Проекция скоростей двух точек тела
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
СТЕРЛИТАМАКСКИЙ ФИЛИАЛ
ФЕДЕРАЛЬНОГО ГОСУДАРСТВЕННОГО БЮДЖЕТНОГО
ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ ВЫСШЕГО ОБРАЗОВАНИЯ
«БАШКИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
ЕСТЕСТВЕННОНАУЧНЫЙ ФАКУЛЬТЕТ
КАФЕДРА ХИМИИ И ХИМИЧЕСКОЙ ТЕХНОЛОГИИ
РЕФЕРАТ
ПРОЕКЦИИ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ НА ОСЬ,
ПРОХОДЯЩУЮ ЧЕРЕЗ ЭТИ ТОЧКИ
| Выполнил: студент гр. ZSХТ-22 Дадаханова Диана Рустамовна Проверил: старший преподаватель Кирюхин А.Ю. |
СТЕРЛИТАМАК – 2020
СОДЕРЖАНИЕ
ВВЕДЕНИЕ……..…………...…………………………………………………….…3
ГЛАВА 1. СТАТИКА…………...……………………..…………………………….4
1.1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ…....………..……………………...…………..4
ГЛАВА 2. ТЕОРЕМА ОПРЕДЕЛЕНИЯ……………………………………………6
2.1.ПРОЕКЦИЯ СКОРОСТЕЙ ДВУХ ТОЧЕК ТЕЛА………………………….....6
ЗАКЛЮЧЕНИЕ…………...……………………………………………...…………9
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ…………......………………..10
ВВЕДЕНИЕ
Любая теория представляет собой подчинённую правилам логического вывода систему категорий, связанных друг с другом аксиомами. Все выводы теории оказываются справедливыми и для реальных объектов, если сопоставленные им категории оказываются в тех же соотношениях, какие предписывают аксиомы. Из всего многообразия проявлений реальности теоретическая механика выделяет простейшие, называемые механическими, и, сопоставляя этим проявлениям соответствующие категории с правилами их исчисления, строит математическую модель, описывающую свойства рассматриваемого явления. В таком контексте теоретическая механика представляет собой метод математического моделирования свойств различных проявлений реальности. Поскольку сопоставления (свойства реальных объектов – категории) распространяются лишь на ограниченное количество явлений и имеют место только при выполнении определённых условий, практика постоянно ставит перед теорией задачу математического описания новых технологических процессов, задачу математического описания взаимодействия хорошо изученных объектов в новых условиях. В связи с этим цель настоящего пособия – обратить внимание на возможность описания экспериментальных фактов с единой позиции методами алгебры.
|
|
|
ГЛАВА 1. СТАТИКА
Основные определения
Одним из основных понятий механики является понятие о силе. Сила является количественной мерой механического взаимодействия и характеризует интенсивность и направление этого взаимодействия. Таким образом, сила является векторной величиной. В качестве примеров сил можно назвать силу притяжения к Земле, всевозможные контактные силы, например, давление на опоры сооружения, силы, возникающие из-за сопротивления среды. Статикой называют раздел механики, в котором изучают эквивалентные преобразования систем сил, приложенных к твердому телу, и условия их равновесия. Статика основана на ряде законов и аксиом, которые считаются очевидными истинами и принимаются без математических доказательств. Эти законы и аксиомы являются результатом обобщения многочисленных опытных данных. И хотя их проверка не всегда может быть осуществлена непосредственно, следствия, которые из них вытекают, подтверждаются наблюдениями. К числу общих законов механики, на которых основана статика, относится закон инерции, открытый Галилеем, - первый закон Ньютона. Закон утверждает, что всякое тело должно находиться в состоянии покоя или равномерного прямолинейного движения, пока это состояние не будет изменено действующими на тело силами. Ньютон, формулируя закон инерции, ничего не говорил о размерах тела, полагая, что под телом следует понимать материальную точку. Другим основным законом механики, на котором основана статика, является закон о равенстве действия и противодействия - третий закон Ньютона. Силы взаимодействия двух материальных точек равны по величине и противоположны по направлению и действуют по одной прямой. Система сил, действующих на материальную точку, считается уравновешенной, если материальная точка движется равномерно и прямолинейно или находится в состоянии покоя. Система материальных точек находится в равновесии, если каждая ее материальная точка находится в равновесии. Система сил, приложенных к твердому телу, находится в равновесии, если она своим действием не изменяет состояние покоя или равномерного движения этого тела. Две системы сил, действующих на абсолютно твердое тело, называются эквивалентными, если каждая из них порознь уравновешивает одну и ту же третью систему сил [1].
|
|
|
|
|
|
ГЛАВА 2. ТЕОРЕМА ОПРЕДЕЛЕНИЯ
Проекция скоростей двух точек тела
Теорема: проекции скоростей двух точек плоской фигуры на ось, проходящую через эти точки, равны.

VMх =VAх или V MA cosβ =VA cosα.
Мгновенный центр скоростей.
Определение скоростей точек и угловой скорости плоской фигуры с помощью мгновенного центра скоростей.
Мгновенным центром скоростей (МЦС) называется точка Р плоской фигуры, скорость которой в данный момент времени равна нулю (Vp=0).
|
|
|
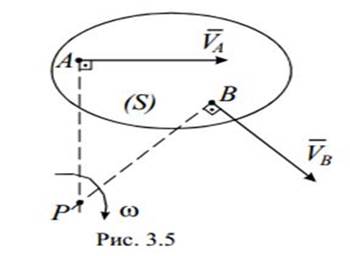
Скорость любой точки тела, лежащей в сечении S, равна вращательной скорости точки вокруг мгновенного центра скоростей Р. МЦС является центром вращения плоской фигуры (сечения S) в данный момент времени и находится в точке пересечения перпендикуляров АР и ВР, восстановленных в точках А и В к их скоростям VA и VB [2].
VA/VB=AP/BP => Скорости точек плоской фигуры пропорциональны их расстояниям до мгновенного центра скоростей.
Из соотношений VA=w AP и VB=w BP можно определить угловую скорость тела при плоском движении : w= VA/ AP
Угловая скорость плоской фигуры в каждый момент времени равна отношению скорости любой точки плоской фигуры к её расстоянию до мгновенного центра скоростей.
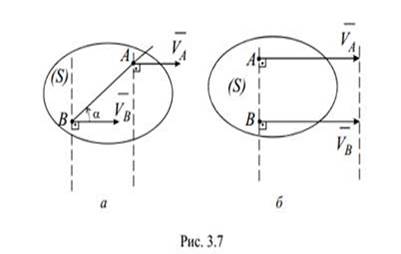
Способы определения положения мгновенного центра скоростей.
Некоторые частные случаи:
1. Если VA‖‖VB, и ⊥АВ
2. Если VA‖‖VB, и не ⊥АВ или VA‖‖VB, VA=VB и ⊥АВ, то ω=0, VA=VB, VA= VB мгновенно- поступательное распределение скоростей
3. При качении одного цилиндрического тела по поверхности другого неподвижного тела точка касания Р катящегося тела о неподвижную поверхность является МЦС в данный момент ω=Vс/R;

4. VA,ω, АР, которое определяется равенством : Ap=VA/ ω
Теорема об ускорениях точек плоской фигуры.
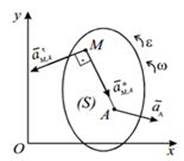
Т: а любой точки плоской фигуры= геометрической сумме а полюса и а точки во вращении вокруг полюса.
 ;
; 
ЗАКЛЮЧЕНИЕ
В связи с тем, что многие физические понятия по своей природе являются неясными и значительная часть нашего мышления происходит в подсознательной области разума, построение механики как раздела математики следует начинать с аксиоматического обоснования (построения системы аксиом). Признавая существование объективной реальности, мы постулируем понятия о пространстве и времени, необходимые для ее описания. Эти понятия – исходные для понимания классической механики. Они были определены И. Ньютоном в его знаменитом труде Philosophiæ naturalis principia mathematica («Математические начала натуральной философии», 1687). «Абсолютное, истинное математическое время само по себе и самой своей сущностью, без всякого отношения к чему-либо внешнему, протекает равномерно и иначе называется длительностью ...» «Абсолютное пространство по самой своей сущности, безотносительно к чему-либо внешнему, остается всегда одинаковым и неподвижным ...» [3].
Дата добавления: 2021-02-10; просмотров: 69; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!