Описание лабораторной установки
Устройство и принцип действия датчика тока
Датчик тока предназначен для того, чтобы передать в систему автоматического управления сигнал, пропорциональный току тягового двигателя. По условиям электробезопасности система управления должна быть изолирована от силовой цепи электровоза. Поэтому в качестве датчика тока используют трансформатор постоянного тока (ТПТ), который состоит из двух ферромагнитных сердечников сечением S с одинаковыми обмотками, называемыми рабочими (рис.1). Число витков каждой рабочей обмотки обозначено w р, а ее сопротивление – rp . К обмоткам подведено переменное синусоидальное напряжение U, создающее переменный рабочий ток iр. Последовательно с обмотками, через выпрямительный мост включен резис-тор r. Падение напряжения ur = r · iр на этом резисторе является выходным сигналом датчика тока.
В отверстия сердечников пропущен силовой кабель, который образует входную обмотку датчика с числом витков w. По этой обмотке протекает ток I силовой цепи, называемый входным током.
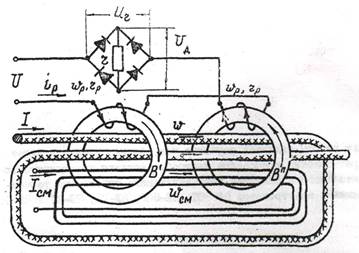
Рис.1.
На рис.1 показана также обмотка смещения с числом витков w см, охватывающая оба сердечника.
Сердечники датчика выполнены из пермаллоя, или высокотекстурованной электротехнической стали. Характеристика перемагничивания этих материалов близка к прямоугольной; в упрощенном виде она показана на рис.2. Действующее значение синусоидального напряжения U, от которого питаются рабочие обмотки, выбирают так, чтобы при токе силовой цепи I = 0 амплитуда магнитной индукции в сердечниках В max была немного меньше индукции насыщения Вн.
|
|
|
U = 2 · 4,44 · f · w р · В max · S . (1)
Рис.2.
При этом сердечники находятся в состоянии перемагничивания, соответствующем вертикальному участку кривой намагничивания (см. рис.2), магнитная проницаемость сердечников очень высока, а напряженность магнитного поля Н в сердечниках и ток намагничивания пренебрежимо малы. Условно можно принять положительным то направление индукции В, которое соответствует показанному на рис.1 направлению тока в рабочей обмотке iр. Поскольку рабочие обмотки обоих сердечников включены встречно, то положительные направления индукции в сердечниках будут противоположны; это показано на рис.1 стрелками.
При одновременном протекании переменного тока iр по рабочей обмотке и постоянного тока I по входной обмотке возможны два случая:
1. Намагничивающие силы входной и рабочей обмоток одного из сердечников направлены встречно.
Сердечник остается в состоянии перемагничивания. Напряжение на рабочей обмотке перемагничивающегося сердечника
|
|
|
u рп = rp · i р + w р · S · dB/dt.
Поскольку магнитная проницаемость сердечника при этом очень велика, то ЭДС – w р · S · dB/dt , индуктируемая в рабочей обмотке, имеет достаточную величину, чтобы поддержать в рабочей обмотке такое значение тока iр, при котором алгебраическая сумма намагничивающих сил входной и рабочей обмоток равна нулю:
∫ H · dl = iр · w р – I · w = 0. (2)
Отсюда следует, что в процессе перемагничивания сердечника мгновенное значение рабочего тока остается неизменным и равным
i р = I · w/w р = const. (3)
2. Намагничивающие силы входной и рабочей обмоток складываются. Сердечник переходит в состояние насыщения, соответствующее одному из горизонтальных участков кривой намагничивания (см. рис.2). При этом магнитная индукция в сердечнике B = B н остается постоянной независимо от величины токов i р и I в обмотках этого сердечника. Напряжение на рабочей обмотке насыщенного сердечника
u рн = rp · i р + Ls · di р/dt ,
где L s – индуктивность рассеяния рабочей обмотки.
Поскольку рабочие обмотки двух сердечников соединены между собой встречно, то при I = 0 в каждый момент времени намагничивающие силы обмоток у одного из сердечников вычитаются, а у другого – суммиру-ются. Следовательно, когда один из сердечников перемагничивается, другой в это время находится в состоянии насыщения.
|
|
|
Рассмотрим процесс изменения магнитного состояния сердечников при работе датчика тока.
На рис.3,а показано синусоидальное напряжение, приложенное к цепи рабочей обмотки.
Рис.3
Пусть в некоторый момент времени ω · t = α первый сердечник начинает перемагничиваться, второй находится в состоянии насыщения. При этом ток в цепи рабочих обмоток, определяемый формулой (3), остается постоянным в течение всего процесса перемагничивания (рис. 3,б).
Напряжение u, приложенное к рабочей цепи, уравновешивается напряжениями на рабочих обмотках первого и второго сердечников и на резисторе r :
u = u рп + u рн + ur = (2 rp + r ) · i р + w р · S · dB ’/dt + L s · di р/dt . (4)
Падение напряжения на активных сопротивлениях рабочей цепи (2 rp + r ) · i р показано на рис.3,а. Ординаты заштрихованной площади соглас-но уравнению (4) равны w р · S · dB ’/dt поскольку di р/dt = 0. В момент време-ни ω · t = α u > (2 rp + r ) · i р и dB ’/dt > 0. Магнитная индукция в сердечнике начинает изменяться от величины –Вн в сторону положительных значений (рис.3,в). Такое изменение B ’ продолжается до момента времени t 1, когда будет выполнено условие u = (2 rp + r ) · i р. Величина изменения индук-ции ∆B пропорциональна вертикально заштрихованной площади на интервале от α до ω · t 1 (рис.3,а).
|
|
|
При t > t 1 мгновенное значение напряжения продолжает снижаться к u < (2 rp + r ) · i р. Поскольку w р · S · dB ’/dt < 0, индукция В’ начинает изме-няться в сторону отрицательных значений В. В конце перемагничивания индукция в сердечнике достигает величины –Вн. Это произойдет, когда отрицательная наклонно заштрихованная площадь будет равна положитель-ной вертикально заштрихованной площади, соответствующей интервалу ( ω · t 1 – α).
В момент времени t 2 оба сердечника будут насыщены, и уравнение равновесия напряжений в рабочей цепи приобретет вид
u = 2 u рн + ur = (2 rp + r ) · i р + 2 L s · di р/dt . (5)
В этот момент времени мгновенное значение напряжения имеет противоположную полярность по сравнению с моментом времени α. Поэтому ток рабочей обмотки быстро изменяет свое направление в соответствии с полярностью напряжения u.
Согласно равенству (4) скорость изменения тока ограничивается достаточно малой индуктивностью рассеяния обмоток Ls. Изменение тока заканчивается в момент времени t 3 , когда ток достигает величины I · w / w р , при которой начинает перемагничиваться второй сердечник (рис.3,г). Далее процесс повторяется.
Кривая изменения рабочего тока (рис.3,б) близка по форме к прямо-угольной и отстает по фазе от питающего напряжения на угол α. С увеличением входного тока согласно формуле (3) возрастает рабочий ток. При этом уменьшается величина заштрихованных площадей и, следова-тельно, уменьшается глубина размагничивания сердечников ∆В (см. рис.3,в). Зависимость угла α от величины входного тока можно получить из условия равенства положительных и отрицательных заштрихованных площадей за полупериод (рис.3,а):
∫ w р · S · dB = ∫ [ u – (2rp + r) · i р ] · dωt = 0.
Полагая, что промежуток времени (t 3 – t 2), когда оба сердечника насыщены, достаточно мал, можно принять ω · t 2 = ω · t 3 = α +π . Взяв интег-рал и используя формулу (3), получим
α = arccos([π · (2rp + r) · I · w]/[2  · U · w р ]). (6)
· U · w р ]). (6)
Отсюда следует, что наибольшее значение α = π /2соответствует I = 0. По мере увеличения входного тока угол αуменьшается.
Выходным сигналом тока является выпрямленное падение напряжения на резисторе:
U д = r · i р = r · I · w/w р . (7)
При изменении направления рабочего тока входное напряжение имеет провалы, показанные на рис.3,д штриховой линией. Для сглаживания этих провалов используют выходной фильтр (рис.5), состоящий из конденсатора Сф и резистора r ф.
2. Статическая характеристика датчика тока
Статической характеристикой датчика тока называется зависимость между выходным и входным сигналами в установившемся режиме.
Согласно формуле (7) зависимость U д(I) имеет вид прямой, проходя-щей через начало координат, как это показано на рис.4 штрихпунктирной линией.
Рис.4
Характеристика реального датчика имеет ряд отличий от идеальной.
1. Выходной сигнал датчика не может неограниченно возрастать. Наибольшее среднее значение выходного сигнала зависит от напряжения питания цепи рабочей обмотки:
U д.нб = 0,9 U · r / (2 rp + r ). (8)
2. Предельное значение, при котором сохраняется линейная зависимость между входным и выходным сигналами, определяется условием, чтобы в момент начала перемагничивания сердечника падение напряжения на активных сопротивлениях цепи рабочих обмоток не превосходило мгновенного значения напряжения:
· U · sin αп = (2rp + r) · i р ; (9)
здесь αп – наименьшее значение угла α, при котором сохраняется линейная зависимость U д(I).
Величину αп можно определить, используя формулы (6) и (9):
αп = arctg ( sin αп/ cos αп) = arctg (2/π) = 32º30’.
Предельная величина выходного сигнала
U д . п = r · I · w/w р = r · [U · cos αп /(2rp + r)] · [2 /π].
U д . п = U д . нб · cos(32º30’) == 0,844 · U д . нб . (10)
Предельная величина входного сигнала
I п = [ w / w р ] · [ U д.п / r ] = [2 / π ] · cos αп · [ w / w р ] · [ U /(2 rp + r )].
I п = = 0,758 · [ w / w р ] · [ U /(2 rp + r )] . (11)
3. Минимальное значение выходного сигнала U д.о при I = 0 определя-ется током намагничивания датчика.
Характеристика реального датчика тока показана на рис.4 (кривая 1). Поскольку датчик тока состоит из двух сердечников с одинаковыми рабочими обмотками, включенными встречно, то характеристика датчика симметрична относительно оси ординат. Коэффициент преобразования датчика тока:
k д = ∆U д /∆ I = r · ∆ I р /∆ I = r · w / w р . (12)
Рассмотрим, как зависит характеристика датчика тока от его парамет-ров. Предел линейной зависимости можно расширить в соответствии с формулой (11) уменьшением числа витков входной обмотки w, или сопротивления цепи рабочих обмоток r. При этом наклон характеристики относительно оси абсцисс и соответственно коэффициент преобразования датчика уменьшаются (кривая 2).
Расширение предела линейной зависимости ограничено минимальным числом витков входной обмотки w= 1. С уменьшением сопротивления рабочей цепи возрастает величина рабочего тока, увеличивая нагревание обмоток, что также ограничивает расширение предела линейности характе-ристики датчика.
Изменение величины питающего напряжения не оказывает влияния на наклон характеристик датчика, поскольку коэффициент преобразования не зависит от величины U. Это свойство характеризует хорошую помехоустойчивость датчика при колебаниях питающего напряжения.
Увеличение напряжения питания приводит к расширению предела пропорционального преобразования входного тока (кривая 3). Однако в этом случае происходит насыщение сердечников при I = 0, что приводит к увеличению тока намагничивания датчика и напряжения U’д.о, как это показано на рис.4 штриховыми линиями.
Характеристику датчика тока можно сместить вправо или влево, используя обмотку смещения. Если намагничивающая сила обмотки смещения совпадает по направлению с намагничивающей силой входной обмотки, характеристика управления смещается влево (положительное смещение) на величину ∆Iс (см. кривую 4).
∆Iс = Iсм · w см / w . (13)
При встречном направлении намагничивающих сил характеристики смещаются вправо (отрицательное смещение). Возможность смещения характеристик позволяет использовать датчик тока в качество устройства сравнения (сумматора намагничивающих сил обмоток входной и смещения), а также для изменения знака коэффициента преобразования датчика. Обмотка смещения в этом случае выполняет функции задающего устройства.
Описание лабораторной установки
Рабочие обмотки датчика постоянного тока имеют по 1250 витков с общим сопротивлением 32 Ом и рассчитаны на ток 0,2 А. Входная обмотка имеет 50 витков с выводом от 30-го витка и рассчитана на ток 5 А. Обмотка смещения имеет 1300 витков и рассчитана на ток 0,05 А.
Принципиальная схема исследования характеристик датчика тока показана на рис.5. Регулирование величины силового тока осуществляют реостатом, включенным на напряжение 50 В по схеме потенциометра. Дроссель в цепи силовой обмотки служит для сглаживания пульсаций силового тока, обусловленных источником питания. Рабочие обмотки питаются напряжением 36 В от лабораторного автотрансформатора.
Рис.5
Для варьирования сопротивления нагрузки имеются два резистора сопротивлением 200 и 300 Ом. Питание обмоток смещения осуществляется постоянным напряжением 50 В через высокоомный потенциометр.
Для исследования формы кривой изменения рабочего тока надо подключить к резисторному шунту rш в рабочей цепи электронный осциллограф.
Осциллограммы изменения магнитной индукции сердечников датчика тока можно получить путем интегрирования напряжения на одной из рабочих обмоток. С этой целью параллельно рабочей обмотке BУ датчика подключено интегрирующее звено rи · Си. Посредством этого звена произ-водится аналоговое интегрирование напряжения рабочей обмотки при условии rи >> 1/( ω · Си). Напряжение на конденсаторе в определенном масш-табе пропорционально изменению магнитной индукции сердечника B ’( ωt ):
u си ( ωt ) = [ w р · S /( ω · rи · Си)] · B ’( ωt ).
Программа работы
Экспериментальная часть
1. Собрать схему, показанную на рис.5. В рабочую цепь включить резистор r сопротивлением 300 Ом.
2. Снять характеристики датчика постоянного тока при U=36 В и диапазоне изменения входного тока от 0 до 5 А с интервалом 0,5 А. Результаты занести в таблицу.
3. Изменить направление тока во входной обмотке и повторить опыт по п.2.
4. Включить обмотку смещения, установить ток смещения 50 мА Повторить опыты по пп. 2 и 3.
5. Выключить обмотку смещения. Снять характеристики датчика тока при измененных значениях: числа витков входной обмотки, выходного сопротивления, напряжения питания в соответствии с таблицей.
Характеристики снимать только при положительных значениях входного тока.
6. Изучить и зарисовать на кальку осциллограммы рабочего тока i р ( ωt ), падения напряжения ur ( ωt ) на выходном резисторе, выходного напряжения датчика u д ( ωt ), питающего напряжения u ( ωt ), магнитной индукции B ’( ωt ) при напряжении питания 36 В и входных токах 0; 1; 3 А. Осциллограммы надо зарисовать при одинаковой настройке осциллографа для каждого вида кривых при всех заданных значениях входного тока.
7. Определить посредством осциллографа и измерительных приборов предельные величины входного тока и выходного напряжения датчика, при которых сохраняется линейность характеристики датчика.
Таблица опытных и расчетных величин
| Номер опыта | 1 | 2 | 3 | 4 | 5 | ||
| U, В | 36 | 36 | 36 | 36 | 45 | ||
| r,Ом | 300 | 300 | 300 | 200 | 300 | ||
| w , витков | 50 | 50 | 30 | 50 | 50 | ||
| Iсм , мА | 0 | 50 | 0 | 0 | 0 | ||
| Uд, В | |||||||
| направление тока I, А | + | – | + | – | + | + | + |
| 0 | |||||||
| 0,5 | |||||||
| ….. | |||||||
| 5 | |||||||
| Кд опытн. | |||||||
| Кд расчетн. | |||||||
| U д.п , В | |||||||
| U д.нб , В | |||||||
| Iп, А | |||||||
Расчетная часть
1. Построить графики характеристик датчика постоянного тока на миллиметровой бумаге. Определить из графиков и рассчитать по формуле (12) коэффициенты преобразования для всех кривых. Результаты занести в таблицу.
2. Рассчитать по формулам (8), (10), (11) величины токов и напряже-ний датчика для всех опытов. По полученным данным построить расчетные графики характеристик датчика.
3. Сравнить расчетные и опытные величины токов Iп (см. 4.1, п.7).
4. Вычислить по формуле (13) величину смещения характеристики датчика и сравнить с опытом (см. 4.1, п.4).
5. Построить совмещенные диаграммы изменения напряжений, рабо-чего тока, индукции при входном токе 1 и 3 А на миллиметровой бумаге.
Содержание отчета
Отчет должен содержать:
· принципиальную схему исследования датчика тока;
· таблицу экспериментальных и расчетных данных;
· графики характеристик датчика, полученные экспериментальным и расчетным путем;
· осциллограммы и построенные по ним совмещенные диаграммы изменения напряжения, рабочего тока, магнитной индукции для входного тока 1 и 3 А.
К отчету надо приложить черновик, подписанный преподавателем.
Контрольные вопросы
1. Как включают обмотки: рабочие, входные, смещения, между собой и относительно других обмоток?
2. Каково назначение резисторов и конденсаторов, включаемых в цепи рабочих обмоток?
3. Какая существует связь между направлением токов в обмотках датчика и состоянием намагниченности сердечников?
4. Как влияет состояние намагниченности сердечников на рабочий ток датчика?
5. Какую форму имеют кривые изменения во времени напряжения питания, тока рабочих обмоток, магнитной индукции сердечников и выход-ного напряжения датчика тока?
6. Напишите формулы, определявшие связь величин токов рабочего, входного и смещения с числом витков обмоток, напряжением питания, сопротивлением выходного резистора.
7. Как влияет на коэффициент преобразования и выходную характеристику датчика тока изменение числа витков входной обмотки сопротивления выходного резистора, питающего напряжения, тока смещения?
Литература
1. Электровоз BЛ-80T. Руководство по эксплуатации. Под ред. Б.Р. Бондаренко. М., Транспорт, 1977, с.105-106, 281-282.
2. Пассажирский электровоз ЧС-2Т. Под ред. А. Л. Лисицина. М., Транспорт, 1979, с. 158-160.
3. Капустин Л.Д., Копанев А.С., Лозановский А.Л. Особенности уст-ройства и эксплуатации электровоза ВЛ-80Р. М., Транспорт, 1979, с.125-126.
___________________________________________________________
Редактор Т.Л. Корняну
Подписано к печати 12.01 1982 г, Усл. печ.л. 0,8 Уч-изд. л. 0,5
Бумага для множ.апп. Формат бумаги 60х84/16.
Заказ №59. Тираж 300 экз. Бесплатно.
РТП ЛИИЖТа. Ленинград, Московский пр., 9
Дата добавления: 2021-01-21; просмотров: 48; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!