Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Учебник для вузов. Ленинград: Энергоатомиздат, 1983. - 315 с.
Государственное профессиональное
Образовательное учреждение
«Енакиевский металлургический техникум»
ПМ 01. МДК. 01.02 Методы осуществления стандартных и сертификационных испытаний, метрологических поверок средств измерений
Раздел 2. Технологические измерения параметров процесса
Тема 1 Государственная система промышленных приборов и средств автоматизации
Тема 1.5
Лекция 22
«Ферродинамические, механоэлектрические и магнитные системы передачи информации»
План.
Ферродинамические системы передачи информации
Механоэлектрические системы передачи информации
Магнитные системы передачи информации.
4. Контрольные вопросы.
5. Вопросы для самостоятельного изучения.
6. Литература. Информационные ресурсы.
Преподаватель ____________________ Г.В. Лунина
1. Ферродинамическая система дистанционной передачи измерительной информации.
Ферродинамические преобразователи применяются для преобразования угловых перемещений в унифицированный выходной электрический сигнал. Они могут быть использованы в качестве передающих в том случае, если значение измеряемой величины может быть преобразовано в пропорциональное угловое перемещение подвижного элемента преобразователя — рамки. В то же время используемые в приборах теплотехнического контроля чувствительные элементы преобразуют измеряемую величину либо в линейное перемещение, либо в усилие (за исключением кольцевого дифманометра, преобразующего перепад давления в угол поворота подвижного кольца). Поэтому использование ферродинамических преобразователей обычно сопряжено с необходимостью использования кинематических устройств, преобразующих линейное перемещение чувствительного элемента в угловое. В силу этого ферродинамические преобразователи не нашли широкого применения в качестве передающих. Наибольшее распространение они получили в металлургии как средства измерения, которые одновременно могут выполнять простейшие арифметические операции в измерительных устройствах, использующих косвенный метод измерения (например, в тепломерах). Однако в связи с широким применением вычислительных машин и микропроцессоров все вычислительные операции оказывается целесообразным выполнять с помощью более точных ЭВМ.
|
|
|
Принцип действия ферродинамических преобразователей основан на зависимости взаимной индуктивности между обмоткой возбуждения и рамкой от угла поворота последней, что приводит к зависимости наводимой в ней ЭДС от угла поворота.
Ферродинамическая система дистанционной передачи информации (рис. 1) построена на принципе авто компенсатора с использованием двух ферродинамических преобразователей ПФ-1 и ПФ-2, выходные сигналы которых  и
и  направлены навстречу друг другу. Поворотная рамка ПФ-1 связана с чувствительным элементом (ЧЭ) первичного измерительного преобразователя (ПИП), а ПФ-2 выполняет роль компенсирующего устройства вторичного прибора типа КСФ.
направлены навстречу друг другу. Поворотная рамка ПФ-1 связана с чувствительным элементом (ЧЭ) первичного измерительного преобразователя (ПИП), а ПФ-2 выполняет роль компенсирующего устройства вторичного прибора типа КСФ.
|
|
|

Рисунок 1 – Упрощенная схема системы дистанционной передачи измерительной информации на базе ферродинамических преобразователей.
В случае рассогласования углов поворота рамок ПФ-1 и ПФ-2 сигнал разбалланса  усиливается в ЭУ и поступает на РД. Реверсивный двигатель уравновешивает систему, поворачивая измерительную рамку компенсирующего преобразователя ПФ-2 до достижения нового состояния равновесия :
усиливается в ЭУ и поступает на РД. Реверсивный двигатель уравновешивает систему, поворачивая измерительную рамку компенсирующего преобразователя ПФ-2 до достижения нового состояния равновесия :  ,
,  . Одновременно РД перемещает стрелку отсчетного устройства и перо самописца.
. Одновременно РД перемещает стрелку отсчетного устройства и перо самописца.
Данная система имеет то же достоинство, что и дифференциально-трансформаторная система: отсутствие механических контактов в первичном и передающем преобразователях.
Недостатки — довольно высокая температурная погрешность и невозможность работы в среде, вредно влияющей на элементы электронной схемы усилителей (находящиеся в корпусе первичного преобразователя). К недостаткам следует также отнести большое влияние на погрешность первичного преобразователя погрешностей чувствительного элемента и индикатора магнитных потоков, так как они не охвачены обратной связью. Это ограничивает возможность создания точных приборов с такими преобразователями. Преобразователи этого типа имеют класс 1 и 1,5.
|
|
|
2. Электромеханические системы дистанционной передачи (рис. 2), включают в себя:
· - индукционный датчик ИД, который вырабатывает электрический сигнал, характеризующий угловую ориентацию картушки Кт;
· - приемное устройство ПУ этого сигнала, в качестве которого могут использоваться сельсины или вращающиеся трансформаторы;
· - усилитель У, усиливающий сигнал рассогласования по напряжению, и мощности;
· - исполнительный двигатель Д, вращающий ротор ПУ вслед за поворотом картушки Кт;
· -сельсин датчик СД, транслирующий информацию на репитеры;
· - корректор К для введения поправок в показания прибора.
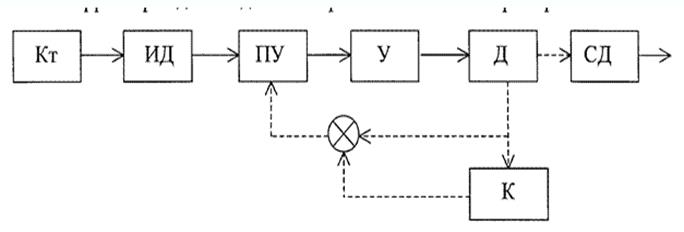
Рисунок 2. Структурная схема механоэлектрического передающего преобразователя.
Механоэлектрические передающие преобразователи изготавливаются в виде отдельного блока, устанавливаемого как дополнительное устройство в дифманометрах, манометрах и других приборах, для преобразования их сигнала измерительной информации в унифицированный выходной сигнал постоянного тока 0-5мА.
|
|
|

Рисунок 3. Принципиальная схема механоэлектрического передающего преобразователя типа МП-Л.
Угловое перемещение выходной оси 1 первичного прибора 2, кинематически связанной с его чувствительным элементом, преобразуется при помощи кривошипа 3 и тяги в поступательное перемещение с одновременным преобразованием его цилиндрической пружиной 4 в усилие, прикладываемое к левому плечу коромысла 6. На другом плече коромысла укреплен дюралюминиевый флажок 7, к которому жестко прикреплена рамка 8 обратной связи. Флажок преобразователя находится в высокочастотном поле катушки индуктивности L, выполненной в виде однорядной плоской спирали. Катушка индуктивности с конденсатором С образуют базовый контур L-C генератора Г.
При перемещении коромысла, а вместе с ним и флажка, изменяются индуктивность катушки, а, следовательно, и параметры контура L-C, что приводит к изменению режима работы генератора и постоянного напряжения на нагрузочном сопротивлении генератора. Выходной сигнал генератора усиливается усилителем постоянного тока.
В выходную цепь усилителя постоянного тока включены обмотка рамки обратной связи, калиброванный резистор RK и резистор вторичной нагрузки RН (вторичных приборов и линий связи). Обмотка рамки находится в кольцевом зазоре, образованном сердечником 10 и полюсной накладкой 12. Между основанием сердечника и полюсной накладкой расположен постоянный магнит 11, имеющий форму усеченного конуса. При протекании тока через обмотку рамки обратной связи, она будет втягиваться в зазор, создавая усилие qо.с. а, следовательно, и момент, противодействующий моменту, создаваемому усилием q, цилиндрической пружины при ее растяжении. Изменение выходного тока усилителя будет происходить до тех пор, пока эти элементы не уравняются.
Внутри постоянного магнита предусмотрен шунт 9, который можно перемещать вдоль сердечника 10 с помощью специальных винтов, изменяя индукцию в зазоре, а вместе с тем и диапазон выходного сигнала преобразователя.
Калиброванный резистор RK предназначен для контроля работы преобразователя с помощью переносного потенциометра постоянного тока (без выключения его из работы). Этот резистор может быть также использован для получения унифицированного выходного напряжения постоянного тока 0-100 мВ.
Подвижная система преобразователя должна находиться в состоянии безразличного равновесия, что достигается балансировкой с помощью груза 5. Подвижная система преобразователя электрически изолирована с помощью прокладок от металлических его частей для устранения гальванической связи с землей.
Суммарное сопротивление внешней нагрузки RН преобразователя, обусловленное подключением вторичных приборов, регулирующих приборов, информационно-вычислительных машин и линиями связи дистанционной передачи не должно превышать 2,5 кОм.
3. Передающие преобразователи с магнитной компенсацией предназначены для преобразования линейного перемещения чувствительного элемента первичного прибора в унифицированный выходной сигнал постоянного тока. Принцип действия таких преобразователей заключается в том, что управляющий магнитный поток, создаваемый в специальном устройстве — индикаторе магнитных потоков при перемещении подвижного элемента — постоянного магнита (перемещаемого чувствительным элементом первичного преобразователя), компенсируется магнитным потоком обратной связи, создаваемым в этом же индикаторе током обратной связи. При этом устанавливается определенная зависимость между выходным током и перемещением подвижного элемента (постоянного магнита), а значит, и значением измеряемой величины.

Рисунок 4. Структурная схема преобразователя с магнитной компенсацией
Структурная схема преобразователя приведена на рис. 6. Упругий чувствительный элемент / первичного преобразователя преобразует измеряемую величину у в линейное перемещение х постоянного магнита 2 преобразователя. При перемещении магнита изменяется управляющий магнитный поток  , который в индикаторе магнитных потоков 3 сравнивается с магнитным потоком обратной связи
, который в индикаторе магнитных потоков 3 сравнивается с магнитным потоком обратной связи  . На выходе индикатора появляется напряжение U , пропорциональное разности магнитных потоков
. На выходе индикатора появляется напряжение U , пропорциональное разности магнитных потоков  , которое усилителем 4 преобразуется в выходной токовый сигнал
, которое усилителем 4 преобразуется в выходной токовый сигнал 
Выходной ток  поступает в линию дистанционной передачи и одновременно в устройство обратной связи 5, выходной ток которого
поступает в линию дистанционной передачи и одновременно в устройство обратной связи 5, выходной ток которого  создает магнитный поток
создает магнитный поток  , компенсирующий магнитный поток
, компенсирующий магнитный поток  . Таким образом, при увеличении измеряемой величины у увеличивается смещение магнита х, увеличивается управляющий магнитный поток
. Таким образом, при увеличении измеряемой величины у увеличивается смещение магнита х, увеличивается управляющий магнитный поток  и, следовательно, необходимы большие выходной ток
и, следовательно, необходимы большие выходной ток  и ток обратной связи
и ток обратной связи  для создания магнитного потока
для создания магнитного потока  , компенсирующего
, компенсирующего 
Устройство обратной связи 5 позволяет установить необходимый закон преобразования  . Эта зависимость может быть либо линейной (в приборах для измерения давления, разности давлений, уровня), либо квадратичной (в расходомерах по перепаду давления на сужающем устройстве).
. Эта зависимость может быть либо линейной (в приборах для измерения давления, разности давлений, уровня), либо квадратичной (в расходомерах по перепаду давления на сужающем устройстве).
Магнитная система преобразователя состоит из двух магнитопроводов, двух индикаторов магнитных потоков и расположенного между ними подвижного магнита. Для упрощения рассмотрения принципа образования магнитного потока  рассмотрим схему магнитных потоков лишь в одном магнитопроводе (рис. 5), поскольку схема потоков в другом магнитопроводе аналогична. Основной магнитный поток
рассмотрим схему магнитных потоков лишь в одном магнитопроводе (рис. 5), поскольку схема потоков в другом магнитопроводе аналогична. Основной магнитный поток  постоянного магнита / замыкается через магнитопровод 2, Меньшие потоки
постоянного магнита / замыкается через магнитопровод 2, Меньшие потоки  и
и  замыкаются через магнитопровод индикатора магнитных потоков 3. Потоки
замыкаются через магнитопровод индикатора магнитных потоков 3. Потоки  и
и  направлены навстречу друг другу. Магнитный поток
направлены навстречу друг другу. Магнитный поток  представляет собой разность потоков
представляет собой разность потоков  и
и  , т. е. результирующий поток, протекающий по магнитопроводу индикатора,
, т. е. результирующий поток, протекающий по магнитопроводу индикатора, 


Рис. 5. Схема образования управляющего магнитного потока
В среднем положения магнита (рис. 5, а) потоки  и
и  равны и противоположно направлены, поэтому результирующий поток
равны и противоположно направлены, поэтому результирующий поток  практически отсутствует. При смещении магнита, например, вправо (рис. 5, б) от нейтрального положения поток
практически отсутствует. При смещении магнита, например, вправо (рис. 5, б) от нейтрального положения поток  становится больше потока
становится больше потока  и по магнитопроводу индикатора 3 начинает протекать результирующий магнитный поток
и по магнитопроводу индикатора 3 начинает протекать результирующий магнитный поток  определенного направления. Интенсивность этого потока зависит от степени смещения магнита от нейтрального положения. Поскольку магнит смещается чувствительным элементом и, следовательно, это смещение определяется значением измеряемой величины,
определенного направления. Интенсивность этого потока зависит от степени смещения магнита от нейтрального положения. Поскольку магнит смещается чувствительным элементом и, следовательно, это смещение определяется значением измеряемой величины,  также зависит от этого значения. На магнитопроводе индикатора размещены обмотка возбуждения, питаемая пульсирующим током, и обмотка обратной связи, по которой протекает постоянный ток обратной связи. Уже указывалось, что преобразователь с магнитной компенсацией содержит один подвижный магнит, два вспомогательных магнитопровода и два индикатора магнитных потоков I и II (рис. 6). Таким образом, электрическая схема преобразователя содержит по две обмотки возбуждения и обратной связи, расположенные на двух разных индикаторах магнитных потоков. Магнитные потоки постоянного магнита
также зависит от этого значения. На магнитопроводе индикатора размещены обмотка возбуждения, питаемая пульсирующим током, и обмотка обратной связи, по которой протекает постоянный ток обратной связи. Уже указывалось, что преобразователь с магнитной компенсацией содержит один подвижный магнит, два вспомогательных магнитопровода и два индикатора магнитных потоков I и II (рис. 6). Таким образом, электрическая схема преобразователя содержит по две обмотки возбуждения и обратной связи, расположенные на двух разных индикаторах магнитных потоков. Магнитные потоки постоянного магнита  и обмотки обратной связи
и обмотки обратной связи  в каждом индикаторе направлены навстречу друг другу, а магнитный поток обмотки возбуждения
в каждом индикаторе направлены навстречу друг другу, а магнитный поток обмотки возбуждения  в одном индикаторе складывается с
в одном индикаторе складывается с  , а в другом они вычитаются (рис. 6).
, а в другом они вычитаются (рис. 6).
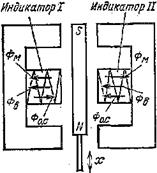
Рис. 6. Конструктивная схема преобразователя с магнитной компенсацией
Преобразователи с магнитной компенсацией обладают рядом достоинств; возможностью подключения нескольких вторичных приборов к одному преобразователю, достаточно высокой виброустойчивостью и надежностью. Недостатки — довольно высокая температурная погрешность и невозможность работы в среде, вредно влияющей на элементы электронной схемы усилителей (находящиеся в корпусе первичного преобразователя). К недостаткам следует также отнести большое влияние на погрешность первичного преобразователя погрешностей чувствительного элемента и индикатора магнитных потоков, так как они не охвачены обратной связью. Это ограничивает возможность создания точных приборов с такими преобразователями. Преобразователи этого типа имеют класс 1 и 1,5.
Контрольные вопросы:
1. Принцип действия системы дистанционной передачи информации на ферромагнитных преобразователях?
2. Особенности электромеханической системы дистанционной передачи информации?
3. Особенности, достоинства и недостатки магнитной системы дистанционной передачи?
Вопросы для самостоятельного изучения:
1. Выучить определения.
2. Выучить схемы дистанционной передачи измерительной информации.
Литература:
Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Учебник для вузов. Ленинград: Энергоатомиздат, 1983. - 315 с.
2. Аш. Ж., Датчики измерительных систем, Книга 1, М.: Мир, 1992, 480 с.
3. Аш. Ж., Датчики измерительных систем, Книга 2, М.: Мир, 1992, 424 с.
4. Виглеб. Г., Датчики. – М.: Мир, 1989. – 196с., ил.
5. Полишук Е. С.Измерительные преобразователи. — Киев : Вища школа. Головное изд-во, 1981.— 296 с.
Дата добавления: 2021-03-18; просмотров: 53; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!