Спутниковая система навигации
Спутниковые системы навигации
В бортовом оборудовании спутниковой навигации, используемом в нашем училище (GNS 430W и Garmin 420) осуществляется первичная и вторичная обработка информации, поступающей от навигационного космического аппарата (НКА). Алгоритм первичной обработки информации предусматривает выполнение следующих операций: выбор рабочее созвездия из числа видимых спутников, расчет исходных данных по выбранным спутникам для работы систем поиска сигналов и измерения навигационных сигналов, выделение и декодирование эфемеридной информации и сбор полного альманаха системы, измерение навигационных параметров, сопровождаемых НКА.
Ко вторичной обработке информации относятся операции: вычисление геодезических координат, высоты и составляющих скорости ВС, уточнение шкалы времени UTC, оценка точности определения местоположения воздушно судна, контроль целостности навигационной информации (RAIM), а также выдача на индикацию и внешним потребителям навигационной информации. В GNS 430W и Garmin 420 используется база навигационных данных фирмы «Geppesen».Выбор рабочего созвездия из совокупности видимых спутников осуществляется по полученному ранее и хранящемуся в памяти альманаху, позволяющему на любой момент времени вычислить координаты всех НКА. Критерием выбора рабочего созвездия является получение наибольшей точности определения координат местоположения ВС.
|
|
|
Также необходимо упомянуть о функции RAIM, которая используется при эксплуатации GNS 430W и Garmin 420. Она необходима для определения отказа спутникового сигнала и для предупреждения пилота о недостоверности выдаваемой информации. Для обнаружения отказов (некачественного сигнала) с помощью функции RAIM, необходимо чтобы в зоне видимости антенны бортового оборудования спутниковой навигации находились более чем четыре спутника. При наличии пяти спутников, выполняется расчет пяти различных оценок местоположения и при существенных различиях может быть определенно, что один или более одного спутника дают неверную информацию. Потеря функции RAIM может происходить в двух случаях:
1. недостаточное число спутников находится в зоне видимости системы бортового оборудования, при этом определение местоположения может оставаться точным, но происходит потеря функции контроля целостности.
2. приемник обнаруживает отказ спутника. Этот вид предупреждения влечет потерю возможности использования бортового оборудования спутниковой навигации (БОСН).
При наличии в зоне видимости антенны БОСН шести и более спутников бортовое оборудование не только определяет наличие отказавшего спутника (функция RAIM), но и исключает отказавший спутник из навигационных расчетов, что позволяет продолжить навигацию по спутниковой навигационной системе.
|
|
|
GNS 430W и Garmin 420 относятся к оборудованию класса А, предназначены, как правило, для установки на небольшие воздушные суда. GNS 430W представляет собой приемоиндикатор, включающий приемник GPS, навигационный вычислитель с функцией RAIM и устройство управления индикацией. Оборудование содержит базу навигационных данных фирмы «Geppesen» и обеспечивает расчет и индикацию ряда навигационных параметров. Навигационно-связная система GARMIN 420 состоит из приемника спутниковой навигационной системы GPS и УКВ радиостанции. Моноблок GNC-420 установлен на центральной панели приборной доски. Управление Garmin 420 осуществляется с передней панели моноблока, на который расположены органы управления и дисплей интегральной информации.
В перспективе, использование спутниковой навигации в СЛУ ГА открывает широкие возможности. В настоящее время некоторые традиционные наземные средства обеспечения неточного захода на посадку выдают экипажу менее точную, не сравнению с GPS информацию и, как правило, не выдают такой важной информации, как расстояние до порога ВПП. Это означает, что для приземления после установления визуального контакта с ВПП может потребоваться выполнение визуального манёвра что увеличит вероятность авиационных происшествий. При выполнении неточных заходов на посадку GPS, благодаря более точному наведению и информации о расстоянии до точки ухода на второй круг, обеспечивает более высокий уровень безопасности. Применение GPS при выполнении неточных заходов на посадку на ВПП, не обслуживаемые наземными навигационными средствами, или на ВПП, обслуживаемые ненадежными наземными навигационными средствами, такими как, используемая в СЛУ ГА, система посадки ОСП, снизит эксплуатационные расходы, исключит отмену полетов из-за плохой погоды, сократит задержки вылетов и изменения маршрутов.
|
|
|
Применение GPS для выполнения точных заходов на посадку за счет более низкой стоимости наземного навигационного оборудования по сравнению с оборудованием традиционной системы посадки по приборам (ILS) позволит тем самым повысить безопасность полетов. Установка наземного оборудования GPS позволит осуществить поэтапное снятие с эксплуатации и в конечном счете полный демонтаж традиционных наземных навигационных средств.
|
|
|
Спутниковая система навигации
Спутниковая система навигации – комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скороти и направлення движения и т.д.) для наземных, водных и воздушных объектов.
Состав системы GPS / ГЛОНАСС
Космический сегмент.
Космический сегмент системы GPS/ГЛОНАСС состоит из орбитальной группировки спутников, излучающих навигационные сигналы. Спутники расположены на 6-и орбитах на высоте около 20000 км. Период обращения спутников составляет 12 часов и скорость около 3 км/c. Таким образом, за сутки, каждый спутник совершает два полных оборота вокруг Земли.
Наземный сегмент.
Наземный сегмент системы GPS/ГЛОНАСС состоит из 5-и контрольных станций и главной станции управления, расположенных на военных базах США – на островах Кваджалейн и Гавайях в Тихом океане, на острове Вознесенья, на острове Диего-Гарсия в Индийском океане и в Колорадо-Спрингс, они преведены на рисунке 1. В задачи станций мониторинга входит прием и измерение навигационных сигналов поступающих с GPS спутников, вычисление различного рода ошибок и передача этих данных на станцию управления. Совместная обработка полученных данных позволяет вычислить отклонение траекторий спутников от заданных орбит, временные сдвиги бортовых часов и ошибки в навигационных сообщениях. Мониторинг состояния GPS спутников происходит практически непрерывно. «Загрузка» навигационных данных, состоящих из прогнозируемых орбит и поправок часов для каждого из спутников, осуществляется каждые 24 часа, в момент, когда он находится в зоне доступа станции управления.
В дополнение к наземным GPS станциям существует несколько частных и государственных сетей слежения, которые выполняют измерения навигационных GPS сигналов для уточнения параметров атмосферы и траекторий движения спутников.

Рисунок 1 – Наземный сегмент сиситемы GPS
Аппаратура пользователей
Под аппаратурой пользователя подразумевают навигационные приемники, которые используют сигнал со спутников GPS для вычисления текущей позиции, скорости и времени. Пользовательскую аппаратуру можно разделить на «бытовую» и «профессиональную». Во многом этом разделение условное, так как иногда достаточно трудно определить, к какой категории следует отнести GPS приемник и какие критерии при этом использовать.
Принцип действия GPS
Принцип действия спутниковой GPS навигации основан на определении расстояния от текущего положения до группы спутников. Точное местоположение GPS спутников известно из данных эфемерид и альманаха, передаваемых в навигационных сообщениях. Зная расстояние до трех спутников, можно определить текущее местоположение, как точку пересечение трёх окружностей (рисунок 2). Расстояние до спутников определяется простым уравнением
R = t × c,
Где:
t – время распространения радиосигнала от спутника до наблюдателя,
с – постоянная величина, равная скорости света.
Соответственно, зная время, за которое сигнал дошел от спутника до GPS приемника и, умножив ее на скорость света, можно определить расстояние.
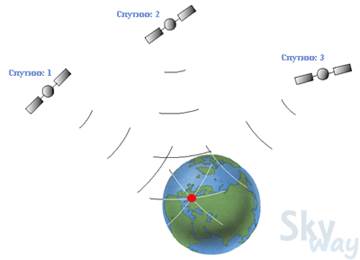
Рисунок 2 – Определение местоположения объекта.
Чтобы определить момент, в который сигнал был «отправлен» со спутника, навигационное сообщение модулируется «псевдошумовым» PRN-кодом, соответствующим номеру спутника. Аналогичная последовательность генерируется в GPS приемнике в строгой временной синхронизации с кодом спутника. Принятый со спутника код сравнивается с кодом приемника, и определяется «как давно» в приемнике была сгенерирована схожая последовательность. Выявленный таким образом сдвиг одного кода по отношению к другому будет соответствовать времени прохождения сигналом расстояния от спутника до приемника. Преимуществом кодовых посылок является то, что измерения временного сдвига могут быть проведены в любой момент времени.
Стоит отметить, что для точного вычисления расстояния часы GPS приемника и GPS спутника должны быть синхронизированы с высокой точностью. Потому что отличие даже в несколько микросекунд приводят к ошибке в несколько десятков километров, а это в свою очередь вносит погрешность в вычисление позиции.
Точность системы
Учитывая вышесказанное, мы видим, что для устранения нестабильности хода часов приемника и определения точного местоположения в двумерном пространстве (т.е. по широте и долготе) нам необходимо получить сигналы мимнимум от 3-х спутников. К счастью, сегодня количество GPS-спутников достаточно велико даже для того, чтобы в любой точке земного шара определить не только двумерные, но и трехмерные координаты – широту, долготу и высоту над уровнем моря. Для этого нужно получать сигналы минимум от 4-х спутников. При этом, чем больше спутников «видит» Ваш GPS – приемник, тем точнее он может определить координаты местоположения – вплоть до максимального предела, определяемого точностью системы. Из этого, в частности, следует, что точность работы GPS-навигатора снижается, если сигналы от некоторых спутников экранируются местными предметами (рельефом местности, деревьями с плотной кроной, высокими зданиями и т.п.).
Как известно, спутниковая GPS-система оплачивается и находится под контролем Департамента обороны США, который зарезервировал предельную точность исключительно для своих военных целей. Для этого передаваемый спутниками сигнал кодируется с помощью специального Р-кода, который может быть декодирован только военными GPS-приемниками. В дополнение к этому, в сигналы времени от спутниковых атомных часов добавляется случайная ошибка, которая искажает полученные значения координат. В результате точность гражданских GPS-премников ухудшается более чем в 10 раз по сравнению с военными и составляет около 50–150 м.
В действительности, на практике все выглядит несколько сложнее, чем в теории. Это объясняется влиянием на GPS измерения различного рода ошибок. Можно выделить три категории ошибок (рисунок 3):
· Ошибки системы.
· Ошибки связанны с распространением навигационного сигнала.
· Ошибки приемной аппаратуры.

Рисунок 3 – Категории ошибок GPS.
Ошибки системы связаны точностью атомных часов спутников и соответствием реальной траектории спутников заданной орбите. Несмотря на то, что в каждом GPS спутнике используются высокоточные атомные часы, они тоже могут содержать ошибки и отклоняться от истинного значения системного эталона времени. Отклонение в 30 нс ведет к ошибке определения расстояния в 10 метров. Поэтому, все отклонения бортовых часов отслеживаются и их значения передаются в составе навигационных сообщений и учитываются GPS приемником в вычислениях позиции.
Второй тип системных ошибок связан с неточностью передаваемых эфемерид. В математической модели учитываются множество факторов, влияющих на изменение траектории орбит GPS спутников, но небольшие ошибки все равно присутствуют.
Наиболее существенный вклад в навигационные измерения вносят ошибки, связанные с распространением сигнала атмосфере Земли, а именно в ионосферных и тропосферных ее слоях. Ионосфера Земли представляет собой слой заряженных частиц на высоте от 120 до 200 км. Эти частицы снижают скорость распространения сигнала, и, следовательно, увеличивают его время. Соответственно вносится ошибка в оценку расстояния от GPS приемника до спутника. Эти задержки могут быть смоделированы для разного времени суток, усреднены и внесены в измерения, но, к сожалению, эти модели не могут точно отобразить реальную ситуацию. После прохождения ионосферного слоя, навигационный сигнал попадает в тропосферный слой, в котором происходят все погодные явления и присутствуют водяные пары, также влияющее на скорость распространения сигнала. Для борьбы с ионосферными задержками используют дифференциальные метод определения позиции. Корректирующие поправки передаются с помощью геостационарных спутников WAAS/EGNOS и позволяют повысить точность позиционирования до 1 метра.
Ошибки многолучевости можно одновременно отнести и к категории ошибок, связанных с распространением навигационного GPS сигнала, и к ошибкам GPS приемника. Ошибка многолучевости связана с переотражением навигационного сигнала от близкорасположенных объектов – зданий, металлических конструкций, деревьев и т.п. (рисунок 4). В результате этого эффекта время распространения отраженного сигнала превышает время «прямого» сигнала. Если уровень переотраженного сигнала выше уровня «прямого» сигнала, то происходит ошибочный «захват», и в результате, вносится ошибка в вычисления расстояния до спутника.
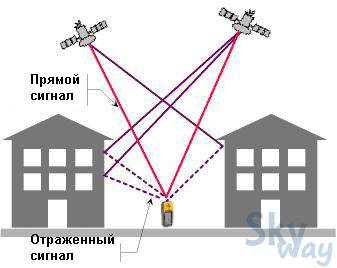
Рисунок 4 – Ошибка многолучёвости сигнала
Дата добавления: 2021-01-21; просмотров: 88; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!