ХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХ
ВТОРОЙ ПОДХОД К РАСЧЕТУ
Рассмотренный ранее подход к расчету дополнительных резисторов имеет право на существование. Однако, опыт показал, что он не является удачным, так как в результате максимальные пусковые токи на каждом из этапов пуска различаются в несколько раз. А ведь с точки зрения равномерности нагрузки сети и благоприятного режима работы ДПТ было бы рационально иметь на каждом из этапов пуска равные максимальные пусковые токи. Попробуем реализовать такой подход.
1. Пуск с одним добавочным резистором.
Так как в начале первого этапа пуска якорь неподвижен, максимальный пусковой ток на этом этапе будет равен:
 , (1в)
, (1в)
где RД – сопротивление дополнительного резистора.
Если дополнительный резистор будет отключаться при токе якоря равном I2, то в этот момент угловая скорость будет равна:?
 . (2в)
. (2в)
Тогда максимальный ток на втором этапе пуска будет равен:
 . (3в)
. (3в)
Приравнивая правые части (1в) и (3в), получим:
 . (4в)
. (4в)
Или
 . (5в)
. (5в)
Решая квадратное уравнение (5в), получим искомое значение RД. Решение можно искать вручную, а можно с использованием математического инструментария Mat Lab (оператор roots ( P ), где Р – матрица строка коэффициентов уравнения). Естественно, решения не отвечающие физическому смыслу нужно отбросить.
|
|
|
Найденное решение подставляем в (1в) и проверяем выполнение условия:
 . (6в)
. (6в)
Если условие (6в) выполняется, то задача решена. Если не выполняется, то необходимо перейти к рассмотрению пуска с двумя дополнительными резисторами.
2. Пуск с двумя дополнительными резисторами.
Пусть система имеет два дополнительных резистора RД1 и RД2. Причем после первого этапа пучка отключается резистор RД1, а после второго – резистор RД2. Тогда максимальный ток на первом этапе пуска будет равен:
 . (7в)
. (7в)
Далее, рассуждая аналогично случаю пуска с одним резистором, получим уравнение третьей степени относительно RД2.
 . (8в)
. (8в)
Решая его, найдем четыре корня, из которых необходимо отобрать один, исходя из критерия физической реализуемости. Затем по формуле:
 . (9в)
. (9в)
Рассчитывается сопротивление резистора RД1. Подставляя найденные значения сопротивлений в (7в), найдем максимальный пусковой ток, а затем проверим выполнение условия (6в). Если оно выполняется, то задача успешно решена.
Пример. Пусть R=0,2 Ом; U=60В; I2=5,3 А; I1=25 А.
|
|
|
Проверим возможность пуска двигателя с одним дополнительным резистором. Подставляя исходные данные в уравнение (5в), получим:
 . (10в)
. (10в)
Решим это уравнение с использованием MatLab:
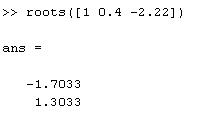
Так как сопротивление не может быть отрицательным, выберем  .
.
Подставляя в (1в), найдем максимальный пусковой ток  А. Следовательно, условие (6в) не выполняется.
А. Следовательно, условие (6в) не выполняется.
Проверим возможность запуска двигателя с двумя дополнительными резисторами. Подставляя исходные данные в уравнение (8в), получим:
 . (8в)
. (8в)
Решая его с использованием MatLab, получим:
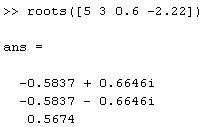
Так как сопротивление не может быть комплексно-сопряженным, выберем  .
.
Подставляя  в формулу (9в), найдем
в формулу (9в), найдем  . Подставляя результаты в (7в), найдем максимальный пусковой ток:
. Подставляя результаты в (7в), найдем максимальный пусковой ток:
 А. (7в)
А. (7в)
Условие (6в) выполняется, следовательно, задача решена.
ХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХ
3. РАСЧЕТ СОПРОТИВЛЕНИЙ РЕЗИСТОРОВ
Для естественной характеристики (нулевая ступень) полное сопротивление якорной цепи R яо равно сопротивлению якорной обмотки R (рис.2). На первой ступени:
R Я1 = R + R Д1 , (6)
|
|
|
где добавочное сопротивление R Д1 определяется так:
R Д1 = 
На второй ступени
R Я2 = R + R Д1 + R Д2 (7)
где R Д2 =  ( R + R Д1 )
( R + R Д1 )
В общем случае для i -ой ступени:
R я i = R + R Д l + R Д2 +... + R Д i , (8)
R Д1 =  (9)
(9)
При определении сопротивления резистора для динамического торможения Rr исходят из того, что максимальный ток при динамическом торможении не должен превосходить по величине ток I 1 .
Поэтому
 (10)
(10)
5. УПРОЩЕННЫЙ РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ ПУСКЕ И ДИНАМИЧЕСКОМ ТОРМОЖЕНИИ
Дифференциальное уравнение, определяющее изменение тока it во время переходных процессов при пуске на i -й ступени имеет вид:
 (11)
(11)
где Тя i ; - электромагнитная постоянная времени на i -й ступени; TMi -электромеханическая постоянная времени на i -й ступени; I yi - установившееся значение тока на i -й ступени;
T я i = L / R я i (12)
Tmi = R я i J / k 2 эм (13)
|
|
|
При расчете "вручную" пренебрегают индуктивностью L якорной обмотки, т.е. принимают Тяi ≈ 0. Тогда можно получить:
 (14)
(14)
Решение уравнения (14) имеет вид:
i я = I у i  + I нач i
+ I нач i 
где I нач i - начальное значение тока на i -й ступени. В данном случае для всех ступеней
I у i = Ic I нач i = I 1
Этому для каждой ступени ток iя определяется уравнением (16)
i я = I с  + I 1
+ I 1  (16)
(16)
На основании (16) время tui , в течение которого ток в якоре уменьшается на i -й ступени, определяется так:
tui = Т mi ln 
Для рассматриваемого примера формула (17) позволяет определить время пуска на второй и первой ступенях. При пуске двигателя по естественной характеристике
T ио  3Тмо, где Тмо = RJ / k 2 эм
3Тмо, где Тмо = RJ / k 2 эм
Здесь ток якоря уменьшается от I 1, до Ic .
Дифференциальное уравнение, определяющее изменение частоты вращения двигателя  на i -й ступени, имеет вид:
на i -й ступени, имеет вид:
Тя i T м i  T м i
T м i  = у i (18)
= у i (18)
При Тя i 0 , получаем
T м i 
 =
=  у i (19)
у i (19)
где у i – установившаяся частота вращения двигателя на i -й ступени. Решение этого уравнения имеет вид:
= уi + нач i  (20)
(20)
где нач i - начальная частота вращения на i -й ступени.
Каждой ступени при определении соответствует не только свое значение T м i, но и свои значения начальной и установившейся величин частоты вращения ( нач i , у i ). Так, для рассматриваемого примера (рис.2) при пуске на второй ступени:
нач 2 = 0; у2 = с2 , где с2 =  ,
,
а величина RЯ2 определяется уравнением (7).
При пуске на первой ступени:
нач 1 = 2 = 
у1 = с1 = 
где величина R Я1 определяется уравнением (6).
При пуске по естественной характеристике (нулевая ступень):
нач 0 = 1 = 
В общем случае при разгоне по i-й ступени:
нач i = 
у i = 
Рассмотрим теперь переходные процессы в режиме динамического торможения. Для реализации этого режима якорь двигателя отключается от сети и замыкается на резистор RT, а обмотка возбуждения остается под напряжением, Если считать, что индуктивность якорной обмотки равна 0, то при этом переключении ток в якорной цепи скачком изменяется от IС до I Т (рис. 2), где I Т - величина отрицательная. Рабочая точка перемещается с естественной характеристики 1 на характеристику динамического торможения 2. Далее величины i я и уменьшаются до нуля. Если бы после достижения равенства = 0 момент сопротивления не изменил своего знака и оставался постоянным по модулю, то двигатель изменил бы направление вращения и достиг частоты т при токе i я = ic ,
где т =  (23)
(23)
Однако, после достижения частоты вращения = 0 момент сопротивления меняет свой знак и двигатель останавливается. Ранее указывалось, что при выполнении этой курсовой работы момент нагрузки представляет собой момент сухого трения. Для определения тока якоря во время динамического торможения можно воспользоваться уравнением (15), приняв:
I у i = Iс ; I нач = I Т
При этом получим:
i я = Ic (1 – е- t / T mg) + I Т е- t / T mg (24)
где Т m д =  ; R ят = R Т + R .
; R ят = R Т + R .
Для определения изменения в процессе динамического торможения можно использовать уравнение (20), приняв
уi = T; нач i = c
При этом получаем
= T(1 – е- t / T mg) + c е- t / T mg (25)
Уравнения (24), (25) справедливы до достижения = 0.
Учитывая, что в конце динамического торможения = 0, на основании (25) можно определить время динамического торможения
t T = Т mg ln  ,
,
где T - величина отрицательная.
РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ НА ЭВМ
Расчет переходных процессов на ЭВМ отличается от расчета "вручную" тем, что здесь решаются не упрощенные, а полные дифференциальные уравнения с учетом индуктивности обмотки якоря, определяющие изменения i 2 и , т.е уравнения (11), (18).
Известно, что при
T м i >4Тя i (26)
Переходной процесс получается апериодическим и решения дифференциальных (11), (18) имеют вид:
= у + А1е  + А2е
+ А2е 
i Я = I С+ В1е +В2е ,
где корни характеристического уравнения, А1,А2,В1,В2 — постоянные шия, которые определяются из начальных условий.
При T м i < 4 Тя i (27)
переходный процесс получается колебательным, а функции и iЯ определяются так:
= у + еа t (Cl cos  t + C2 sin t),
t + C2 sin t),
i Я = I С + еа t (Dl cos t + D2 sin t),
Здесь корни характеристического уравнения получаются комплексно-сопряженными, т.е. равными а± j :
 = -
= -  =
= 
Постоянные интегрирования С1,С2, D 1 , D 2 находятся из начальных условий, для чего для каждой ступени при t =0 определяются соответственно i Я и di я / dt , и d / dt
При учете индуктивности цепи якоря L существует небольшой дополнительный интервал переходного процесса, который длится от момента замыкания контакта КМ1 (рис.1) до момента достижения тока в якоре значения I С. Время этого интервала определяется также, как и время трогания электромагнитных реле
t тр = Тя i ln 
где величина Тя i соответствует той ступени, с которой начинается пуск. Для рассматриваемого примера Тя i = ТЯ2.
Работа на ЭВМ типа IBM ведется в диалоговом режиме. Обозначения всех переменных соответствуют указанным в настоящих методических указаниях. Для утвердительного ответа на вопросы типа "Изменить исходные данные?" необходимо нажать клавишу <У>,для отрицательного ответа - клавишу <N>. Результаты расчетов (таблицы, графики) возможно выводить на экран, в виде файла или на принтер.
Дата добавления: 2021-02-10; просмотров: 50; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!