и требований технологического процесса.
Система автоматического управления электроприводом должна обеспечивать постоянную скорость извлечения при постоянстве момента.
По тепловому расчету был выбран двигатель 4П-355-45-200-У3. Для питания двигателя используется тиристорный преобразователь типа КТЭУ с номинальным током 800 А, силовая цепь преобразователя выполнена мостовой схеме.
Показатели качества определяют соответствие СУЭП своему назначению, а ограничения - надежность электропривода при эксплуатации.
Технологическую цель СУЭП можно охарактеризовать как поддержание постоянства заданной величины. В соответствии с данной целью СУЭП определяющими показателями качества являются время точность стабилизации и диапазон регулирования.
Управляющим воздействием является задание на скорость вращения двигателя.
Определяющими возмущающими воздействиями для данного привода являются изменение момента нагрузки и напряжения сети, погрешность измерения и помехи в каналах управления.
Исходя из вышеперечисленных требований, для данного класса СУЭП приемлемым является аналоговый способ задания скорости.
|
|
|
АНАЛИЗ ХАРАКТЕРИСТИК СИЛОВОЙ ЧАСТИ КАК ОБЪЕКТА УПРАВЛЕНИЯ
В составе автоматизированного электропривода объектом управления является силовая часть объекта управления, которую составляют преобразователь, двигатель и механизм. Связь между двигателем и механизмом принимается жесткой.
Номинальная мощность двигателя - PN = 200 кВт.
Номинальное напряжение - UN = 440 В.
Номинальный ток якоря - IN = 524 А.
Момент инерции привода - J = 44,9 кг·м2.
Номинальная угловая скорость двигателя - ΩN = 32,99 рад/с.
Номинальный момент - MN = 6063 Нм.
Активное сопротивление якорной цепи двигателя
яд = kt(Rя + Rдп + Rко),
где kt = 1,24 - коэффициент, учитывающий изменение сопротивления при нагревании, Rя = 0,0389 Ом - сопротивление якоря двигателя; Rдп = 0,0116 Ом - сопротивление дополнительных полюсов; Rко = 0,0168 Ом - сопротивление компенсационной обмотки .
Rяд = 1,24(0,0389 + 0,0116 + 0,0168) = 0,0835 Ом.
Фиктивное активное сопротивление преобразователя обусловленное коммутацией тиристоров
,
где kγ - коэффициент, учитывающий особенности однофазных преобразователей и параллельного соединения простых схем, kγ = 1,0 [2, табл. 3]; коэффициент kп = 2 по [2, табл. 3]; Lп = 0,000064 Гн - индуктивность фазы реактора, p = 6 - пульсность преобразователя; f = 50 Гц - частота сети.
|
|
|
Ом.
Эквивалентное сопротивление якорной цепи
RЭ = Rяд + Rγ + Rср + kп·Rп,
где Rср = 0,0072 Ом - активное сопротивление сглаживающего дросселя; Rп = 0,0021 Ом - тока активное сопротивление обмотки реактора.
Rэ = 0,0835 + 0,0096 + 0,0072 + 2·0,0021 = 0,104 Ом.
Эквивалентная индуктивность якорной цепи
Lэ = Lяд + Lср + kп·Lп,
где Lад = 0,00127 Гн - индуктивность цепи якоря; Lср = 0,005 Гн - индуктивность сглаживающего дросселя.Э = 0,00127 + 0,005 + 2·0,000064 = 0,00627 Гн.
Электромагнитная постоянная времени якорной цепи
с.
ЭДС двигателя номинальная
EДN = UN - INRяд = 440 - 524·0,0835 = 396,3 В.
Электромеханическая постоянная времени привода
,
где - произведение постоянной двигателя на ее магнитный поток.
.
Коэффициент усиления вентильного преобразователя
,
где Ed0 = 513 В - напряжение преобразователя при максимальном напряжении управления; Uоп.m = 15 В - амплитудное значение опорного напряжения.
.
Определим базисные величины.
Uб = EдN = 396,3 В,
Iб = IN = 524 А,
Ωб = ΩN = 32,99 рад/с,б = MN = 6063 Нм,
Ом.
Uб.р = 7 В.
Параметры главной цепи в системе относительных единиц
,
Механическая постоянная времени
с.
Коэффициент усиления преобразователя в системе относительных величин
|
|
|
.
Математическая модель силовой части вентильного электропривода постоянного тока в относительных единицах при общепринятых допущениях описывается следующими уравнениями
п = eп(uу);
;
eд = φ·ω;
m = φ·iя;
.
АНАЛИЗ ХАРАКТЕРИСТИК ДАТЧИКОВ ИНФОРМАЦИИ
В системе управления электропривода в качестве информационных устройств используется три вида датчиков: скорости тока и напряжения.
В качестве аналогового датчика скорости применяем тахогенератор постоянного тока, у которого на выходе имеется делитель напряжения (рис. 4.1). В основе датчика тока лежит шунт, а датчика напряжения добавочное сопротивление.
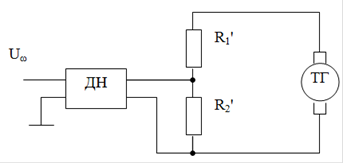
Рис. 4.1. Принципиальная схема датчика скорости.
Коэффициенты передачи датчика тока, скорости и ЭДС двигателя
kдт = 1;
В/А;дс = 1;
Вс/рад.
kдэ = 1;
.
ПОСТРОЕНИЕ ПРЕДВАРИТЕЛЬНЫХ ВАРИАНТОВ ФУНКЦИОНАЛЬНОЙ И СТРУКТУРНОЙ СХЕМ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
В настоящее время в электроприводе при создании системы автоматического управления нашел применение принцип подчиненного регулирования с последовательной коррекцией.
Системы подчиненного регулирования выполняются по определенной многоконтурной структуре (см. рис. 5.1).
|
|
|

Рис. 5.1. Структурная схема системы подчиненного регулирования
Сущность построения таких систем заключается в следующем:
1. объект управления представляется в виде цепочки последовательно соединенных звеньев с передаточными функциями W01(p), W02(p), …, W0i-1(p), W0i(p), выходными параметрами которых являются контролируемые координаты объекта: напряжение, ток, скорость и т.д.
2. Количество регуляторов с передаточными функциями Wр1(p), Wр2(p), …, Wрi(р) в СПР устанавливается равным количеству регулируемых величин. Все регуляторы соединяются последовательно, так что выход одного является входом другого. Кроме того на вход каждого регулятора подается отрицательная обратная связь по той переменной, которая регулируется данным регулятором. В результате этого в системе образуются как бы вложенные друг в друга контуры регулирования. Таким образом, число контуров регулирования равно количеству регулируемых координат объекта.
3. Каждый внутренний контур управления подчинен следующему по порядку внешнему контуру, т.е. выходной сигнал регулятора любого внешнего контура является задающим для последующего, заключенного в него, контура. В итоге все внутренние контуры работают как подчиненные задаче регулирования выходной координаты системы.
4. Ограничение любой координаты достигается ограничением ее задания, т.е. выходного сигнала регулятора, внешнего по отношению к рассматриваемому контуру.
5. На выходе регулирующей части системы управления устанавливается фильтр. Постоянная времени Тμ этого фильтра является основным параметром системы авторегулирования и определяет важнейшие свойства системы.
6. Синтез регуляторов СПР осуществляется методом последовательной коррекции (начиная с внутреннего контура и кончая внешним). Практически при выборе передаточной функции регулятора Wpi(p) i-го контура стремятся решить две основные задачи:
· обеспечить за счет действия регулятора компенсацию наиболее существенных инерционностей объекта, входящих в данных контур, и тем самым улучшить быстродействие системы;
· обеспечить определенный порядок астатизма данного контура за счет введения в регулятор интегрирующего звена.
Передаточная функция регулятора i-го контура будет иметь вид:

Настройка системы производится путем последовательной оптимизации контуров регулирования. Каждый контур оптимизируется по модульному или симметричному оптимумам, в основе которых лежит обеспечение вполне определенных показателей по выполнению, колебательности и точности системы автоматического управления, т.е. получение технически оптимального переходного процесса.
Системы подчиненного регулирования имеют следующие достоинства:
1. Простота расчета регуляторов каждого контура при настройке по тому или иному оптимуму.
2. Высокие статические и динамические показатели, обеспечиваемые настройкой контуров регулирования по модульному или симметричному оптимумам.
3. Простота ограничения регулируемых координат.
4. Унификация оборудования, обусловленная особенностями регуляторов СПР и наличием унифицированных блочных систем регулирования, специально выпускаемых для СПР.
5. Простота настройки.
Основной недостаток - некоторый проигрыш по быстродействию.
На рис. 5.2 представлена структурная схема двухконтурной системы подчиненного регулирования электропривода постоянного тока.

Рис. 5.2. Структурная схема двухконтурной системы подчиненного регулирования электропривода постоянного тока.
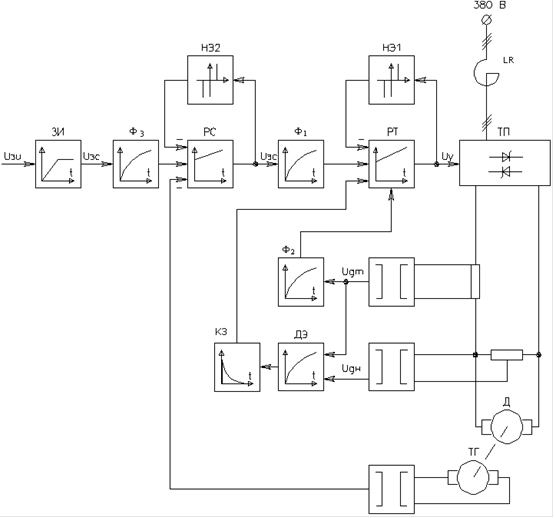

Рис. 5.3. Функциональная схема САР скорости.
В соответствие с требованиями к электроприводу принимаем двухконтурную САР скорости с внутренним контуром регулирования тока якоря. Выбираем двухкратно интегрирующую САР скорости, поскольку астатизм системы по моменту сопротивления требуется. Контур тока якоря настроен на модульный оптимум, а скорости на симметричный. Поэтому в системе применяется ПИ-регулятор тока и ПИ-регулятор скорости. Ускорение и замедление привода обеспечивается путем формирования линейно изменяющегося сигнала задания на скорость задатчиком интенсивности. Функциональная схема САР скорости представлена на рис. 5.3.
6.
ВЫБОР МЕТОДА СИНТЕЗА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ РЕГУЛЯТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
Наибольшее применение при проектировании систем управления электроприводов получил метод, основанный на использовании в качестве критериев качества системы управления интегральной квадратичной ошибки. Сочетание аналитического метода с принципом подчиненного регулирования с последовательной коррекцией позволяет унифицировать не только методы расчета, но и средства автоматического управления.
Синтез регуляторов системы управлении электропривода проводится на основе критериев качества. Рассматривается система регулирования при ступенчатом изменении воздействия. Необходимый астатизм системы обеспечивается введением нужного количества интегрирующих звеньев. В качестве основной составляющей критерия качества рассматривается ошибка регулирования и ставится задача ее минимизации. В целях получения нужного качества учитывают не только величину, но и характер изменения ошибки, для чего в критерий качества вводят значения производных выходной координаты системы.
Дата добавления: 2021-03-18; просмотров: 60; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!