Пример расчета гладкого фильтра.
Произвести расчет ФНЧ с гладкой частотной характеристикой с перегибом характеристики в точке p/3. За исходную функцию принять функцию (7.4.3).
1. x= cos(p/3)= 0.5= (z-r)/(z+r). Принято: z=3, r=1.
Исходный многочлен: g(x) = (1-x)(1+x)3 = 1+2x-2x3-x4.
2. H(x)=  g(x)dx = C+x+x2-0.5 x4-0.2 x5. При х= -1, H(-1)= 0, откуда С=0.3. При х=1, H(1)=1.6.
g(x)dx = C+x+x2-0.5 x4-0.2 x5. При х= -1, H(-1)= 0, откуда С=0.3. При х=1, H(1)=1.6.
Отсюда: H(x)= (3+10x+10x2-5x4-2x5)/16. gn = {3/16, 10/16, 10/16, 0, -5/16, -2/16}.
3. Применяя рекурсивное преобразование, получаем: hn= {(98, 70, 20, -5, -5, -1)/256}.
Для расчетов гладких фильтров высоких частот в выражении (7.4.4) достаточно поменять местами пределы интегрирования. Гладкие полосовые фильтры получаются комбинацией ФНЧ и ФВЧ с перекрытием частот пропускания.
Курсовая работа 9-07. Разработка методики и программы расчета весовых функций на базе гладких нерекурсивных фильтров.
Дифференцирующие цифровые фильтры.
Передаточная функция. Из выражения для производной d(exp(jwt))/dt = jw exp(jwt)
следует, что при расчете фильтра производной массива данных необходимо аппроксимировать рядом Фурье передаточную функцию вида H(w) = jw. Поскольку коэффициенты такого фильтра будут обладать нечетной симметрией (h-n = -hn) и выполняется равенство
hn [exp(jwn)-exp(-jwn)] = 2j hn sin nw,
то передаточная характеристика фильтра имеет вид:
H(w) = 2j(h1 sin w + h2 sin 2w + ... + hN sin Nw),
т.е. является мнимой нечетной, a сам фильтр является линейной комбинацией разностей симметрично расположенных относительно sk значений функции. Уравнение фильтрации:
yn =  hn(sk+n - sk-n).
hn(sk+n - sk-n).
|
|
|
Если дифференцированию подлежит низкочастотный сигнал, а высокие частоты в массиве данных представлены помехами, то для аппроксимации в пределах главного частотного диапазона задается (без индекса мнимости) передаточная функция фильтра вида:
H(w) = w, w £ wв, H(w) = 0, wв< w £ wN.
Оператор дифференцирующего фильтра:
h(n) = (2/p)  H(w) sin(npw/wN) dw, n = 0,1,2,... (7.5.1)
H(w) sin(npw/wN) dw, n = 0,1,2,... (7.5.1)
Принимая, как обычно, wN = p (Dt = 1) и решая (7.5.1) при H(w) = w, получаем:
hn = (2/p)[sin(nwв)/n2 - wв cos(nwв)/n], (7.5.2)
hо = 0, h-n = -hn.
Частотная характеристика:
Im(H(w)) =  hn sin nw = 2
hn sin nw = 2  hn sin nw. (7.5.3)
hn sin nw. (7.5.3)
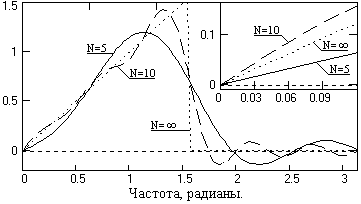
Точность дифференцирования. На рис. 7.5.1 приведен пример расчета коэффициентов дифференцирующего фильтра на интервал частот {0-0.5}p при Dt=1 (wв = p/2). Операторы дифференцирующих фильтров, как правило, затухают очень медленно и, соответственно, достаточно точная реализация функции (7.5.3) весьма затруднительна.
|
Рис. 7.5.1. Коэффициенты оператора фильтра. |

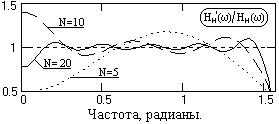
Ряд (7.5.3) усекается до N членов, и с помощью весовых функций производится нейтрализация явления Гиббса. Явление Гиббса для дифференцирующих фильтров имеет весьма существенное значение, и может приводить к большим погрешностям при обработке информации, если не произвести его нейтрализацию. Примеры ограничения оператора, приведенного на рис. 7.5.1, и соответствующие передаточные функции H'(w) усеченных операторов показаны на рис. 7.5.2.
|
|
|
Для оценки возможных погрешностей дифференцирования усеченными операторами произведем расчет фильтра при wв = p/2. По формулам (7.5.2) определяем:
h0-10 = 0, 0.3183, 0.25, -0.0354, -0.125, 0.0127, 0.0833, -0.0065, -0.0625, 0.0039, 0.05.
|
Рис. 7.5.2. Частотные функции фильтров. |
Произведем проверку работы фильтра на простом массиве данных sn = n, производная которого постоянна и равна 1. Для массива с постоянной производной фильтр может быть проверен в любой точке массива, в том числе и в точке n=0, для которой имеем:
у =  hn so-n = 2
hn so-n = 2  n hn,
n hn,
при этом получаем: у=0.5512 при N=5, у=1.53 при N=10.
|
Рис. 7.5.3. Погрешность дифференцирования. |
Такое существенное расхождение с действительным значением производной объясняется тем, что при w=0 тангенс угла наклона реальных передаточных функций фильтра, как это видно на рисунке 7.5.2, весьма существенно отличается от тангенса угла наклона аппроксимируемой функции H(w) = w. На рис. 7.5.3 приведены частотные графики относительной погрешности дифференцирования s = Hн'(w)/Hн(w) с вычислением значений на нулевой частоте по пределам функций при N → ∞. На рис. 7.5.4 приведен пример операции дифференцирования гармоники s с частотой wo оператором с N=10 в сопоставлении с точным дифференцированием ds/dk.
|
|
|

Рис. 7.5.4. Пример операции дифференцирования.
Применение весовых функций. Применим для нейтрализации явления Гиббса весовую функцию Хемминга. Результат нейтрализации для фильтра с N=10 приведен на рис. 7.5.5. Повторим проверочный расчет дифференцирования на массиве sn = n и получим результат у=1.041, т.е. погрешность дифференцирования уменьшается порядок.
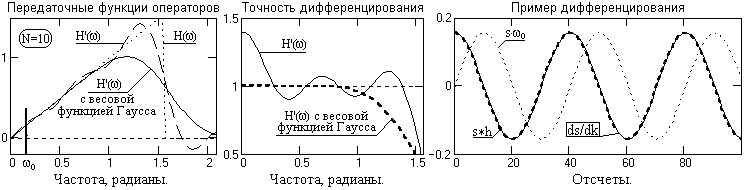
Рис. 7.5.5. Дифференцирование с применением весовой функции.
Аналогично производится расчет и полосовых дифференцирующих фильтров с соответствующим изменением пределов интегрирования в (7.5.1) от wн до wв. При этом получаем:
hn = (wнcos nwн-wвcos nwв)/(np) + (sin nwв-sin nwн)/(n2p).
Фильтры с линейной групповой задержкой. Дифференцирующие фильтры, а равно и любые другие фильтр с мнимой частотной характеристикой, например, оператор преобразования Гильберта, могут быть выполнены в каузальном варианте при условии обеспечения линейной групповой задержки сигнала, которое записывается следующим образом:
|
|
|
j(w) = b - aw, (7.5.4)
где b и a - константы.
Оно выполняется, если импульсная характеристика фильтра имеет положительную симметрию:
h(n) = -h(N-n-1), n = 0, 1, 2, …, (N-1)/2, N – нечетное (тип 1);
n = 0, 1, 2, …, (N/2)-1, N – четное (тип 2).
При этом фазовая характеристика будет определяться длиной фильтра:
a = (N-1)/2, b = p/2.
Частотная характеристика фильтра:
H(w) = |H(w)| exp(jj(w)), (7.5.4)
где модуль |H(w)| задается нечетным. Оба типа фильтров вводят в выходной сигнал сдвиг фазы на 90о. Кроме того, частотная характеристика фильтра типа 1 всегда равно нулю на частоте Найквиста, что определяется знакопеременностью левой и правой части главного диапазона спектра с учетом периодизации спектра дискретных функций.
Курсовая работа 10-07. Разработать и исследовать оптимальный способ закругления частотной характеристики дифференциального фильтра и реализовать его в программе расчета фильтра и фильтрации цифровых данных..
7.6. АЛЬТЕРНАТИВНЫЕ МЕТОДЫ РАСЧЕТА нцф [43].
Метод прямого расчета НЦФ по частотной характеристики понятен и прост для применения. Недостаток метода – отсутствие гибкости. Он не позволяет проектировать фильтры с разной степенью неравномерности частотной характеристики в полосах пропускания и подавления, а степень неравномерности не зависит от количества членов фильтра и не может изменяться. Максимальные осцилляции частотной характеристики всегда наблюдаются в области полосовых границ и уменьшаются при удалении от них, но при близких границах могут наблюдаться явления интерференции осцилляций. Более гибкими в проектировании являются альтернативные методы: оптимизационные,
Оптимизационные методы позволяют проектировать экономные по размерам операторы фильтров с оптимальными (по Чебышеву) осцилляциями частотных характеристик. Они основаны на понятии полос равных колебаний.
|
Рис. 7.6.1. Оптимальный фильтр низких частот |
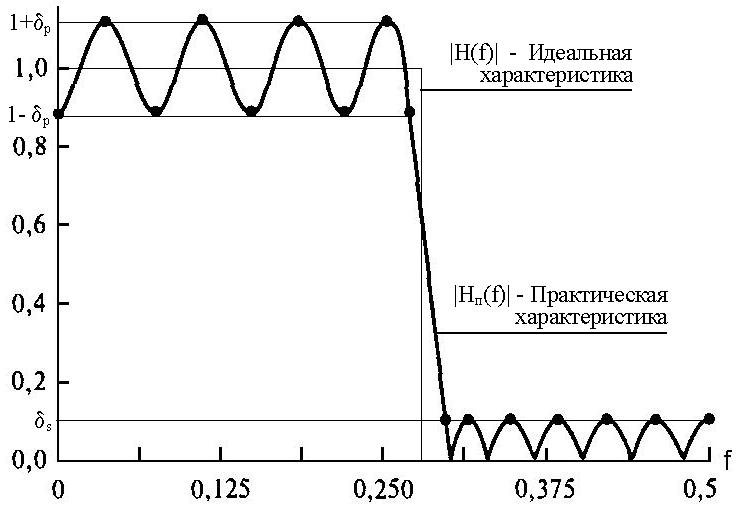
Частотная характеристика оптимального фильтра низких частот приведена на рис. 7.6.1. В полосе пропускания реальная характеристика фильтра осциллирует с постоянными амплитудными колебаниями между значениями 1-dp и 1+dp. В полосе подавления осцилляции постоянной амплитуды находятся в интервале 0-ds. Разность между идеальной и практической характеристиками представляет собой функцию ошибок E(f). Оптимальный метод позволяет определить коэффициенты фильтра h(n), для которых значение максимальной взвешенной ошибки минимизируется
min[max(E(f))]
в полосе пропускания и в полосе подавления, при этом характеристика фильтра будет иметь равные колебания в пределах полос пропускания и подавления, а количество экстремумов колебаний у фильтров с линейной фазовой характеристикой обычно прямо связано с количеством коэффициентов фильтра (N+1)/2.
При расчете фильтра ключевым моментом является определение положения частот экстремумов, которое выполняется итерационным алгоритмом Ремеза, после чего по положениям экстремумов задается частотная характеристика фильтра и определяются его коэффициенты. Методика расчета оптимальных фильтров подробно с примерами, в том числе в среде Matlab, рассмотрена в работе /43/.
Метод частотной выборки представляет собой вариант метода расчета фильтра по частотной характеристике без применения весовых функций и может применяться для расчетов как частотно-избирательных фильтров, так и фильтров с произвольной частотной характеристикой.
В основе метода лежит непосредственное задание частотной характеристики фильтра в цифровой форме с последующим подбором переходных зон под требуемые характеристики фильтра по величине допустимых осцилляций в полосе пропускания и подавления. Расчет желательно вести в интерактивном режиме, например, в среде Mathcad. В качестве примера приведем расчет низкочастотного фильтра.
|
Рис. 7.6.2. Задание параметров НЦФ. |
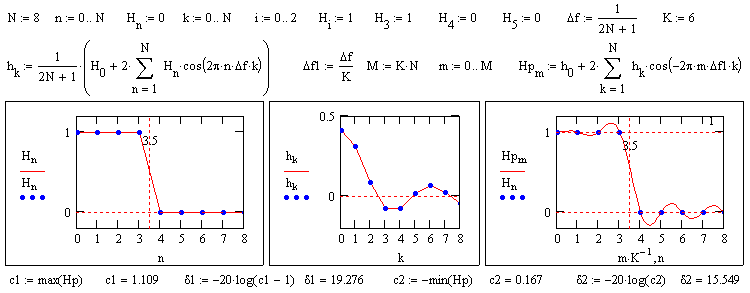
Допустим, нам требуется достаточно простой симметричный низкочастотный фильтр с шириной переходной зоны порядка 0.2 главного частотного диапазона (при Dk=1 для фильтра, fN = 0.5 Гц для спектра и ширина переходной зоны 0.2 х 0.5 = 0.1 Гц). Минимальный размер фильтра при идеальной характеристике для обеспечения такого перехода 2N+1 = 2(1+1/0.1) = 11 точек. С учетом расширения переходной зоны при уменьшении осцилляций на границе зон примем для начала N=8. Частотная характеристика проектируемого фильтра (правая половина) приведена на рис. 7.6.2 с границей раздела зон между 3 и 4 отсчетами спектра. Расчет оператора фильтра проводим обратным преобразованием Фурье, а по полученным отсчетам оператора вычисляем фактическую частотную характеристику этого оператора с уменьшением шага по частоте в 4-6 раз, что позволяет выявить осцилляции и определить погрешность фильтра (по максимумам осцилляций).
|
Рис. 7.6.3. Подбор отсчетов переходной зоны НЦФ. |
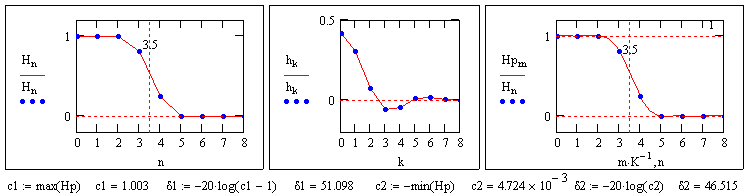
На рис. 7.6.3. показан результат подбора частотных значений характеристики фильтра в районе переходной зоны (2 точки), что позволяет более чем в 30 раз снизить осцилляции частотной характеристики.
|
Рис. 7.6.4. НЦФ с точкой подбора на границе. |

Попутно заметим, что изменение осцилляций характеристики фильтра может производиться индивидуально для зоны пропускания (левой от границы точкой) и зоны подавления (правой точкой) в зависимости от того, требуется ли более высокая точность пропускания или подавления частот. Особенно эффективно это при использовании трех точек подбора с расположением центральной точки на границе полос пропускания и подавления, как это показано на рис. 7.6.4.
При использовании данного метода может использоваться и комбинированный подход: задание на частотной характеристике избыточного количества точек, отладка параметров фильтра по трем и более точкам в переходных зонах, а затем усечение оператора фильтра с применением весовых функций.
Метод частотных выборок допускает также рекурсивную реализацию фильтров /43/.
литература
24. Хемминг Р.В. Цифровые фильтры. – М.: Недра, 1987. – 221 с.
43. Айфичер Э., Джервис Б. Цифровая обработка сигналов. Практический подход. / М., "Вильямс", 2004, 992 с.
Главный сайт автора ~ Лекции по ЦОС ~ Практикум
О замеченных опечатках, ошибках и предложениях по дополнению: davpro@yandex.ru.
Copyright ©2008 Davydov А. V .
Дата добавления: 2021-01-21; просмотров: 56; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!