Исследование механических характеристик двигателя
Исследование асинхронного электродвигателя с фазным ротором
Цель работы
Исследование механических и рабочих характеристик асинхронного электродвигателя с фазным ротором.
Методические указания
Изучите рекомендации по исследованию моделей электротехнических устройств в MatLab
Содержание работы
Исследование естественных механических характеристик асинхронного электродвигателя с фазным ротором при питании от источника с неизменным напряжением и частотой.
Исследование искусственных механических характеристик асинхронного электродвигателя с фазным ротором при включении дополнительного сопротивления в цепь ротора.
Исследование рабочих характеристик асинхронного электродвигателя с фазным ротором при включении дополнительного сопротивления в цепь ротора.
Описание модели
Откройте окно MatLab, нажмите File/ Open, откройте папку work/11 ML, найдите и откройте файл psb_11 ml.
Модель для исследования асинхронного двигателя с фазным ротором (рис. 11.1) содержит следующие блоки из библиотек Simulink и SimPowerSystem:
· трехфазный источник синусоидального напряжения 3- phase Sourse из SimPowerSystem/Electrical Sources;
· асинхронная машина Asynchronous Machineиз SimPowerSystem/ Machines;
· блоки дополнительных резисторов, включенных в цепь фазных обмоток ротора 3-Phase R и 3-Phase R_1 и трехфазный выключатель 3-Phase Breaker из SimPowerSystem/ Extra Library/3-Phase Library;
· шины для соединения 3 входящих линий Bus Bar3 и Bus Bar3_1 из SimPowerSystem/Connectors
|
|
|
· источники постоянного воздействия Constant и линейно изменяющегося воздействияRamp из Simulink/Sources;
· блок измерения мгновенного значения фазного напряжения USf источникаиз SimPowerSystem/Measurements/Voltage Measurement;
· блок измерения мгновенного значения фазного тока ISf источникаиз SimPowerSystem/Measurements/Current Measurement;
· блок измерения амплитудных значений напряжения и тока и средних значений активной и реактивной мощностей Discrete Active & Reactive Power из SimPowerSystem/ Extra Library/Discrete Measurements;
· блоки для наблюдения действующих значений фазного напряжения и тока двигателя, активной и реактивной мощности Scope1, угловой скорости двигателя и электромагнитного момента Scope и графопостроитель XY Graf из Simulink/Sinks;
· блоки для регистрации результатов моделирования w, Te, Uf / If, P/ Q из Simulink/Sinks/Display.

Рис.11.1. Схема модели для исследования асинхронного двигателя с фазным ротором
Подготовка модели к выполнению исследований
Объект исследования – асинхронный двигатель с фазным ротором. Тип двигателя и его каталожные данные для разных вариантов приведены табл.11.1.
Для заданного Вам варианта рассчитайте номинальный ток двигателя I n= Pn /(sqrt (3)* Un* ηn* cosfi), номинальную угловую скорость двигателя w n= nn * π/30), номинальный электромагнитный момент на валу двигателя Ten=Pn/ wn и номинальный момент сопротивления движению Tmn= Ten* sqrt( eff). Результаты расчета поместите в раздел «Результаты расчета» табл.11.1.
|
|
|
Таблица 11.1. Каталожные данные исследуемых двигателей
и результаты расчета параметров их моделей в MatLab
| N, вариант | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Тип двигателя | 4АК200 М4 | 4АК200 L4 | 4АК200 М6 | 4АК200 L6 | 4АК200 М8 | 4АК200 L8 | 4АК225 М4 |
| Каталожные данные | |||||||
| Pn, Вт | 22000 | 30000 | 18500 | 22000 | 15000 | 18500 | 37000 |
| Un, В | 380 | 380 | 380 | 380 | 380 | 380 | 380 |
| fn, Гц | 50 | 50 | 50 | 50 | 50 | 50 | 50 |
| sn, о.е. | 0.025 | 0.025 | 0.035 | 0.035 | 0.035 | 0.035 | 0.035 |
| eff, о.е. | 0.900 | 0.905 | 0.880 | 0.880 | 0.860 | 0.860 | 0.900 |
| cosfi, о.е. | 0.87 | 0.87 | 0.81 | 0.80 | 0.70 | 0.73 | 0.87 |
| kip, о.е. | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
| kmmax | 4.0 | 4.0 | 3.5 | 3.5 | 3.0 | 3.0 | 3.0 |
| Результаты расчета | |||||||
| Rs , Ом | 0.2778 | 0.1877 | 0.3282 | 0.2690 | 0.3793 | 0.3347 | 0.13 8 3 |
| Ls, Гн | 0.668e-3 | 0.493e-3 | 0.72e-3 | 0.598e-3 | 0.746e-3 | 0.631e-3 | 0.397e-3 |
| Rr, Ом | 0.1047 | 0.0777 | 0.1460 | 0.1198 | 0.1284 | 0.1133 | 0.0881 |
| Lr, Гн | 0.668e-3 | 0.493e-3 | 0.72e-3 | 0.598e-3 | 0.746e-3 | 0.631e-3 | 0.397e-3 |
| Lm, Гн | 32.69e-3 | 24.1e-3 | 29.6e-3 | 24.1e-3 | 25.16e-3 | 22.26e-3 | 19.4 4 e-3 |
| J, (кг*м^2) | 0.57 | 0.69 | 0.67 | 0.67 | 1.27 | 1.27 | 0.77 |
| Ff, N m s | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 |
| p | 2 | 2 | 3 | 3 | 4 | 4 | 2 |
| In, A | 42.69 | 57.89 | 39.43 | 47.48 | 37.86 | 44.77 | 71 . 8 |
| w, рад/с | 153.15 | 153.15 | 101.05 | 101.05 | 75.79 | 75.79 | 151 .58 |
| Te.n, Н*м | 143.65 | 195.88 | 183.07 | 217.7 | 197.91 | 244.09 | 244 .09 |
| Tm.n , Н*м | 136.28 | 186.35 | 171.73 | 204.22 | 183.54 | 226.36 | 231 .57 |
|
|
|
Параметры модели других двигателей могут быть рассчитаны по ниже приведенной программе [3]:
%Справочные данные- тип двигателя 4AK225M4
Pn=37000; Un=380; fn=50; sn=0.035; eff=0.9; cosfi=0.87; kip=6; kmmax=3; p=2; J=0.77;
%Параметры модели двигателя
Uf=Un/sqrt(3); no=60*fn/p; n=no*(1-sn); In=Pn/(3*Uf*eff*cosfi); w=pi*n/30; Ten=Pn/w; Tmn= Ten*sqrt(eff); sk=(kmmax+sqrt(kmmax^2-1))*sn;
for c=1.01:0.002:1.03;
Rr=1.015*Pn*sn/(3*In^2*(1-sn));
Rs=(Uf*cosfi*(1-eff)/In)-c^2*Rr-(0.015*Pn/(3*In^2));
L=Uf/(4*pi*fn*(1+c^2)*kip*In);
Ls=Uf/(2*pi*fn*In*sqrt(1-cosfi^2)-4*pi*fn*kmmax*Ten*sn/(3*p*Uf*sk));
Lm=Ls-L;c1=1+L/Lm;format short;
[Rs 1000*L Rr 1000*Lm c;
In w Ten Tmn c1]
Для расчета необходимо скопировать программу из папки MatLab/work/11ml/model_parameters.m в окно команд MatLab, ввести в программу вместо данных примера каталожные данные заданного Вам двигателя, дописать после скорректированной программы слово end , выбрать из результатов расчета строку, в которой значения с = с1 и выписать соответствующие этой строке значения параметров модели двигателя.
|
|
|
Откройте таблицу параметров модели источника питания 3- Phase Sourse иустановите:
· действующее значение линейного напряжения (B) 380;
· начальная фаза напряжения в фазе А (град) 0
· частота источника (Гц)] 50
· соединение фаз источника - Y g - звезда с заземленным нулевым проводом,
· активное сопротивление источника (Ом) 0.1, индуктивность 0.
Откройте таблицу параметров Asynchronous Machine и введите рассчитанные параметры модели заданного Вам двигателя (табл. 11.1):
· тип ротора Wound [фазный];
· система координат Stationary - неподвижная относительно статора.
· номинальная мощность Pn (ВА), действующее линейное напряжение Un (В) и номинальная частота fn (Гц) [ Pn, Un, fn];
· сопротивление Rs (Ом) и индуктивность Ls (Гн) статора [Rs, Ls];
· сопротивление Rr (Ом) и индуктивность Lr (Гн) ротора [R r, L r];
· взаимная индуктивность статора и ротора (Гн) [L m];
· момент инерции J (кг*м^2), коэффициент трения Ff (Н*м*с) и число пар полюсов p [J, F f, p]
Откройте таблицу параметров блока Discrete Active & Reactive Power иустановите Fundamental Frequency (основную частоту) 50.
Исследование механических характеристик двигателя
Механической характеристикой асинхронного электродвигателя называют зависимости угловой скорости ω от электромагнитного момента на валу двигателя Te при неизменных значениях напряжения источника питания и частоты.
Естественной механической характеристикой асинхронного электродвигателя с фазным ротором называют механическую характеристику, снятую при отключенном добавочном сопротивлении в цепи ротора.
Механическая характеристика может быть построена графопостроителем XY Graf или построена по показаниям дисплеев w и Te или осциллоскопу Scope.
Откройте таблицу параметров 3- Phase R и установите сопротивление R=0.001, индуктивность L=0, емкость С=inf.
Откройте таблицу параметров 3- Phase R_1 и установите сопротивление R=0.001, индуктивность L=0, емкость С=inf.
Откройте таблицу параметров 3- Phase Breaker и установите исходное состояние open (выключен)и время задержки до включения 10.
Откройте таблицу параметров источника линейно изменяющегося воздействия Ramp, иустановите:
· скорость изменения выходного сигнала (плита) 2*Tm n,
· время начала формирования сигнала 1
· начальный уровень сигнала на выходе блока 0.
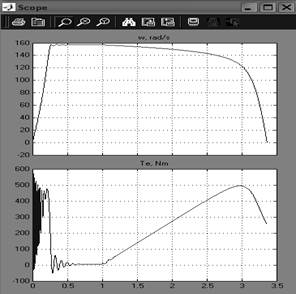
а) б)
Рис.11.2. Результаты моделирования естественной механической характеристики
Откройте Simulation/ Simulation parameter, задайте время моделирования 4, способ моделирования - с переменным шагом и метод расчета – ode 15 s , запустите моделирование ► и наблюдайте за текущим временем моделирования и экраном графопостроителя (рис.11.2,а).
Восходящая ветвь характеристики показывает процесс разгона двигателя. После пуска двигатель переходит в режим холостого хода и работает в этом режиме до t = 1 s. При 0.5< t<1 кнопкой ║ приостановите моделирование и запишите в табл.10.2 показания дисплеев Te и w для режима холостого хода двигателя Tm =0.
Кнопкой ► возобновите моделирование. При t > 1 s происходит плавное увеличение момента сопротивления движению Tm , соответствующее увеличение электромагнитного момента Tе и уменьшение угловой скорости w.
При Tе = Tе n кнопкой ║ вновь приостановите моделирование и запишите показания дисплеев для режима номинальной нагрузки
Аналогично возобновляйте, останавливайте моделирование и записывайте показания дисплеев при времени t=1.5, t=2, t=2.5, t=3, t=3.5, t=4, при времени когда момент достигает максимума Tе m и когда момент уменьшится до пускового Tе p (скорость вращения уменьшится до нуля).
Таблица 11.2. Естественная механическая характеристика двигателя
| t, s | 0.5<t<1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | ||
| Te, Nm | |||||||||
| ω, rad/s |
После завершения моделирования откройте осциллоскоп Scope, включите Автомасштаб и перерисуйте осциллограммы на бланк (рис.11.2,а и 11.2,б). Определите по осциллограммам зависимость Tе и w от времени, определитемаксимальное значение электромагнитного момента Tе m и критическую скорость wкр , определитепусковой момент Tе p при ω=0 и сравните их с данными табл.11.2.
Искусственной механической характеристикой асинхронного электродвигателя с фазным ротором называют механическую характеристику, снятую при включенном добавочном сопротивлении в цепи ротора. Это сопротивление выбирают по критериям ограничения пускового тока, увеличения пускового момента или регулирования скорости вращения двигателя.
Откройте таблицу параметров 3- Phase R_1 и, наблюдая за показаниями дисплея ISf, экспериментально определите добавочное сопротивление в цепи ротора, обеспечивающее ограничение пускового тока до 2* In.
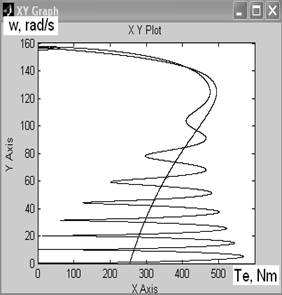
 Повторите моделирование, перерисуйте на бланк графики зависимостей угловой скорости от электромагнитного момента при выбранном дополнительном сопротивлении в цепи ротора (рис. 11.3,а и 11.3,б), заполните табл. 11.3 и постройте искусственную механическую характеристику двигателя.
Повторите моделирование, перерисуйте на бланк графики зависимостей угловой скорости от электромагнитного момента при выбранном дополнительном сопротивлении в цепи ротора (рис. 11.3,а и 11.3,б), заполните табл. 11.3 и постройте искусственную механическую характеристику двигателя.
 а) б)
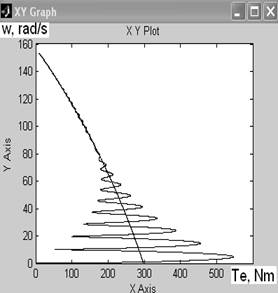
а) б)
Рис.11.3. Результаты моделирования искусственной механической характеристики
Таблица 11.3.Искусственная механическая характеристика двигателя (R=2)
| t, s | 0.5<t<1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | ||
| Te, Nm | |||||||||
| ω, rad/s |
Если по условиям регулирования скорости необходимо регулирующее сопротивление сделать меньше пускового, то часть пускового сопротивления, введенная в 3- Phase R_1, после пуска может быть выведена нормально разомкнутым выключателем 3- Phase Breaker. Дляпроверки правильности выбора величины дополнительных сопротивлений в цепи ротора необходимо блоком Constant задать постоянный момент сопротивления движению и провести моделирование (рис. 11.4,а и 11.4,б).

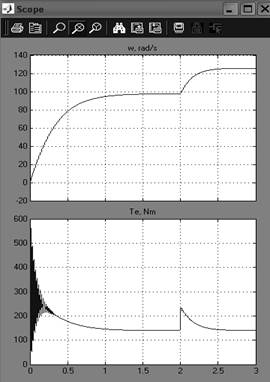
a) б)
Рис.11.3. Результаты моделирования двухступенчатой искусственной механической характеристики
Если по условиям регулирования скорости необходимо регулирующее сопротивление сделать больше пускового, то все пусковое сопротивление вводится в 3- Phase R, адополнительное регулирующее сопротивление вводится в 3- Phase R_1 и после пуска может быть введено в цепь ротора нормально замкнутым выключателем 3- Phase Breaker .
Дата добавления: 2021-02-10; просмотров: 227; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!