Задание № 2 . Кинематический анализ плоского механизма
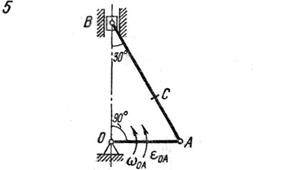
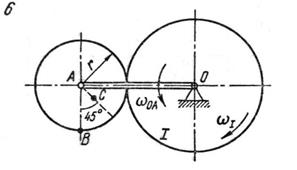
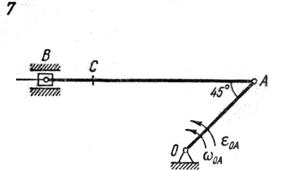
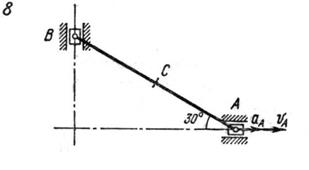
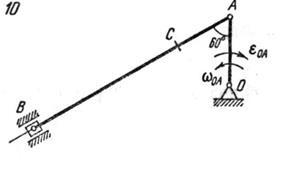
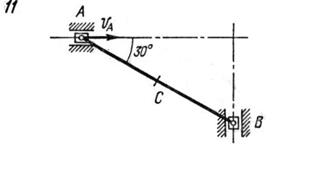
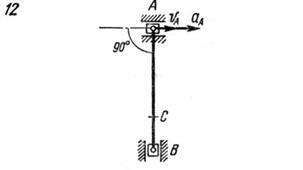
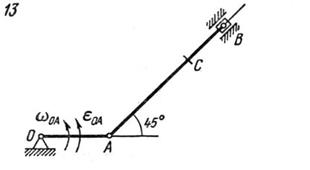
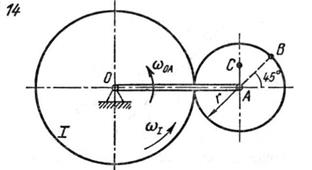
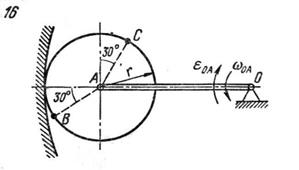
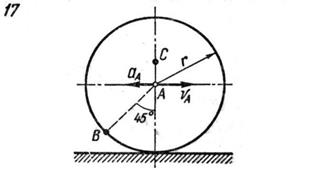
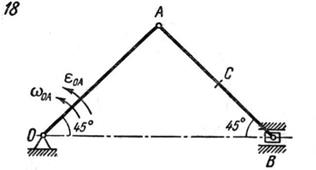
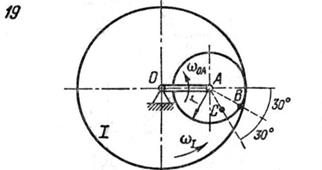
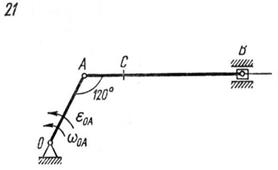
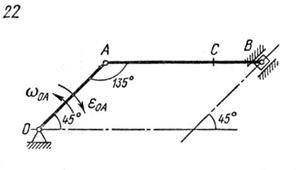
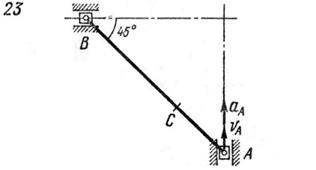
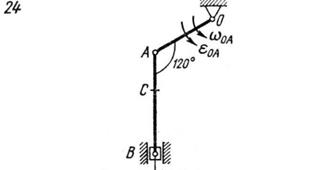
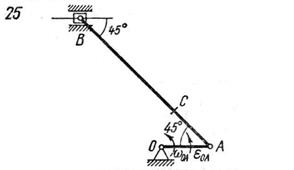
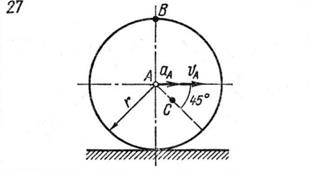
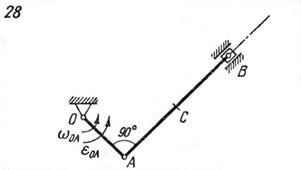
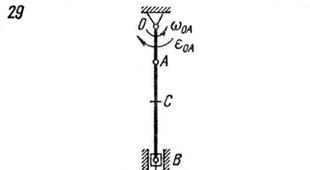
Найти для заданного положения механизма скорости и ускорения точек B и C, а также угловую скорость и угловое ускорение звена, которому эти точки принадлежат. Схемы механизмов помещены на рисунках, а необходимые для расчета данные приведены в табл. 2.
Таблица 2
| Номер варианта (рис. 1 - 30) | Размеры, см |
|
|
|
|
| |||
| OA | r | AB | AC | ||||||
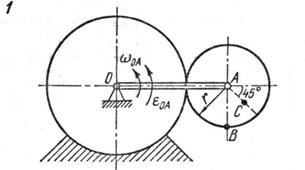
| 1 | 40 | 15 | - | 8 | 2 | - | 2 | - | - |
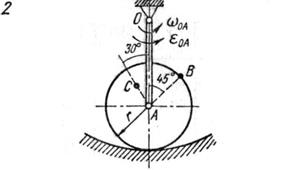
| 2 | 30 | 15 | - | 8 | 3 | - | 2 | - | - |
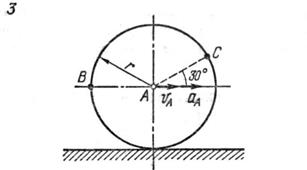
| 3 | - | 50 | - | - | - | - | - | 50 | 100 |
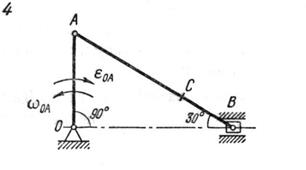
| 4 | 35 | - | - | 45 | 4 | - | 8 | - | - |
| 5 | 25 | - | - | 20 | 1 | - | 1 | - | - |
| 6 | 40 | 15 | - | 6 | 1 | 1 | 0 | - | - |
| 7 | 35 | - | 75 | 60 | 5 | - | 10 | - | - |
| 8 | - | - | 20 | 10 | - | - | - | 40 | 20 |
| 9 | - | - | 45 | 30 | - | - | - | 20 | 10 |
| 10 | 25 | - | 80 | 20 | 1 | - | 2 | - | - |
| 11 | - | - | 30 | 15 | - | - | - | 10 | 0 |
| 12 | - | - | 30 | 20 | - | - | - | 20 | 20 |
| 13 | 25 | - | 55 | 40 | 2 | - | 4 | - | 0 |
| 14 | 45 | 15 | - | 8 | 3 | 12 | 0 | - | 0 |
| 15 | 40 | 15 | - | 8 | 1 | - | 1 | - | 0 |
| 16 | 55 | 20 | - | - | 2 | - | 5 | - | 0 |
| 17 | - | 30 | - | 10 | - | - | - | 80 | 50 |
| 18 | 10 | - | 10 | 5 | 2 | - | 6 | - | - |
| 19 | 20 | 15 | - | 10 | 1 | 2,5 | 0 | - | - |
| 20 | - | - | 20 | - | - | - | 10 | 15 | |
| 21 | 30 | - | 60 | 15 | 3 | - | 8 | - | - |
| 22 | 35 | - | 60 | 40 | 4 | - | 10 | - | - |
| 23 | - | - | 60 | 20 | - | - | - | 5 | 10 |
| 24 | 25 | - | 35 | 15 | 2 | - | 3 | - | - |
| 25 | 20 | - | 70 | 20 | 1 | - | 2 | - | - |
| 26 | 20 | 15 | - | 10 | 2 | 1,2 | 0 | - | - |
| 27 | - | 15 | - | 5 | - | - | - | 60 | 30 |
| 28 | 20 | - | 50 | 25 | 1 | - | 1 | - | - |
| 29 | 12 | - | 35 | 15 | 4 | - | 6 | - | - |





Примечание:  и
и  - угловая скорость и угловое ускорение кривошипа OA при заданном положении механизма;
- угловая скорость и угловое ускорение кривошипа OA при заданном положении механизма;  - угловая скорость колеса I (постоянная);
- угловая скорость колеса I (постоянная);  и
и  - скорость и ускорение точки A. Качение колес происходит без скольжения.
- скорость и ускорение точки A. Качение колес происходит без скольжения.
Рисунки механизмов (для вариантов № 1 – 29)
| 
|
| 
|
| 
|
| 
|

| 
|
| 
|
| 
|

| 
|
| 
|
| 
|
| 
|
| 
|
| 
|
| 
|
|
Пример выполнения задания
Дано: схема механизма в заданном положении (рис. 2), исходные данные таковы, что OA = 40 см, AC = 20 см, ω OA = 5 рад/с, ε OA = 10 рад/с2.
Найти:  .
.
Решение: 1) Определение скорости точек и угловой скорости звена AB:
 вычисляем модуль скорости точки A при заданном положении механизма:
вычисляем модуль скорости точки A при заданном положении механизма:
Скорость точки А перпендикулярна кривошипу ОА. Скорость ползуна В направлена вдоль ОВ. Мгновенный центр скоростей PAB шатуна АВ находится в точке пересечения перпендикуляров, проведенных из точек A и B к их скоростям.
Угловая скорость звена AB:
 .
.
Расстояния АРАВ, ВРАВ и СРАВ определяются из рассмотрения треугольников АСРАВ и АВРАВ :
AP АВ = OA=40 см, В P АВ =  см, С P АВ =
см, С P АВ =  см.
см.
В соответствии с этим  ,
,  ;
;  ;
;  .
.
Вектор  направлен перпендикулярно отрезку СРАВ в сторону, соответствующую направлению вращения звена АВ.
направлен перпендикулярно отрезку СРАВ в сторону, соответствующую направлению вращения звена АВ.
2) Определение ускорений точек и углового ускорения звена AB (рис. 4).
Ускорение точки A складывается из вращательного и центростремительного ускорений:
 ,
,
где  ,
,  .
.
Согласно теореме об ускорениях точек плоской фигуры:

или
 . (1)
. (1)
 Вектор
Вектор  направлен от A к О. Вектор
направлен от A к О. Вектор  перпендикулярен вектору
перпендикулярен вектору  и направлен в сторону, противоположную
и направлен в сторону, противоположную  , (т.к. из условия задачи движение кривошипа OA замедленное).
, (т.к. из условия задачи движение кривошипа OA замедленное).
Центростремительное ускорение точки B во вращательном движении шатуна AB вокруг полюса A:  и направлено от B к A.
и направлено от B к A.
Ускорение  направленно вдоль линии OB, а
направленно вдоль линии OB, а  . Зададим произвольно их направления:
. Зададим произвольно их направления:  - вертикально вверх, - от B к O. Эти ускорения определим из уравнений проекций векторного равенства (1) на оси координат. Знак в ответе показывает, соответствует ли истинное направление вектора принятому при расчете.
- вертикально вверх, - от B к O. Эти ускорения определим из уравнений проекций векторного равенства (1) на оси координат. Знак в ответе показывает, соответствует ли истинное направление вектора принятому при расчете.
Выбрав направление осей x и y, как показано на рис. 4, получаем:
 , (2)
, (2)
 . (3)
. (3)
Из уравнения (2) находим
 .
.
Из уравнения (3) получаем

Следовательно, ускорение  направлено так, как показано на рисунке, а
направлено так, как показано на рисунке, а  – в противоположную сторону. Истинная картина ускорений для точки B показана на рис. 5.
– в противоположную сторону. Истинная картина ускорений для точки B показана на рис. 5.
Угловое ускорение шатуна AB будет:
 ;
;
 Направление относительно полюса A определяет направление углового ускорения
Направление относительно полюса A определяет направление углового ускорения  . В данном случае, не совпадает с направлением
. В данном случае, не совпадает с направлением  , следовательно, движение звена замедленное.
, следовательно, движение звена замедленное.
Определим ускорение точки C:
 .
.
Вращательное и центростремительное ускорения точки C во вращательном движении AB вокруг полюса A:
 ;
;  .
.
Вектор  перпендикулярен вектору
перпендикулярен вектору  и направлен соответственно угловому ускорению
и направлен соответственно угловому ускорению  .
.
Ускорение  находим методом проекций (рис. 6):
находим методом проекций (рис. 6):

 ,
,  ,
,
 .
.
В результате вычислений получаем:
 ,
,
 ,
,
Литература
1. Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 1995. – 415 с.
2. Яблонский А.А. Курс теоретической механики. – М.: Высшая школа, 1971. – ч. 1. – 275 с.
3. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. – М.: Наука, 1971. – ч. 1. – 460 с.
4. Добронравов В.В., Никитин Н.Н. Курс теоретической механики. – М.: Высшая школа, 1983. – 532 с.
5. Сборник заданий для курсовых работ по теоретической механике. Учеб.пособие для ВУЗов./ Под ред. Яблонского А.А. и др. – М.: Высшая школа, 1985. – 367 с.
6. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. – М.: Физматгиз, 1961. – ч.1. – 457 с.
7. Мещерский Н.В. Сборник задач по теоретической механике. – М.: Наука, 1971. – 450 с.
Дата добавления: 2021-02-10; просмотров: 551; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!