Тема 6.7. Методы автоматизации регулирования мощности дуговых печей.
Для обеспечения нормальной высокопроизводительной работы дуговые печи оборудуются автоматическими регуляторами мощности, которые осуществляют постоянство температурного режима печи путем изменения длины дуги. Исполнительным устройством таких САР является двигатель постоянного тока, вал которого через передаточный механизм перемещает электрод в вертикальном направлении, причем каждый электрод имеет свою систему регулирования, т.е. перемещается независимо.
Практически выяснено, что в мощных дугах ток дуги зависит в основном от длины дуги ℓд. При относительном постоянстве фазных напряжений можно утверждать, что ток дуги Iд увеличивается при уменьшении длины дуги и уменьшается при увеличении длины дуги. В результате меняется и мощность дуги, а значит и температура в печи.
Таким образом, процесс автоматизации регулирования мощности дуги можно охарактеризовать одним параметром:
А = а ·Iд - b·Uф,
где Iд  ток дуги;
ток дуги;
Uф фазное напряжение питающей сети;
а, b  коэффициенты пропорциональности.
коэффициенты пропорциональности.
Для того, чтобы в данный момент времени мощность дуги была заданной, коэффициенты а и b подбираются таким образом, чтобы разность сигнала с датчика тока дуги и сигнала с датчика фазного напряжения равнялась бы нулю:
А = а ·Iд - b·Uф = 0,
где а ·Iд - сигнал обратной связи по току дуги;
b·Uф - сигнал обратной связи по фазному напряжению.
Теперь любое отклонение мощности от заданного режима вызовет изменение одного из составляющих параметра А. В результате появляется сигнал рассогласования с соответствующим знаком Uр = ± А и немедленная реакция САР на этот сигнал.
Воздействуя на исполнительный двигатель, САР автоматически обеспечит перемещение электрода в том направлении, в котором заданный режим вновь восстановится. При этом электрод будет перемещатся до тех пор, пока вновь составляющие параметра А не станут равными, а значит их алгебраическая сумма станет вновь равна нулю.
Для исключения автоколебательного режима работы данной САР необходимо обеспечить зону нечувствительности по току дуги в пределах  10 % от номинального тока дуги.
10 % от номинального тока дуги.
САР должна обладать высоким быстродействием, обеспечивая ликвидацию крупных нарушений заданного режима в течение 0,5 – 1,5 сек (например, в случаях короткого замыкания электрода с металлом или обрыва дуги). Кроме этого САР должна осуществлять автоматическое зажигание дуги и плавное регулирование задаваемой мощности дуги в диапазоне 20 – 125 % от номинальной мощности дуги.
Тема 6.8. Схема и принцип работы автоматического регулятора мощности дуги АРДМТ (автоматический регулятор дуги, механическая передача, с тиристорным управлением).
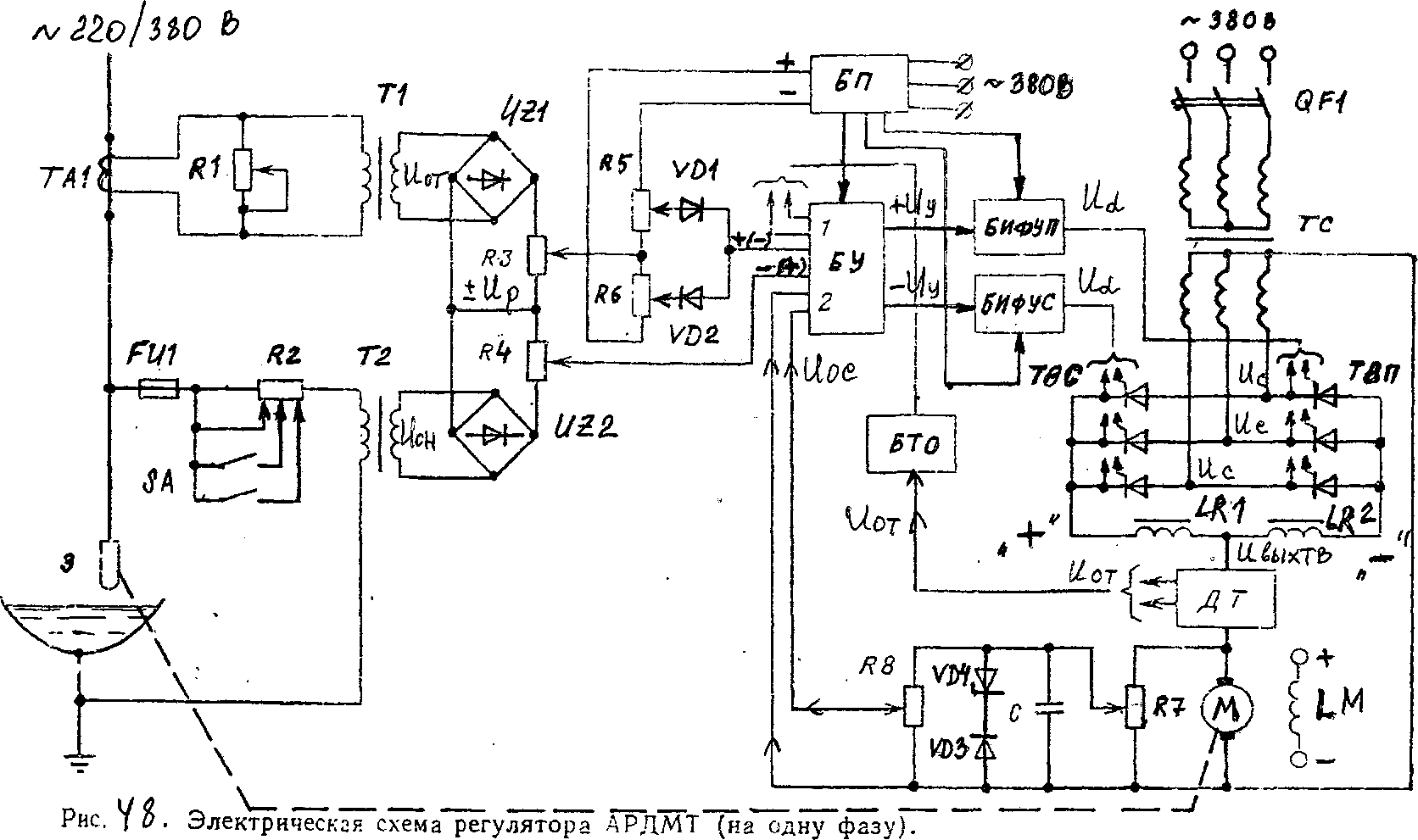
В регуляторе применяется САР с малоинерционным двигателем М постоянного тока независимого возбуждения типа ПБСТ и ПГТ мощностью от 1÷11 кВт. Вал двигателя соединяется через механическую передачу с электродом Э (рис.48). Обмотка якоря двигателя М получает питание от реверсивного тиристорного управляемого выпрямителя (ТУВ), состоящего из двух групп тиристоров :
группа ТВС- работает на спуск электрода;
группа ТВП- работает на подъем электрода.
Обмотка возбуждения двигателя LМ получает питание от отдельного неуправляемого выпрямителя на полупроводниковых диодах).
ТУВ выполнен по трехфазной нулевой схеме и питается переменным трехфазным напряжением Uс от печного трехфазного трансформатора ТС. На выходе ТУВ установлены два сглаживающих дросселя LR1 и LR2, эти дроссели также выполняют роль уравнительных реакторов, которые предотвращают возникновение больших уравнительных токов между тиристорами ТВС и ТВП во время переходных процессов.
Датчиками мощности дуги служат:
а) трансформатор тока ТА1, напряжение со вторичной обмотки которого (сигнал обратной связи по току дуги а·Iд = Uот) через согласующий трансформатор Т1 подается на выпрямитель UZ1. Для подбора коэффициента а служит переменный резистор R1, включенный параллельно вторичной обмотке трансформатора ТА1 (шунтирующий эту обмотку);
б) трансформатор напряжения Т2, на первичную обмотку которого подается фазное напряжение Uф, а со вторичной обмотки снимается сигнал обратной связи по фазному напряжению b·Uф = Uон. Этот сигнал подается на выпрямитель UZ2. Коэффициент b подбирается с помощью переменного резистора R2 и переключателя SA1, которые включены последовательно с первичной обмоткой Т2.
Сигнал рассогласования ± Uр = ± А = Uот - Uон между ползунками резисторов R3 и R4, которые служат сравнивающим устройством.
Если хотя бы одно из слагаемых а·Iд или b·Uф отличаются от заданных, то их разность в виде сигнала рассогласования через ползунки переменных резисторов R3 и R4, резисторы R5 или R6, диоды VD1 или VD2 поступают на вход блока управления БУ. С выхода БУ снимается напряжение управления Uу, которое поступает на блоки импульсно-фазового управления БИФУП и БИФУС. В зависимости от знака напряжения на входе БУ(+ или -) работает один из этих двух блоков - БИФУП или БИФУС, а значит открываются тиристоры соответствующего управляемого выпрямителя ТВП или ТВС, подавая напряжение на якорь двигателя М. Направление вращения двигателя будет зависит от полярности выходного напряжения выпрямителя Uвых.тв, а скорость его вращения – от величины угла  - угол между началом координат и моментом возникновения короткого прямоугольного положительного импульса на выходе БИФУП или БИФУС (см. диаграммы работы БИФУ).
- угол между началом координат и моментом возникновения короткого прямоугольного положительного импульса на выходе БИФУП или БИФУС (см. диаграммы работы БИФУ).
Поскольку «-» от блока питания БП через ползунок резистора R5 подключен к аноду VD1( p - область), а «+» через ползунок R6 к катоду VD2 (n- область), то всегда можно с помощью ползунков резисторов R5 и R6 подобрать такое напряжение, поступающее на диоды VD1 и VD2, чтобы они были заперты. Запертое состояние диодов будет продолжаться до тех пор, пока сигнал рассогласования, поступающий на общую точку резисторов R5 и R6 не превысит напряжение запирания диодов. Только в этом случае сигнал рассогласования поступит на вход БУ. Если этот сигнал положителен, то он поступает на вход БУ через R5 и VD1, а если отрицателен - то через R6 и VD2. Таким образом, перемещая ползунки R5 и R6 можно регулировать ширину зоны нечувствительности САР в зависимости от Iном дуги.
В исходном состоянии печь работает в установившемся (заданном) режиме мощности, при этом САР находится в равновесии, тиристоры управляемого выпрямителя ТВП и ТВС заперты, двигатель М и электрод Э неподвижны.
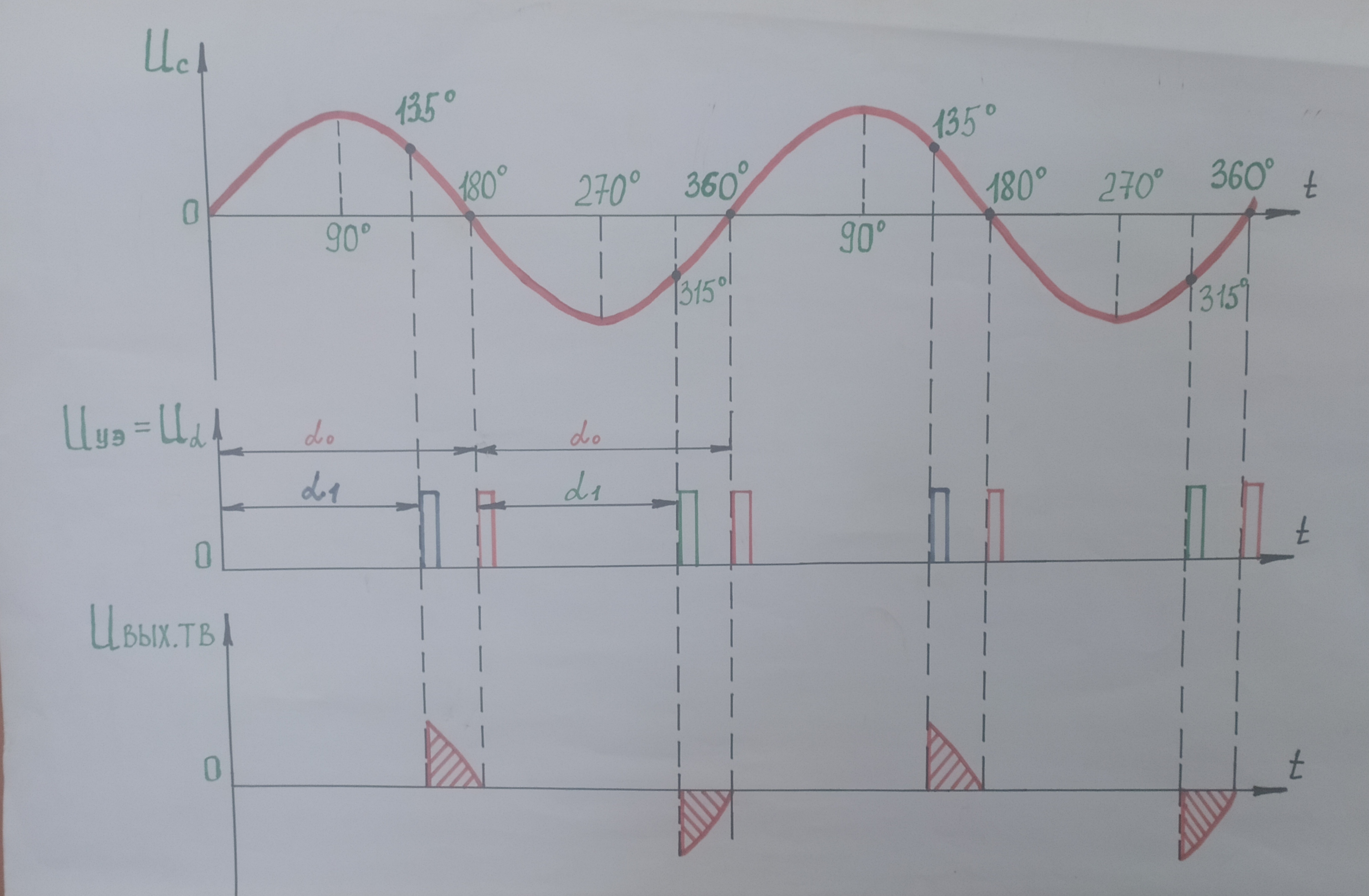
Рис.48, а. Диаграммы работы БИФУ.
Предположим, что длина дуги уменьшилась, а ток дуги увеличился, в результате появилось напряжение рассогласования с положительным знаком: + Uр = ↑Uот - Uон . При достаточном уровне этого сигнала открывается диод VD1 и сигнал поступает на блок управления БУ. БУ вырабатывает положительное напряжение управления +Uу, пропорциональное + Uр , которое поступает на БИФУП. На выходе БИФУП угол импульсов, поступающих на управляющие электроды тиристоров ТВП уменьшается (например с 360º до 315º). В результате тиристоры ТВП открываются, на двигатель подается отрицательное значение Uвых.тв и двигатель перемещает электрод Э вверх (при этом длина дуги увеличивается, а ток дуги уменьшается). Это перемещение будет продолжаться до тех пор, пока сигнал рассогласования вновь не станет равным нулю, т.е. ток дуги вновь станет равным заданному.
После этого печь снова работает в установившемся (заданном) режиме мощности, при этом САР находится в равновесии, тиристоры управляемого выпрямителя ТВП и ТВС заперты, двигатель М и электрод Э неподвижны.
Аналогичный процесс будет происходить и при увеличении длины дуги (уменьшении тока дуги).
В схеме используется жесткая обратная связь по напряжению якоря двигателя М. Датчиком напряжения в цепи обратной связи служит резистор R7, включенный параллельно обмотке якоря. С ползунка этого резистора сигнал отрицательной обратной связи поступает на вход блока управления (вход 2) с полярностью, противоположной полярности сигнала рассогласования. При этом увеличение напряжения обратной связи Uосд (увеличение напряжения питания на якоре) вызовет уменьшение напряжения на входе БУ:
 -
-  .
.
Это вызовет уменьшение напряжения управления на входе БИФУ, угол открывания тиристоров увеличится, а значит выходное напряжение  ТВС или ТВП уменьшится, при этом якорь двигателя будет вращаться с заданной скоростью с моментом и током не превышающих допустимых значений. Такая отрицательная обратная связь улучшает работу САР при резких колебаниях напряжения сети, а также повышает быстродействие САР в случаях замыкания электрода с металлом. Требуемый уровень обратной связи ( величину Uосд ) подбирают перемещением ползунка резистора R8.
ТВС или ТВП уменьшится, при этом якорь двигателя будет вращаться с заданной скоростью с моментом и током не превышающих допустимых значений. Такая отрицательная обратная связь улучшает работу САР при резких колебаниях напряжения сети, а также повышает быстродействие САР в случаях замыкания электрода с металлом. Требуемый уровень обратной связи ( величину Uосд ) подбирают перемещением ползунка резистора R8.
При резком увеличении напряжения на якоре двигателя в первый момент времени (1 микросекунда) напряжение обратной связи Uосд также возрастет. Как только оно превысит напряжение пробоя стабилитрона VD4, он пробивается, в результате Uосд останется ограниченным на уровне напряжения стабилизации VD4.
Кроме этого, в схеме присутствует отрицательная обратная связь по току двигателя. Датчиком тока ДТ является шунт (резистор небольшого сопротивления), который включается последовательно в цепь обмотки якоря двигателя. Падение напряжения на этом шунте и будет являться напряжением обратной связи по току двигателя Uотд. Иногда совместно с шунтом используется операционный усилитель, увеличивающий этот сигнал. Если ток двигателя превышает допустимое значение, то сигнал, поступающий с датчика тока на блок токоограничителя БТО поступает на вход 1 блока управления БУ в полярности, противоположной полярности напряжения рассогласования . В дальнейшем схема работает аналогично вышеизложенному: (  ,
,  , ↑,
, ↑,  ).
).
Практическая работа № 6
ЗАЧЕТ ПО МОДУЛЮ 6
Дата добавления: 2021-02-10; просмотров: 229; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!