Рассмотрим некоторые из этих измерительных преобразователей.
Государственное профессиональное
Образовательное учреждение
«Енакиевский металлургический техникум»
ПМ 01. МДК. 01.02 Методы осуществления стандартных и сертификационных испытаний, метрологических поверок средств измерений
Раздел 2. Технологические измерения параметров процесса
Тема 1 Государственная система промышленных приборов и средств автоматизации
Тема 1.3
Лекция 20
«Механические, пневматические, оптические первичные преобразователи»
План.
Механические первичные преобразователи.
Пневматические первичные преобразователи.
Оптические первичные преобразователи.
4. Контрольные вопросы.
5. Вопросы для самостоятельного изучения.
6. Литература. Информационные ресурсы.
Преподаватель ____________________ Г.В. Лунина
1. Выходной величиной механических измерительных преобразователей является механическое перемещение /линейное или угловое/ или частота механического перемещения. Они широко используются в различных приборах непосредственно или в качестве промежуточного преобразовательного элемента электрических и пневматических ПИП.
Механические ПИП можно разделить на:
1. упругие,
2. частотные,
3. инерционные,
4. датчики теплового расширения.
Выходная величина упругих преобразователей формируется в процессе деформации тела самого преобразователя. Эта деформация воспринимается или непосредственно наблюдателем /как это имеет место в механических приборах/, или последующим измерительным преобразователем с электрической выходной величиной и входной в виде механического перемещения /резистор/, механического напряжения /тензорезистор/ или частоты /вибрационные/.
|
|
|
Входной величиной упругих механических преобразователей может быть сосредоточенная сила, крутящий момент /т.е. пара сил/, давление газа или жидкости.
Для восприятия больших усилий /свыше 10 кН/ используются, как правило, сплошные стержни, для меньших усилий /1-10 кН/- полые тонкостенные стержни ; для малых усилий- плоские пружины .
Наиболее употребительные упругие преобразователи с входной величиной в виде крутящего момента М и выходной- в виде углового перемещения.
Особенно большим разнообразием отличаются упругие измерительные преобразователи, применяемые для измерения давления. Это плоские гофрированные мембраны, мембранные пробки, использующие собственную жесткость или опирающиеся на внешнюю плоскую пружину.
Для получения больших линейных выходных перемещений используются сильфоны или трубки Бурдона, а для получения больших угловых перемещений- спиральные и винтовые трубки с внутренним давлением. Металлический сильфон представляет собой гофрированную трубку из упругого эластичного материала, один конец которой заканчивается фланцем (с этой стороны подводится преобразуемое давление), а другой — плоским дном. Сильфоны отличаются малой жесткостью и имеют низкую стабильность нуля. Поэтому они используются чаще не как чувствительные элементы, а как нежесткие разделители сред в сочетании с надежными и точными упругими элементами более высокой жесткости.
|
|
|
В качестве упругих преобразователей давления используются обычно жесткие мембраны, цилиндрические и полусферические оболочки и другие упругие элементы. Наиболее распространенным упругим преобразователем давления является мембрана. Она может использоваться как преобразователь давления в деформацию и как преобразователь давления в перемещение. В последнем случае выходной величиной обычно бывает перемещение центра мембраны.
Из упругих преобразователей сил наибольшее распространение получили стержни. Это объясняется простотой их изготовления, возможностью достижения высокой точности геометрических размеров. Стержневые упругие элементы обладают малой чувствительностью и применяются для преобразования больших усилий (свыше 10 кН). Для повышения чувствительности стержневые элементы выполняются полыми. Следует, однако, отметить, что уменьшение толщины стенки таких элементов ограничено технологическими возможностями и эксплуатационными особенностями, а пределы преобразуемых усилий таких преобразовательных элементов обычно не ниже 0,5 кН.
|
|
|
Общим недостатком стержневых упругих элементов является малое значение выходных перемещений, из-за чего они могут применяться лишь в тензорезистивных датчиках. Другим недостатком стержневых упругих элементов является неидентичность их преобразовательных характеристик при работе на сжатие и растяжение.
Определенные преимущества перед стержневыми имеют кольцевые упругие элементы. Они обладают достаточно большими выходными перемещениями, что дает возможность их использования в емкостных, индуктивных и других датчиках. Кольцевые упругие элементы более чувствительны и могут быть применены для преобразований усилий от нескольких десятков ньютон до единиц килоньютон.
Наиболее чувствительными к воздействию силы являются балочные упругие элементы. Они технологичны, деформации сжатия и растяжения в них совершенно идентичны. Недостатком балочных упругих элементов является необходимость жесткой заделки одного конца балки, трудности фиксации точки и направления приложения силы. Поэтому они применяются только для преобразований малых усилий (до 50 Н), когда другие упругие элементы не обеспечивают необходимой чувствительности.
|
|
|
Основным недостатком упругих преобразователей является наличие погрешности, обусловленной гистерезисом материала. Для преобразователей, выполненных даже из самых лучших сортов упругих материалов, погрешность составляет 0,2¸0,05%. Поскольку возникновение заметных пластических деформаций измерительных упругих элементов недопустимо, рабочие напряжения s
в них всегда должны оставаться меньше sдоп.
Частотные датчики, очень часто – это вибрирующая струна, представляющая собой металлическую нить, натянутая между двумя точками исследуемой конструкции, на расстоянии порядка десятка сантиметров, частота колебаний которой зависит от натяжения и меняется при перемещении точек крепления.
Источником сигнала измерительной информации о значениях измеряемых параметров вибрации является виброизмерительный преобразователь (вибропреобразователь). Современные вибропреобразователи, в основном, построены на принципах электрических измерений не электрических величин (сигналов), когда механические колебания преобразуются в электрические. Виброизмерительные преобразователи классифицируются по ряду независимых признаков:
· по значению - измерительные преобразователи могут предназначаться для измерения различных параметров вибрации. В зависимости от измеряемого параметра вибрации вибропреобразователи могут называть: акселерометрами - для измерения ускорения и велосиметрами - для измерения скорости.
· по связи (взаимодействию) воспринимающей (чувствительной) части с объектом измерения различают контактные и бесконтактные преобразователи. Применение контактных или бесконтактных преобразователей зависит от размеров и массы вибрирующих изделий. Если размеры и массы изделий соизмеримы или меньше размеров и масс контактных преобразователей, то необходимо применять бесконтактные измерительные преобразователи.
· по принципу измерения относительно системы отсчета измерительные преобразователи могут быть основаны: на определении координат отдельных точек изделия относительно неподвижной системы отсчета, с которой ведутся наблюдения - кинематический принцип: на создании искусственной неподвижной системы отсчета в виде инерционного элемента, соединяемого с вибрирующим изделием через упругий подвес (мягкую пружину) - динамический принцип. При осуществлении динамического принципа измерения параметров вибрации изделия, производимое в условиях установившегося процесса, относительно инерционного элемента будет абсолютным.
Преобразователи построенные по динамическому принципу часто называют инерционными.
· по принципу преобразования механических колебаний в другие виды колебаний различают активные и пассивные измерительные преобразователи. В активных измерительных преобразователях выходной сигнал получается за счет входной механической энергии и постоянного источника энергии. К активным преобразователям относятся фотоэлектрические, гамма-квантовые, емкостные и др. В пассивных измерительных преобразователях выходной сигнал получается только за счет входной механической энергии. К пассивным преобразователям относятся: пьезоэлектрические, электретные и др.
· по роду измеряемых компонентов вибрации различают преобразователи для измерения линейных компонентов колебаний (однокомпонентные, двухкомпонентные, трехкомпонентные), а также для измерения угловых компонентов.
· по направлению приложения силы при механических воздействиях различают измерительные преобразователи направленного и ненаправленного действия. В инерционных преобразователях ненаправленного действия упругий подвес обеспечивает сохранение положения и ориентации в абсолютном пространстве. По этому они могут выдавать все шесть компонентов вибрации. В преобразователях направленного действия обеспечивается измерение только одного линейного или углового компонента вибрации.
· по физическому явлению доложенному в основу метода измерения параметров механических колебаний, измерительные преобразователи можно объединить в следующие основные группы: механические, акустические (ультразвуковые), электрические, электромагнитные (радиотехнические), оптические (световые) и радиационные.
Рассмотрим некоторые из этих измерительных преобразователей.
Реостатный преобразователь – это прецизионный реостат, движок которого перемещается под действием измеряемой величины. Входной величиной является угловое линейное перемещение движка, выходной – изменение его сопротивления.
Устройство преобразователя показано на рис. 1. Он состоит из каркаса 1, на который намотан провод 2, изготовленный из материала с высоким удельным сопротивлением (манганин, константан, фехраль или платино-иридиевый сплав), и токосъемного движка 3, укрепленного на оси 4. Движок касается провода 2. Для обеспечение электрического контакта в месте касания обмотка зачищается от изоляции. В данной конструкции контакт с подвижным движком осуществляется с помощью неподвижного токосъемного кольца 5.

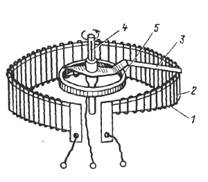

а) б)
Рисунок 1. Реостатный преобразователь: а) каркасного типа; б) реохордного типа.
Тензорезисторный преобразователь (тензорезистор) – это проводник, изменяющий свое сопротивление при деформации сжатия-растяжения.
Бывают проволочные (фольговые, проволочные, пленочные) и полупроводниковые.

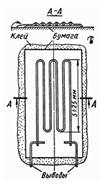
а) б) в)
Рисунок 2. Тензорезисторы а) фольговый; б) проволочный; в) полупроводниковый.
Фольговые тензорезисторы представляют собой тонкую лаковую пленку, на которую нанесена фольговая тензочувствительная решетка из константана толщиной 4-12 мкм. Решетка покрыта лаком. Данный вид тензорезистора нечувствителен к поперечной деформации вследствие малого сопротивления перемычек соединяющих тензочувствительные элементы.
Проволочный имеет аналогичное устройство, но его решетка выполнена из константановой проволоки толщиной 20-50 мкм. Характеристики их хуже, чем у фольговых.
Полупроводниковые тензорезисторы - это пластинка из монокристалла кремния или германия длиной 5-10 мм, шириной 0,2-0,8 мм с приваренными к торцам выводными проводниками.
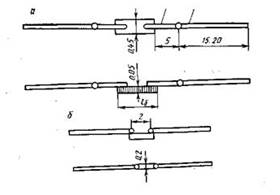
Емкостный измерительный преобразователь представляет собой конденсатор, в котором изменение расстояния между пластинами, площади перекрытия пластин или диэлектрической проницаемости диэлектрика, помещенного между пластинами, преобразуется в изменение емкости.
Емкостные измерительные преобразователи можно подразделить на следующие группы в зависимости от выбранного классификационного признака:
1. По назначению емкостного датчика: датчики линейного и углового перемещения, датчики уровня и линейных размеров, датчики температуры, датчики усилий;
2. По конструктивному исполнению на датчики: с плоскопараллельными пластинами конденсатора, с цилиндрической формой конденсатора, с наличием диэлектрика между пластинами, без диэлектрика;
3. По виду изменяемого параметра конденсатора на датчики: с изменяемой площадью перекрытия пластин, с изменяемым зазором между пластинами, с изменяемой диэлектрической проницаемостью.
Емкостные измерительные преобразователи работают на переменном токе. Принцип их действия основан на изменении емкости конденсатора под воздействием контролируемой координаты управляемого объекта
Рисунок 3. Емкостные измерительные преобразователи разных типов. а) измерение уровня с помощью емкостного преобразователя; б) измерение уровня проводящей жидкости; в) емкостной преобразователь для измерения толщины ленты из диэлектрика; г) емкостной преобразователь с переменной площадью пластин, используемых для измерения угла поворота вала; д) дифференциальный емкостной преобразователь.
Индуктивные преобразователи
Действие этих приборов основано па принципе преобразования линейных перемещений измерительного наконечника в изменения напряжения индуктивным методом.
При перемещении измерительного стержня 1 (рис. 4) преобразователя перемещается якорь 2 относительно катушек 3 сердечника 4, что вызывает изменение напряжения на выходе трансформатора 6. Катушки и две половины первичной обмотки входного трансформатора образуют балансный мост, питание которого осуществляется от генератора частоты 5. Полученное изменение напряжения усиливается электронным блоком 7, на выходе которого подключается записывающий 9 или показывающий 8 приборы.
Индуктивные преобразователи разделяются на простые и дифференциальные. Простые индуктивные преобразователи имеют одну катушку, а дифференциальные—две катушки, включенные в измерительную схему, т. е. имеются два магнитопровода с общим якорем.

Рисунок 4. Принципиальная схема работы индуктивного преобразователя.
Дата добавления: 2021-03-18; просмотров: 200; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!