Проанализировать с труктура мехатронного модуля и мехатронной системы
Практическое занятие №1
Построение структурной схемы мехатронного модуля
Цель работы: Изучение структуры и принципов построения мехатронных систем
Сведения из теории
Методологической основой разработки мехатронных систем служат методы параллельного проектирования (concurrent engineering methods). При традиционном проектировании машин с компьютерным управлением последовательно проводится разработка механической, электронной, сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков.
Парадигма параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонент системы.
На рис.1. представлена обобщенная структура машин с компьютерным управлением (автоматических роботов), используемых в машиностроении. Данная схема позволяет показать принципы построения мехатронных систем.
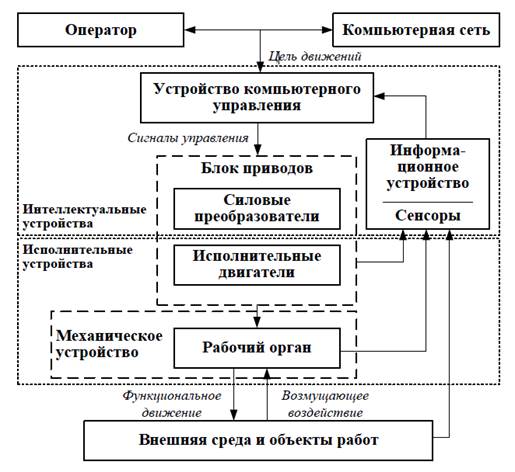
Рис. 1. Обобщенная схема машины с компьютерным управлением движением
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит основное и вспомогательное оборудование, технологическую оснастку и объекты работ.
При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
|
|
|
Внешние среды делят на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой точностью для проектирования мехатронных систем. Некоторые среды являются недерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.). Характеристики технологических сред, как правило, могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для определения сил резания при механообработке проводятся экспериментальные исследования на специальных установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и/или компьютерных моделей возмущающих воздействий.
Однако для проведения таких исследований, как правило, требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган на операции роботизированного удаления облоя с отливок необходимо контролировать их форму и размеры. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения рабочих органов мехатронных систем непосредственно в ходе выполнения операции.
|
|
|
В состав традиционной машины входят следующие основные компоненты: механическое устройство (конечное звено - рабочий орган; блок приводов, включающий силовые преобразователи и исполнительные двигатели; устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении мехатронной системы.
Таким образом, наличие трех обязательных частей – механической (электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком мехатронных систем.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа. Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления. В состав этого устройства обычно входят компьютер верхнего уровня и контроллеры управления движением.
|
|
|
Устройство компьютерного управления выполняет следующие основные функции:
• управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации;
• организация управления функциональными движениями мехатронной системы, которая предполагает координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами.
• взаимодействие с оператором через интерфейс в режимах автономного программирования (off-line) и непосредственно в процессе движения мехатронной системы (on-line).
|
|
|
• организация обмена данными с периферийными устройства-ми, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления, в целенаправленное механическое движение с управлением на основе принципа обратной связи.
Характерно, что электрическая энергия (реже гидравлическая или пневматическая) используется в современных системах как промежуточная энергетическая форма.
Особенность мехатронного подхода к проектированию заключается в интеграции в единый функциональный модуль двух или более элементов возможно даже различной физической природы. Соответственно на стадии проектирования из традиционной структуры машины исключается как минимум один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем.
В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, будет выполнять заданное функциональное движение с допустимой погрешностью. Аппаратное объединение элементов в единые конструктивные модули обязательно сопровождают разработкой интегрированного программного обеспечения.
Программные средства обеспечивают непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени.
Применение мехатронного подхода при создании машин с компьютерным управлением определяет их основные преимущества по сравнению с традиционными средствами автоматизации:
• относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации элементов и интерфейсов;
• высокую точность сложных движений вследствие применения методов интеллектуального управления;
• высокую надежность, долговечность и помехозащищенность;
• конструктивную компактность модулей (вплоть до миниатюризации в микромашинах);
• улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
• возможность комплексирования функциональных модулей в сложные системы и комплексы под конкретные задачи заказчика.
План работы
Проанализировать с труктура мехатронного модуля и мехатронной системы
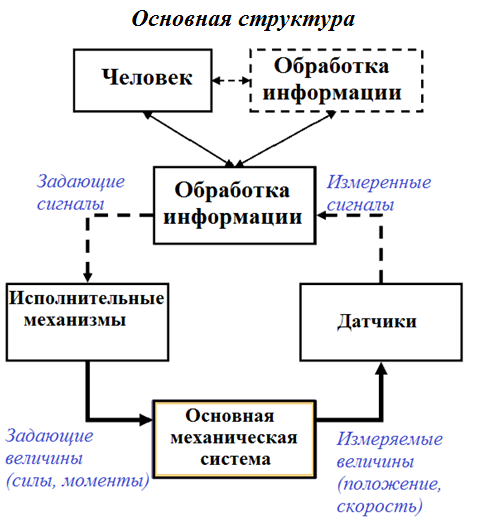
Рис.2. Структура мехатронной системы
Контрольные вопросы
1. Дайте определение термина «мехатроника».
2. Что такое мехатронный объект?
3. Каким мехатронным уровням может соответствовать технический объект? Приведите примеры.
4. Что такое «устройство»?
5. Мехатронность технических объектов, что это такое?
5. Какие основные принципы положены в основу построения мехатронных систем?
6. Какие устройства могут являться составной частью машин с компьютерным управлением движением?
7. Какие функции выполняет устройство компьютерного управления в мехатронной системе или модуле?
8. Объясните суть мехатронного подхода к проектированию.
9. Какие основные преимущества мехатронного подхода при создании машин с компьютерным управлением по сравнению с традиционными средствами автоматизации?
Библиографический список
1. Подураев Ю.В. Мехатроника: основы, методы, применение [Текст]: учеб. пособие для вузов Серия: Для вузов/ М.: Машиностроение, 2006. – 256 с.
2. Юревич Е. И. Основы робототехники [Текст]: учеб. пособие для вузов / Юревич Е. И.; 2-е изд. - СПБ.: БХВ-Петербург,2005. - 416 с.
3. Шошиашвили М.Э., Шошиашвили И.С. Механика управляемых машин и мехатронных систем [Электронный ресурс]: учебное пособие [для вузов]. 2-е изд., доп. Юж.-Рос. гос. техн. ун-т (НПИ) – Новочеркасск: ЮРГТУ (НПИ), 2012. – 188 с.
4. Элементы мехатроники [Текст]: учеб. пособие/ Глебов Н.А., Булгаков А. Г., Гераськин Д. П.; Юж.-Рос. гос. техн. ун-т (НПИ). - Новочеркасск: Изд-во ЮРГТУ(НПИ), 2006. – 128 с.
Дата добавления: 2021-02-10; просмотров: 757; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!