Статическая и динамическая балансировка
Министерство науки и высшего образования Российской Федерации
федеральное государственное автономное образовательное учреждение
высшего образования
«Северный (Арктический) федеральный университет имени М.В. Ломоносова»
|
| ||||||||||||||
| Институт судостроения и морской арктической техники (Севмашвтуз)_______ | ||||||||||||||
| (наименование высшей школы/ филиала/ института/ колледжа) | ||||||||||||||
|
| ||||||||||||||
|
| ||||||||||||||
| КУРСОВАЯ РАБОТА | ||||||||||||||
|
| ||||||||||||||
| По дисциплине: | Диагностика и ремонт судового электрооборудования | |||||||||||||
|
|
| |||||||||||||
| На тему: | Алгоритм и методика балансировки судовых электрических | |||||||||||||
|
| машин | |||||||||||||
|
| ||||||||||||||
|
| Выполнил (-а) обучающийся (-аяся): | |||||||||||||
|
| Шаньгин Илья Алексеевич | |||||||||||||
|
| (ФИО) | |||||||||||||
|
| Направление подготовки / специальность: | |||||||||||||
|
| 26.03.02 Кораблестроение, океанотехника и | |||||||||||||
|
| системотехника объектов морской инфраструктуры | |||||||||||||
|
| (код и наименование) | |||||||||||||
|
| Курс: 4 | |||||||||||||
|
| Группа: 521723 | |||||||||||||
|
|
| |||||||||||||
|
| Руководитель: | |||||||||||||
|
| Семёнов Дмитрий Николаевич | |||||||||||||
|
| (ФИО руководителя)
| |||||||||||||
|
| ||||||||||||||
| Признать, что проект выполнен и защищен с отметкой |
|
| ||||||||||||
|
| (отметка прописью) | (дата) | ||||||||||||
| Руководитель |
| Д.Н. Семёнов | ||||||||||||
|
| (подпись руководителя) | (инициалы, фамилия) | ||||||||||||
|
|
|
|
| |||||||||||
|
|
|
|
| |||||||||||
|
Северодвинск 2020 | ||||||||||||||
Министерство науки и высшего образования Российской Федерации
федеральное государственное автономное образовательное учреждение
высшего образования
«Северный (Арктический) федеральный университет имени М.В. Ломоносова»
Филиал в г. Северодвинске Архангельской области
|
|
| ||||||||||||||||||||||||||||||||||
| Судовой электроэнергетики и автоматики |
| ||||||||||||||||||||||||||||||||||
| (наименование кафедры) |
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
| ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ |
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
| по | Диагностика и ремонт судового электрооборудования |
| |||||||||||||||||||||||||||||||||
|
| (наименование дисциплины) |
| |||||||||||||||||||||||||||||||||
|
|
|
| |||||||||||||||||||||||||||||||||
| студенту | 4 | института
| Севмашвтуз | курса | 521723 | группы |
| ||||||||||||||||||||||||||||
| Шаньгин Илья Алексеевич |
| ||||||||||||||||||||||||||||||||||
| (фамилия, имя, отчество студента) |
| ||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
| ТЕМА: | Алгоритм и методика балансировки судовых электрических |
| |||||||||||||||||||||||||||||||||
| машин |
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
| ИСХОДНЫЕ ДАННЫЕ: |
|
| |||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||
| Срок выполнения: с | « | » |
| 2020 г. по | « |
| » |
| 2020 г. |
| |||||||||||||||||||||||||
| Руководитель проекта |
|
|
| Д.Н. Семёнов |
| ||||||||||||||||||||||||||||||
|
| (должность) | (подпись) |
| (инициалы, фамилия) |
| ||||||||||||||||||||||||||||||
|
|
|
|
|
|
| ||||||||||||||||||||||||||||||
|
|
|
|
|
|
| ||||||||||||||||||||||||||||||
|
|
|
|
| ||||||||||||||||||||||||||||||||
|
|
|
|
|
| |||||||||||||||||||||||||||||||
|
|
|
|
|
|
| ||||||||||||||||||||||||||||||
|
|
|
|
|
|
| ||||||||||||||||||||||||||||||
|
|
|
|
|
|
| ||||||||||||||||||||||||||||||
| Северодвинск 2020 |
| ||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||
Лист замечаний
ОГЛАВЛЕНИЕ
Введение. 5
1 Виды неуравновешанности ротора. 6
2 Статическая и динамическая балансировка. 8
3 Особенности настройки оборудования при статической и динамической балансировке. 11
4 Примеры приборов, используемых при балансировке. 14
5 Балансировка роторов в эксплуатационных условиях. 16
Заключение. 18
Список использованных источников. 19
Сведения о самостоятельности выполненной работы.. 20
Введение
Как известно, электродвигатель состоит из двух элементов – статического (статора) и подвижного (ротора). Последний при работе может вращаться на очень высокой скорости, которая составляет тысячи и десятки тысяч оборотов в минуту.
Дисбаланс ротора не только приводит к повышенной вибрации, но и может повредить сам ротор или весь электродвигатель. Также из-за этой проблемы увеличивается риск поломки всей установки, где используется этот ЭД.
|
|
|
Чтобы избежать этих негативных последствий, производится балансировка якорей электродвигателей – она же «балансировка ротора» или «балансировка электродвигателя».
Виды неуравновешанности ротора
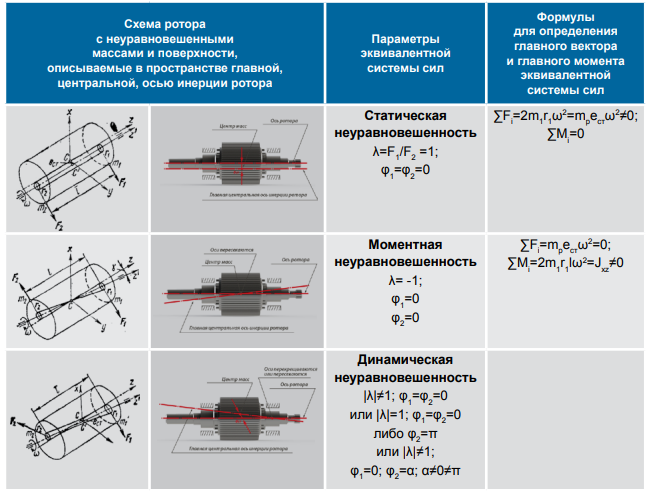
Рисунок 1 - Параметры эквивалентных систем для неуравновешенности
В зависимости от взаимного расположения оси ротора z’ и его главной центральной оси инерции z различают три вида неуравновешенности, показанные на рисунке 1, в которой φ1 и φ2 соответствуют величинам углов между векторами эквивалентных сил неуравновешенности F1 и F2 и некоторой начальной осью, которая в рассматриваемом случае совмещена с вектором F1 . При статической неуравновешенности оси z и z’ параллельны. Эта неуравновешенность полностью определяется главным вектором дисбалансов D или эксцентриситетом ecт. При моментной неуравновешенности ось ротора и его главная центральная ось инерции пересекаются в центре масс. Моментная неуравновешенность полностью определяется главным моментом дисбалансов ротора МD или его центробежными моментами инерции. При динамической неуравновешенности, состоящей из статической и моментной, ось ротора и его главная центральная ось инерции пересекаются не в центре масс ротора или перекрещиваются. Динамическая неуравновешенность определяется главными вектором и моментом дисбалансов
Статическая и динамическая балансировка
Сбалансированный ротор – это ротор, у которого ось вращения совпадает с осью инерции. Правда, абсолютного баланса можно добиться лишь в идеальном мире, в реальности же всегда наблюдается хоть небольшой, но «перекос». И задача балансировки заключается в его минимизации.
Различают статическую и динамическую балансировку роторов.
Балансировку разделяют на статическую, моментную и динамическую. Статическая балансировка производится без вращения ротора; с ее помощью уменьшается только статическая составляющая неуравновешенности.
При наличии в роторе неуравновешенности двух видов статическая балансировка лишь облегчает последующую динамическую балансировку, которая является обязательной операцией. Динамическая балансировка производится при вращении ротора и позволяет уменьшить неуравновешенность всех видов. метрологическую законность измерений) цепочка измерения какого-то физического параметра может иметь вид:первичный преобразователь - измерительный прибор - КОП - компьютер
Статическая балансировка осуществляется на параллельных стальных призмах (параллелях), закаленные поверхности которых должны быть тщательно отшлифованы. Установка на специальных подставках должна практически исключать прогиб нагруженных параллелей; отклонение рабочих плоскостей последних от горизонтальной плоскости не должно превышать 0,1 мм на 1 м.
Ротор, установленный шейками на параллели, выводится из равновесия и предоставляется самому себе. После нескольких колебаний он устанавливается «легким местом» вверху, которое отмечается (точка а) на вертикали, проходящей через ось ротора.
После этого подбирается такая корректирующая масса, установка которой в «легком месте» приводит к безразличному состоянию ротора в любом положении на параллелях.
При хорошем состоянии рабочих поверхностей и аккуратной установке параллелей статической балансировкой можно довести удельную остаточную неуравновешенность (остаточный эксцентриситет) до 5—10 мкм.
Для проведения динамической балансировки ротора в своих подшипниках необходимо располагать не только аппаратурой, но и определенной методикой.
Нельзя начинать балансировку машины, не имея заранее четкого представления о последовательности предстоящих операций или рассчитывая на то, что место установки нужной корректирующей массы удастся «нащупать» с помощью обхода.
В настоящее время существует несколько различных методов балансировки, в которых вектор требуемой корректирующей массы находится расчетным путем на основании приращений вибраций от установки на ротор пробных корректирующих масс. Каждый из этих методов позволяет достигнуть требуемой сбалансированности ротора машины, однако между ними имеются существенные различия как в последовательности операций процесса балансировки, так и в объеме необходимых расчетов.
Применяемые методы динамической балансировки основаны на предположении, что при неизменной частоте вращения ротора размахи основной гармонической составляющей вибрации подшипников на каждом шаге балансировки, т. е. от одного пуска к последующему, пропорциональны вызывающим их возмущающим силам и что сдвиг фаз возмущающей силы и вибрации при этом не изменяется.
Электрические машины в большинстве случаев имеют симметричное исполнение, и для них наиболее эффективной оказывается методика раздельного снижения статической и моментной составляющих динамической неуравновешенности ротора. Эта методика является частным случаем уравновешивания ротора гибких валов по формам свободных колебаний. Обладая большой наглядностью и простотой расчетных операций, она позволяет в то же время производить балансировку ротора за малое число пусков.
До начала балансировки нужно выполнить следующие операции подготовки: произвести разметку плоскостей коррекции в направлении вращения с интервалами не более 30°; нулевые отметки с обеих сторон должны находиться в одной радиальной плоскости. На удобном для наблюдения торце ротора в той же плоскости краской наносится отметка — начальный радиус. Рядом располагается лимб для отсчета фазы по стробоскопу, угловая разметка лимба производится против вращения с интервалом не более 10°. Нулевая отметка лимба располагается вертикально.
Подготовка приборов производится в соответствии с прилагаемыми к ним инструкциями.
Дата добавления: 2021-01-21; просмотров: 182; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!