Основные требования к изделию
Проанализировав, области применения и технические особенности уже созданных робототехнических систем при создании модели нашего робота, мы предъявили к нему ряд требований:
1. Эстетические: робот должен быть оригинальным и многофункциональным.
2. Эксплуатационные:
· система управления;
· датчик касания, используется для остановки двигателей;
· датчик цвета (в реальных условиях видеокамера);
· 4 больших колеса, для эксплуатации робота в труднопроходимых условиях;
· модуль со схватом;
· отвал (для выполнения двух функций: транспортировки грузов и планировки и перемещения грунтов);
· буровая установка, для бурения завалов;
· прочная конструкция.
Третьим этапом нашей работы было конструирование модели робота.
Практическая часть
Состав робототехнического комплекса
Одной из задач нашего проекта являлось создание рабочей модели робота. Эта задача была реализована с помощью общеобразовательного робототехнического модуля Технолаб. Платформа состоит из аппаратной и программной частей. Для программирования использовался объектно-ориентированный язык ROBOTC.
В состав робототехнического комплекса входят:
ü программируемый контроллер;
ü двигатели –5: 2 для управления колес, 2 – для управления схватом и 1 для управления бура;
ü радио: модуль управления VEXIQ передает сигналы управления устройством с помощью радиоволн или кабеля;
|
|
|
ü датчик цвета - это устройство ввода, которое способно воспринимать цвета;
ü датчик касания используется для остановки двигателей;
ü пульт управления.
Обзор системы управления
Контроллер (рисунок 1): Контроллер является центром управления всего робота. Мозговой центр робота использует технологии с широкими функциональными возможностями и упрощает их до уровня пользователя, сохраняя высокий уровень. Можно подключить любую комбинацию портативных устройств (до 12 штук) к контроллеру робота, все они будут управляться встроенными программами или запрограммированным компьютером и совместимым программным обеспечением. В дополнение к заранее запрограммированным командам робот может управляться различными драйверами при помощи оператора.
В качестве питания используется аккумулятор.
Радио (рисунок 2): Модуль управления Vex IQ передает сигналы управления устройствам с помощью радиоволн или кабеля.
Пульт управления (рисунок 3): Пульт управления является той частью робота, которая делает сборку интересной, а процесс управления легким. Пульт управления позволяет мгновенно приводить робота в движение с помощью двухосевых джойстиков и восьми кнопок.
|
|
|
Двигатели (рисунок 3): Двигатели преобразуют электрическую энергию в механическое движение. Приводят в движение оси, схват, бур и др.
Используемые датчики (рисунок 4 и 5): Датчики позволяют анализировать окружающее пространство и реагировать на изменения в ней.
Ходовая часть
Робот – помощник передвигается на 4 колесах. Ходовая часть состоит из двух одинаковых блоков, по одному на сторону робота – помощника (рисунок 5), работающих синхронно от одного пульта управления. Блок устроен следующим образом: двигатель вращает колесо, на оси которого стоит шестерня. Она передает вращение промежуточной шестерни, та в свою очередь передает вращение другой шестерне, которая соединена с осью второго колеса. Передаточное число шестерен обеспечивает одинаковую скорость вращения двух колес.
Робота – помощника приводит в движения два двигателя (рисунок 7). При разной скорости вращения этих двигателей осуществляется изменение направления движения (поворот, разворот). При обратном вращении двигателя робот движется назад.
Механизм захвата
Устройство механизма захвата показано на рисунке 8. На оси двигателя находится ведущая шестерня и левый «палец» захвата. С правой стороны находится ведомая шестерня, жестко соединенная с правым «пальцем» захвата. При вращении двигателя вращается ведущая шестерня, передавая обратное вращение ведомой шестерне. При этом «пальцы» захватывают или разжимают, какой либо предмет.
|
|
|
Механизм подъема
После того, как робот – помощник захватил объект, он может поднять его. Устройство механизма подъема показано на рисунке 9. Ось двигателя располагается на всю ширину робота, с левой и правой стороны на ней расположены малые ведущие шестерни. Выше них находятся в зубчатом зацеплении большие ведомые шестерни. На них жестко присоединены балки, к которым присоединен механизм захвата. Работа механизма подъема осуществляется следующим образом: ведущие шестерни передают вращение ведомым шестерням, те в свою очередь приводят в движение балки, соответственно поднимают или опускают механизм захвата.
Буровой механизм
Устройство бурового механизма показано на рисунке 10. Ось двигателя располагается поперечно на всю ширину робота. На оси находятся шестерни различных диаметров (выступают в роли буровых коронок) (рисунок 11).
Отвал
Отвал показан на рисунке 12 и 13. При необходимости подчистки почвы на робот устанавливается отвал. Балки отвала крепятся на ось ведомых шестерен механизма подъема. Отвал может быть в рабочем положении на почве или находится сверху на роботе (для перевозки предметов).
|
|
|
Подъем и опускание отвала обеспечивает механизм подъема(рисунок 14).
От каждого двигателя отходят провода с разъемами, идущие к контролеру. Каждый разъем соответствует определенному порту.
Созданием такого робота конечно должны заниматься инженеры конструкторы, поэтому при создании нашего робота мы обратились за консультацией к инженеру конструктору Толочко Евгению Михайловичу.
В ходе выполнения проекта нами был создан Робот- помощник. Наша модель – это попытка помочь в решении проблемы обеспечения безопасности спасателям при проведении аварийно – спасательных работ.
Вывод
Работа над проектом показала следующие возможности реализации идеи: при использовании робота в реальных условиях он должен быть оснащен видеокамерой с обзором на 240 градусов, с помощью которой спасатели смогли бы видеть, что находится вокруг робота. Размеры робота – помощника должны быть не очень большими (примерно в два раза меньше среднего человеческого роста), чтобы была возможность проникать в небольшие проемы, разломы. Для передвижения по неровным поверхностям каждое колесо необходимо снабдить отдельными электродвигателями, которые могли бы работать как в синхронном, так и несинхронном режимах. Манипулятор должны обладать большой силой, для возможности подъема грузов в несколько раз превышающей массу самого робота, а так же бур должен быть очень мощным, т.е. он должен будет работать как стационарная буровая машина. Самой главной функцией «рук» робота – помощника должна быть возможность безболезненного захвата пострадавшего для его дальнейшей транспортировки в безопасное место.
Экономический эффект от внедрения:на разработку и внедрение устройства потребуется значительное вложение средств, однако после успешных испытаний роботом – помощником с большой долей вероятности заинтересуются многие страны. От экспорта можно будет получать большую прибыль. Но самый главный эффект от внедрения – это тысячи спасенных жизней.
Возможные риски для внедрения идеи: большие вложения на стадии разработки и испытаний, дороговизна материалов и деталей. Требуются особые технические и интеллектуальные условия для реализации проекта.
Мы видим большие перспективы развития роботостроения в создании роботов-помощников. Планируем в дальнейшем, продолжить работу над модернизацией робота-помощника.
Список использованной литературы, интернет ресурсы
1. Википедия http://ru.wikipedia.org
2. М.С. Федонов, Р.Р. Шарафиев «Проектирование и применение робототехничес- ких средств при проведении аварийно-спасательных работ при ликвидации чре- звычайных ситуаций» http://www.lib.tpu.ru/fulltext/c/2014/C52/110.pdf
3. Д.Г. Копосов «Первый шаг в робототехнику: практикум для 5-6 классов»,
М.: БИНОМ, Лаборатория знаний, 2012г.
4. http://studopedia.ru/3_167012_vidi-avariy-v-shahtah.html
5. http://examen-technolab.ru
6. http://vexiq.ru/
7. http://www.modkit.com/vex
8. http://vex.examen-technolab.ru/build-instructions_iq
Приложение I
Виды аварий
Подземные пожары являются наиболее распространёнными и сложными видами аварий в шахтах. Подземными называются пожары, возникающие в горных выработках шахт. К подземным относятся и пожары, которые возникают на поверхностных комплексах горного предприятия и при этом продукты горения могут поступать в горные выработки шахты.
Наиболее опасными являются пожары в действующих выработках шахт, т.к. они характеризуются быстрой активизацией и угрозой массового отравления людей продуктами горения.
Для людей, ведущих борьбу с пожаром, особенно развитым, появляются дополнительные осложняющие факторы и опасности, основными из которых являются: задымлённость атмосферы, высокая температура воздуха в районе очага пожара и на исходящей струе, возможные завалы выработок в связи с выгоранием или деформацией крепи, скопление взрывчатых газов до опасных концентраций и их взрывы при пожарах в газовых шахтах, выбросы пара при тушении больших раскалённых масс водой и образование взрывчатых концентраций газов (водорода) при разложении воды, вероятность опрокидывания вентиляционной струи под действием тепловой депрессии при пожарах в наклонных и вертикальных выработках.
Обрушения горных выработок являются довольно распространённой причиной травматизма людей. Завалы, а также горные удары характеризуются быстрым обрушением больших объёмов горной массы, в результате чего горная выработка выходит из строя, а под обрушением или за ним могут оказаться люди. При этом для людей, оказавшихся застигнутыми обрушением, а также ведущих спасательные работы, появляются дополнительные опасности: повторные завалы и обрушения, загазирования выработок в результате нарушения или полного прекращения проветривания, пожары от короткого замыкания в электрокабелях при их нарушении, внезапные выбросы угля и газа на выброс оопасных пластах. Обрушения обычно носят локальный характер, однако, эти аварии на крутых пластах наиболее опасны, а ведение спасательных работ при этом связано с большими трудностями.
Затопление выработок водой может произойти в шахтах, имеющих большой приток воды, при остановке насосов главного водоотлива. Но аварии от внезапных прорывов воды, скопившейся в выработках верхних отработанных горизонтов шахт или в естественных резервуарах на поверхности, являются опасными для людей, работающих в нижних горизонтах и наклонных тупиковых выработках. При этом кроме угрозы затопления, возникает ещё недостаток воздуха и создаётся опасность затопления запасных выходов из шахты. Угрожающий приток воды с поверхности (при таянии снега, сильных дождях и т.д.) может поступать в горные выработки через устья стволов, шурфов, буровых скважин, по трещинам и провалам. Необходимо иметь в виду, что большинство прорывов воды из старых выработок сопровождается выделением взрывчатых и ядовитых газов (метана, углекислого газа, сероводорода и др.), а также обвалами пород в выработках.
Внезапные выбросы газа – весьма сложные и опасные шахтные аварии, происходящие внезапно, при которых в нормальных производственных условиях из разрабатываемого пласта с большой силой выбрасывается газ.
При этих авариях происходят завалы горных выработок, загазирования сети выработок по всей исходящей струе, возможны взрывы газа, нарушение проветривания аварийных участков.
Загазирование выработок вредными для здоровья и жизни людей газами может быть опасным, если оно происходит быстро и люди не успевают покинуть эти выработки и выйти на свежую струю воздуха. Загазирование выработок может происходить разными газами, в том числе углекислотой, метаном, окисью угерода, сернистым газом, сероводородом и др.
Углекислый газ обычно может проникать в горные выработки из старых, заполненных этим газом выработок или из изолированных пожарных участков. При всех условиях появление углекислого газа в местах работы людей опасно, так как, вытесняя кислород, он делает рудничную атмосферу непригодной для дыхания.
Загазирование действующих выработок может произойти и в результате нарушения проветривания отдельных участков, горизонтов и шахты в целом при остановке вентилятора, в результате завалов в горных выработках, затопления их водой.
Взрывы газа являются наиболее сложными и опасными шахтными авариями. При этом основными поражающими факторами для людей являются: ядовитые продукты взрыва и бескислородная среда в исходящей струе воздуха, ударная волна и высокая температура атмосферы. Ведение работ по ликвидации последствий взрывов осложняются дополнительными опасностями для людей: нарушением или полным прекращением проветривания, возможными пожарами, повторными взрывами, завалами горных выработок.
К взрывчатым газам, которые могут появляться в шахтной атмосфере, относятся: метан, водород, окись углерода и сероводород. Самыми распространёнными в шахтах являются взрывы метана.
Приложение I I

Рис 1. Контроллер

Рис 2. Радио

Рис 3. Пульт управления

Рис 3. Двигатель

Рис 4. Датчик касания

Рис 5. Датчик цвета
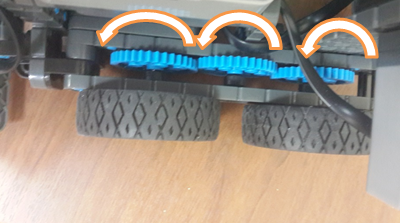
Рис 6. Блок ходовой части.

Рис 7. Двигатель блока.

Рис 8. Механизм захвата.

Рис 9. Механизм подъема.
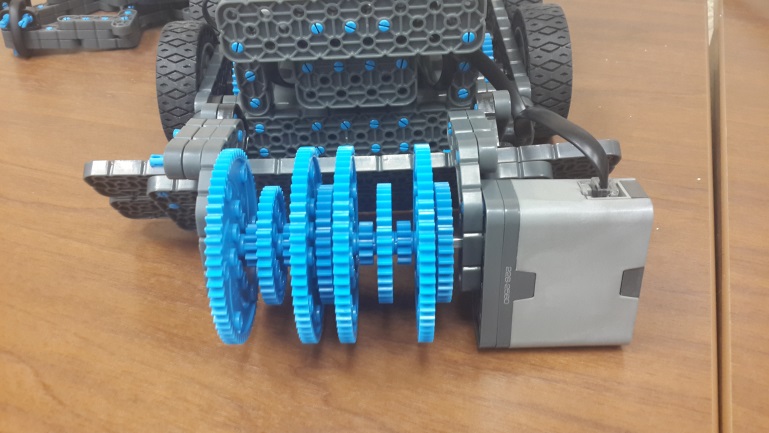
Рис 10. Буровой механизм.


Рис 11. Работа бурового механизма.
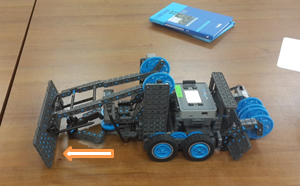
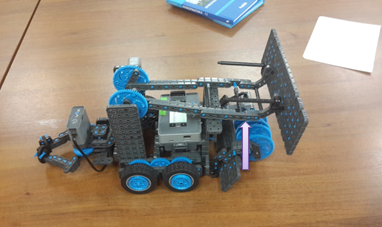
Рис 12. Отвал для перевозки груза.
Рис 13.Отвал в рабочем положении.

Рис 14. Захват отвала.
Дата добавления: 2021-02-10; просмотров: 88; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!