Система автоматической идентификации подвижного состава (САИ)
Комплексная система автоматизированных рабочих мест
-Комплексная система автоматизированных рабочих мест технологических центров по обработке перевозочных документов (КСАРМ).
- Назначение и функциональные возможности АРМ дежурного по станции (АРМ ДСП).
Считывание информации с подвижного состава. Устройства для считывания информации. Порядок считывания информации.
- Система GLONASS и GPS навигация в перевозочном процессе.
Автоматизированные рабочие места
Деятельность работников сферы управления в настоящее время ориентирована на использование развитых информационных технологий. Организация и реализация управленческих функций требует радикального изменения, как самой технологии управления, так и технических средств обработки информации, среди которых главное место занимают персональные компьютеры. Они все более превращаются из систем автоматической переработки входной информации в средства накопления опыта управленческих работников, анализа, оценки и выработки наиболее эффективных экономических решений.
Тенденция к усилению децентрализации управления влечет за собой распределенную обработку информации с децентрализацией применения средств вычислительной техники и совершенствованием организации непосредственно рабочих мест пользователей.
Автоматизированное рабочее место (АРМ) можно определить как совокупность информационно- программно -технических ресурсов, обеспечивающую конечному пользователю обработку данных и автоматизацию управленческих функций в конкретной предметной области.
|
|
|
АРМ создаются с целью повышения производительности, оптимизации работы и улучшения условий труда работников ж.-д. транспорта – руководителей всех уровней управления, оперативно-диспетчерского персонала, операторов и т. п.
Большинство АРМ являются клиентской частью той или иной системы и обеспечивают выполнение элементов сквозных технологий управления или связанных цепочек операций. Для отдельных категорий работников созданы АРМ, включающие целый комплекс вычислительной техники и ж.-д. автоматики. Так, АРМ поездного диспетчера (ДНЦ) в общем случае содержит несколько экранов (для отображения поездного положения, графика исполненного движения, дополнительной справочной информации), микропроцессорную ДЦ с электронным табло для установки маршрутов, комплексы оперативно-технологической связи.
Выделяются две группы пользователей АРМ
· - оперативно-диспетчерский персонал, обеспечивающий управление перевозочным процессом;
· - работники линейных предприятий, реализующие технологию перевозочного процесса.
|
|
|
На сетевом уровне созданы АРМ руководителей центрального управления перевозками (ЦУП) (начальник, заместители, руководители и специалисты отделов), главного и регионального диспетчеров, других диспетчеров (локомотивного, по регулированию вагонных парков, по перевозкам отдельных видов грузов, по взаимодействию со странами СНГ и Балтии, по контейнерным перевозкам, пассажирским перевозкам, по работе с речными и морскими портами, по хозяйствам (СЦБ, энергообеспечению, путевому, локомотивному, вагонному и др.).
АРМ каждого диспетчера включает 1-2 монитора, работает в режиме «клиент – сервер» с мощной ЭВМ, где ведется сетевая модель перевозочного процесса и решаются прикладные задачи анализа и управления. Обеспечивается возможность прямого доступа к дорожным комплексам и станционным системам.
Кроме индивидуальных технических средств каждого диспетчера, в ЦУП МПС установлено табло коллективного пользования, включающее три раздела:
Ø - поле для графического представления сети или ее части с нанесением показателей (схема и набор выводимых данных меняются по инициативе главного диспетчера);
|
|
|
Ø - поле текущих итогов работы дорог и сети (погрузка, выгрузка и т.п.);
Ø - поле для видеоконференций (селекторных совещаний).
На региональном уровне (ЦУПР) используется тот же, что и для сетевого ЦУП, подход при создании АРМ. Отличительной особенностью ЦУПР является наличие диспетчерского аппарата (ДНЦ, энергодиспетчер), обеспечивающего непосредственное управление объектами со своих АРМ.
Наиболее широкую группу представляют АРМ работников линейных предприятий, включающих оперативно-диспетчерский аппарат опорного центра управления (ОЦ) и персонал, реализующий отдельные элементы технологического процесса перевозок. Созданы АРМ дежурного по станции (ДСП), дежурного по горке (ДСПГ), маневрового диспетчера (ДСЦ), товарного кассира (ТВК), приемосдатчика (П/С), агента станций передачи поездов, вагонов и грузов на межгосударственных переходах (СПВ), оператора СТЦ, оператора ПТО, ВЧД, дежурного по депо (ТЧД) и нарядчика локомотивных бригад (ТЧБ), грузового диспетчера.
Перечисленные АРМ созданы для работников линейного уровня, работают, как правило, в рамках той или иной АСУ станций. С учетом создания опорных центров управления, обеспечивающих управление перевозочным процессом в пределах линейного района (включающего несколько станций и других линейных объектов), созданы системы, обслуживающие в режиме «клиент – сервер»всех работников такого района.
|
|
|
Проводится также большая работа по увязке АСУ станций со средствами ж.-д. автоматики в целях создания комплексных АРМ, например, АРМ ДСП, АРМ ДСПГ, АРМ ПТО, АРМ ПКО, АРМ оператора СТЦ.
Для специалистов, работающих с поездами, вагонами, контейнерами, грузами на местах их дислокации (совершения непосредственных операций с ними) создаются АРМ на базе носимых терминалов, связанных с сервером АСУ станции по радиоканалу.
Автоматизированное рабочее место (АРМ) можно определить как совокупность информационно- программно- технических ресурсов, обеспечивающую конечному пользователю обработку данных и автоматизацию управленческих функций в конкретной предметной области.
Создание АРМ предполагает, что основные операции по накоплению, хранению и переработке информации возлагаются на вычислительную технику, а экономист выполняет часть ручных операций и операций, требующих творческого подхода при подготовке управленческих решений. Персональная техника применяется пользователем для контроля производственно-хозяйственной деятельности, изменения значений отдельных параметров в ходе решения задачи, а также ввода исходных данных в АИС для решения текущих задач и анализа функций управления.
АРМ как инструмент для рационализации и интенсификации управленческой деятельности создается для обеспечения выполнения некоторой группы функций. Наиболее простой функцией АРМ является информационно-справочное обслуживание. Хотя эта функция в той или иной степени присуща любому АРМ, особенности ее реализации существенно зависят от категории пользователя.
АРМ имеют проблемно-профессиональную ориентацию на конкретную предметную область. Профессиональные АРМ являются главным инструментом общения человека с вычислительными системами, играя роль автономных рабочих мест. АРМ выполняют децентрализованную одновременную обработку информации на рабочих местах исполнителей в составе распределенной БД. При этом они имеют выход через системное устройство и каналы связи в ПЭВМ и БД других пользователей, обеспечивая таким образом совместное функционирование ПЭВМ в процессе коллективной обработки.
АРМ, созданные на базе персональных компьютеров, — наиболее простой и распространенный вариант автоматизированного рабочего места для работников сферы организационного управления. Такое АРМ рассматривается как система, которая в интерактивном режиме работы предоставляет конкретному работнику (пользователю) все виды обеспечения монопольно на весь сеанс работы. Этому отвечает подход к проектированию такого компонента АРМ, как внутреннее информационное обеспечение, согласно которому информационный фонд на магнитных носителях конкретного АРМ должен находиться в монопольном распоряжении пользователя АРМ. Пользователь сам выполняет все функциональные обязанности по преобразованию информации.
Создание АРМ на базе ПК обеспечивает:
• простоту, удобство и дружественность по отношению к пользователю;
• простоту адаптации к конкретным функциям пользователя;
• компактность размещения и невысокие требования к условиям эксплуатации;
• высокую надежность и живучесть;
• сравнительно простую организацию технического обслуживания.
Эффективным режимом работы АРМ является его функционирование в рамках локальной вычислительной сети в качестве рабочей станции. Особенно целесообразен такой вариант, когда требуется «распределять» информационно-вычислительные ресурсы между несколькими пользователями.
Более сложной формой является АРМ с использованием ПЭВМ в качестве интеллектуального терминала, а также с удаленным доступом к ресурсам центральной (главной) ЭВМ или внешней сети. В данном случае несколько ПЭВМ подключаются по каналам связи к главной ЭВМ, при этом каждая ПЭВМ может работать и как самостоятельное терминальное устройство.
В наиболее сложных системах АРМ могут через специальное оборудование подключаться не только к ресурсам главной ЭВМ сети, но и к различным информационным службам и системам общего назначения (службам новостей, национальным информационно-поисковым системам, базам данных и знаний, библиотечным системам и т.п.).
Отдельную группу абонентов СПД дорожного уровня представляют комплексные системы АРМ (КСАРМ) на станциях. В КСАРМ объединяются группы абонентов, использующих в своей работе общий сервер, функционально ориентированный на решение определенного круга задач управления перевозками. Обычно сервер КСАРМ выполняет также функции КИ, что позволяет абонентам КСАРМ производить обмен информацией с ИВЦ дороги (системой АСОУП и другими системами).
Возможности создаваемых АРМ в значительной степени зависят от технико-эксплуатационных характеристик ЭВМ, на которых они базируются. В связи с этим на стадии проектирования АРМ четко формулируются требования к базовым параметрам технических средств обработки и выдачи информации, набору комплектующих модулей, сетевым интерфейсам, эргономическим параметрам устройств и т.д.
Обязательным условием функционирования АРМ является техническое обеспечение. Это обосновано выбранный комплекс технических средств для их оснащения.
Средства обработки информации – вычислительные машины разных мощностей и типов – составляют основу технического обеспечения вычислительных сетей. Характерной особенностью практического использования технических средств в организационно-экономическом управлении в настоящее время является переход к децентрализованной и сетевой обработке на базе ПЭВМ.
В другом случае, если компьютер предназначается для регулярной подготовки объемных документов и использует для этого большие массивы информации, необходима установка мощных машин с большим объемом внешней и внутренней памяти.
В сфере организационного управления пользователи могут быть условно разделены на три категории:
Ø руководители,
Ø персонал руководителей
Ø обслуживающий персонал.
Разрабатываемые АРМ для разных категорий пользователей отличаются видами представления данных. К примеру, обслуживающий персонал обычно имеет дело с внутренними данными организации, решает повторяющиеся задачи, пользуется, как правило, структурированной информацией. Руководителям требуются как внутренние, так и внешние данные для реализации цели управления или принятия решения.
.Математическое обеспечение служит основой для разработки комплекса прикладных программ.
В составе программного обеспечения (ПО) АРМ можно выделить два основных вида обеспечения, различающихся по функциям ;
Ø общее (системное)
Ø специальное (прикладное)
. К общему программному обеспечению относится комплекс программ, обеспечивающий автоматизацию разработки программ и организацию экономичного вычислительного процесса на ПЭВМ безотносительно к решаемым задачам.
Основными приложениями пакетов прикладных программ, входящих в состав специального ПО АРМ, являются обработка текстов, табличная обработка данных, управление базами данных, машинная и деловая графика, организация человеко-машинного диалога, поддержка коммуникаций и работа в сетях.
Эффективными в АРМ являются многофункциональные интегрированные пакеты, реализующие несколько функций переработки информации, например табличную, графическую, управление базами данных, текстовую обработку в рамках одной программной среды.
Языковые средства АРМ можно разделить по видам диалога.
В одном АРМ может быть реализовано несколько типов диалога:
Ø инициируемый ЭВМ
Ø с помощью заполнения шаблонов
Ø с использованием меню
Ø гибридный.
Специалистом выполняются на АРМ следующие операции:
• ввод информации с документов при помощи клавиатуры (с визуальным контролем по экрану дисплея);
• ввод данных в ПЭВМ с магнитных носителей с других АРМ;
• прием данных в виде сообщений по каналам связи с других АРМ в условиях функционирования локальных вычислительных сетей;
• редактирование данных и манипулирование ими;
• накопление и хранение данных;
• поиск, обновление и защита данных;
• вывод на экран, печать, магнитный носитель результатной информации, а также различных справочных и инструктивных сообщений пользователю;
• формирование и передача данных на другие АРМ в виде файлов на магнитных носителях или по каналам связи в вычислительных сетях;
• получение оперативных справок по запросам.
Система автоматической идентификации подвижного состава (САИ)
При большой протяженности железных дорог России время доставки груза от пункта отправления до пункта назначения может оказаться значительным. Естественно, что грузоотправитель хотел бы постоянно знать, где в данный момент находится его груз.
Система автоматической идентификации подвижных средств железнодорожного транспорта РФ и стран СНГ позволяет оперативно и объективно получать данные о времени и местонахождении каждого вагона и локомотива.
С помощью этой системы можно в реальном масштабе времени следить за движением составов, видеть, в каком пункте прицеплен или отцеплен конкретный вагон и т.д.
Кроме того, система автоматической идентификации очень много дает и самой дороге - не нужен неэффективный ручной труд списчиков номеров вагонов, точно известно, где и в каком состоянии находятся локомотивы, необходимые для движения поездов, и т.д.
Информация, поступающая из САИ, позволит не только повысить оперативность и качество решения существующих проблем, но и решать совершенно новые технологические задачи.
Автоматическое считывание информации с подвижного состава- опознавание номеров вагонов и локомотивов на ж.дорогах : позволяет автоматизировать:
Ø учет
Ø отчетность,
Ø оперативное планирование
Ø управление на ж.д. транспорте
Информация о номерах единиц подвижного состава является исходной для формирования и расформирования поездов на сортировочных станциях. а также при комплексной автоматизации перевозочного процесса, а особенности в автоматизированной системе управления ж.д транспортом.
Различают системы автоматического считывания:
· с дополнительными датчиками, размещенными на каждом вагоне, локомотиве
· системы, непосредственно считывающие номер, нанесенный на единицу подвижного состава
Вагонные датчики представляют собой несколько волновых объемных резонаторов, настроенных на частоты. соответствующие коду номера единицы подвижного состава .На ж.д. пути расположена передающая и приемная аппаратура считывающего устройства. При прохождении вагонного датчика над аппаратурой высокочастотный радиопередатчик облучает волновые объемные резонаторы .Отраженный сигнал поступает в приемное устройство, где декодируется номер единицы подвижного состава.
Используются также системы с индуктивным каналом связи. На ж.д.пути устанавливается т.н .шлейф- антена, на локомотиве- датчики в виде приемной и передающей катушек ,а также радиопередатчик и устройства кодирования информации.
Радиопередатчик передает информацию(номер, состояние единицы подвижного состава, род груза, станция назначения и т.д) через передающую катушку тогда, когда на приемной катушке формируется сигнал о нахождении вагона(локомотива) над шлейф- антенной. Разработана система А.С. и. номеров вагонов с датчиками в виде ферромагнитных пластин .Одна десятичная цифра кодируется прямоугольной выемкой на пластине. Площадь и число выемок определяют код номера вагона. При движении вагона пластина проходит через магн. поле эл.-магн. катушки путевого устройства, намагничивается, после чего путевое устройство считывает соответствующий код. Возможно иное построение датчиков, расположенных на подвижном составе, например, они могут быть выполнены в виде пластин ,отражающих световые лучи.
Использование датчиков на подвижном составе требует значитель. средств при оборудовании большого числа вагонов. Неисправность датчика по существу является ошибкой, которая- «запоминается» этим датчиком и вызывает сбой в системе управления.
В системах непосредственно считывающих номер, нанесенный на единицу подвижного состава ,используется телевизионная техника, расположенная на пути. При прохождении вагона (локомотива) его номер считывается с помощью видеокамеры. Видеосигнал обрабатывается на ЭВМ, Полученный номер запоминается и передается в систему управления. При загрязнении номера имеется сигнал неизвестного номера, а также информация о типе вагона (локомотива) и месте его расположения в составе.
Основной целью внедрения системы автоматической идентификации подвижного состава является оптимизация управления перевозочным процессом.
Назначение системы автоматической идентификации подвижного состава (САИ)- система обеспечивает оперативное получение данных о местонахождении каждого вагона и локомотива в любой момент времени, позволяя в реальном масштабе времени определять не только местонахождение составов, но и их состояние (например, в каком пункте прицеплен или отцеплен конкретный вагон, и т.д.).
Полученная оперативная информация используется при решении задач управления, анализа, учёта, взаиморасчёта за пользование вагонами, информирования клиентуры железных дорог.
В настоящее время оборудуется датчиками весь подвижной состав сети ж.дорог и пункты считывания, сопряженные каналами передачи информации с центрами обработки данных.
Система идентификации предназначается для решения следующего набора основных прикладных задач:
Ø система полностью берет на себя функции контроля фактического состава поездов ,высвобождает контингент сотрудников на станциях, занятых списыванием и контролем составов поездов:
Ø создает базу реализации безбумажных информационных технологий
Ø решает проблему отчетности информационных структур по вагонным паркам, снимая имеющиеся противоречия и автоматизируя взаиморасчеты за пользование вагонами между ж.д.администрациями государств СНГ стран Балтии -участниками Соглашения о совместном пользовании грузовыми вагонами.
Ø обеспечивает информационный сервис в транзитных перевозках и в обслуживании отправителей и получателей грузов во внутреннем и межгосударственном сообщении ж.дорог.
Ø создает надежную информационную базу для перехода к системе ремонтов и технического содержания грузового вагонного парка по нормативным фактически
выполненного пробега
Ø обеспечивает достоверность и оперативность ведущих АСУ ж.д. транспорта в составе комплекса «ДИСПАРК» моделей дислокации подвижного состава на элементах сети ж.дорог, повышая за счет этого реальную эффективность решаемых в составе АСУ задач.
Основные принципы работы системы САИ «Пальма»

Рисунок 1. - Кодовый бортовой датчик
Весь подвижной состав оборудуется кодовыми бортовыми датчиками КБД-2 (рисунок 1.), несущими информацию о каждом подвижном объекте, а в пунктах контроля (пограничные переходы, границы дорог, входы и выходы сортировочных, участковых, крупных грузовых станций, границы поездных участков, контрольные пункты локомотивных и вагонных депо) устанавливаются пункты считывания (ПСЧ),включающие в себя напольные считывающие устройства (НСУ) ,при прохождении которых автоматически снимается информация с укрепленных на подвижном составе кодовых датчиков, о состоянии данного объекта и передает ее к месту ведения БД (бортов.датчика) (рисунок 2.).

Рисунок.2 - Пункт считывания
Идея считывания заключается в следующем.На вагон укрепляют датчик ВД, несущий информацию о номере в закодированном виде При проходе поезда по контрольному участку эта информация считывается и дещифрируется. Процесс считывания активизируется специальными устройствами контроля приближения поезда, в качестве которых обычно применяют короткие РЦ наложения (электронные педали) или электромагнитные очечные датчики .В процессе считывания выполняется счет осей вагонов.
Технически и организационно проблема считывания номеров вагонов сложна, поскольку:
· считывание необходимо проводить без снижения скорости движения поезда ,которая может достигать 150-160 км/час
· содержание и качество считанной информации не должно зависеть от направления движения поезда
· требуется выявлять вагоны с поврежденными или отсутствующими датчиками
· датчики д.быть простыми в настройке, легкосъемными, приемлемыми для любых типов вагонов ,долговечными, а также работать без источника питания
· достоверность считывания не должна ухудшаться при плохой видимости, загрязнениях датчика ,а также при изменениях климатических условий
Известны системы считывания, основанные на различных физических принципах взаимодействия датчиков и приемников устройств считывания, среди которых –оптические, акустические, радиоактивные, телевизионные
В зависимости от решаемой технологической задачи пункт считывания системы автоматической идентификации может располагаться в следующих местах:
Ø на входах станций между входным светофором и первой стрелкой
Ø на выходах станций между последней стрелкой и указателем « Граница станции»
Ø на контрольных пунктах локомотивных или вагонных депо.
Полученная информация об идентификаторе, номере ПСЧ, времени прохода подвижным составом контрольной точки, о направлении движения через фиксированные временные интервалы передается на концентратор линейного уровня, осуществляющего ее сбор со всех пунктов считывания данного железнодорожного узла.
Количество ПСЧ и их размещение должны обеспечивать слежение за переходом подвижного состава по всем без исключения пунктам входа и выхода выделяемых объектов управления (управление сетью - пограничные переходы, дорогой - границы дорог, отделением - межотделенческие стыковые пункты, выделенной станцией (сортировочной, участковой, крупной грузовой) - границы станции по всем входам и выходам).
Конечное сообщение содержит идентификационные данные подвижных единиц (8-значный код подвижного средства), код станции и код пункта считывания, направление следования и время прохождения, а также перечень подвижных единиц в составе поезда.
Система «Пальма» позволяет определить порядковый номер транспортного средства в составе поезда, что дает возможность выявлять вагоны или локомотивы с неисправными бортовыми датчиками. При выходе из строя бортовых датчиков на вагонах или их отсутствии в автоматизированную систему организации управления перевозками (АСОУП) будут поступать данные о количестве проходящих через пункт считывания транспортных средств в составе поезда, а при формировании сообщения о проходе поезда считанные идентификационные номера вагонов соотносятся с порядковыми номерами подвижных единиц в составе поезда.
На очередной станции технического обслуживания (участковой станции) в систему должна быть введена информация об идентификаторах подвижных единиц, у которых КБД временно отсутствуют или неисправны. До пункта завершения следования в составе поезда эта информация должна поддерживаться программно, а после прибытия в пункт назначения (выгрузки) до исправления неисправности по КБД вагон или локомотив использоваться в перевозках не должен
В сообщение о проходе транспортного средства входят:
Ø информация о дате и времени прохода поезда или маневрового состава через пункт считывания;
Ø порядковый номер подвижной единицы в поезде и привязанная к этому номеру информация, считанная с кодового бортового датчика.
Ø
Схема прохождения информации в системе САИ представлена на рисунке:
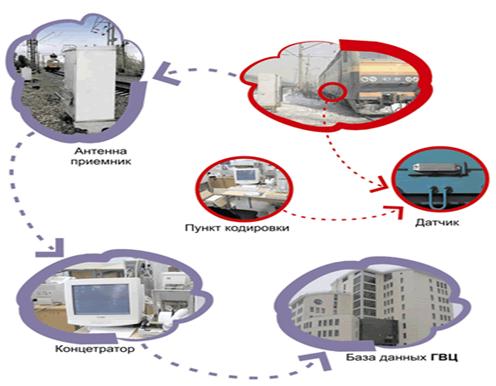
Структура Системы автоматической идентификации подвижного состава- представлена на рисунке :

Информация, считанная с подвижного состава радиочастотными средствами, увязывается с информацией, полученной от средств железнодорожной автоматики, и передается от ПСЧ на концентратор линейного уровня КСАИ-Л. С этого концентратора обработанные и представленные в виде стандартных сообщений данные поступают на концентратор дорожного уровня КСАИ-Д или в АРМы линейных предприятий. На уровне КСАИ-Д осуществляется логический контроль правильности cчитанной информации, а затем полученные сведения пополняют информационные массивы задач управления. Структура САИ позволяет с минимальными затратами оперативно донести результаты считывания до комплексов решаемых в АСОУП задач (управление движением, грузовой работой, вагонным хозяйством, сервисное обслуживание клиентуры железнодорожного транспорта и др.).
Функции Системы автоматической идентификации подвижного состава
Система идентификации при комплексной ее реализации:
· - полностью реализует функции контроля состава поездов, что позволяет уменьшить штат сотрудников, контролирующих составы поездов;
· - обеспечивает внедрение безбумажных информационных технологий;
· - повышает достоверность и оперативность отчетности о состоянии вагонных и локомотивных парков;
· - обеспечивает высокий уровень информационного сервиса во внутренних и транзитных международных перевозках;
· - повышает эффективность решаемых задач в составе АСУ железнодорожного транспорта.
Средства и технические требования системы САИ «Пальма»
Система автоматической идентификации (САИ) «Пальма» работает на основе СВЧ- технологии с применением частот 865, 867 и 869 МГц, что позволяет считывать информацию на больших расстояниях и при высоких скоростях движения. Базовый уровень системы образует облучающая считывающая аппаратура. В ее состав входят считыватель с антенной и кодовый бортовой датчик. Датчик представляет собой пассивный элемент, не содержащий источника питания; необходимая для его работы энергия поступает от считывателя в виде электромагнитного сигнала. Дальность работы напрямую зависит от мощности считывателя. Преимуществом пассивных кодовых бортовых датчиков перед активными, имеющими источник питания, является практически неограниченный срок службы - не требуется замена элемента питания. Кодовый бортовой датчик КБД-2 относится к категории RW-датчиков (с возможностью многократной записи и считывания информации).
Датчик КБД-2, устанавливаемый на вагонах, имеет память в 128 бит, достаточную в том числе для записи 12-значного номера подвижной единицы. С антенной он взаимодействует на расстоянии до 5 метров. Обеспечивает сохранность данных в диапазоне температур от -60°С до +100°С, нормально функционирует при температуре окружающей среды от -50°С до +70°С, при относительной влажности воздуха до 100%, при дождях и тумане, при обледенении до 3 мм, при покрытии слоем сажи, нефти или мазута толщиной до 1 мм. Датчик защищен от вибраций и ударов.
Имеется возможность перезаписывать данные до пяти раз, однако для предотвращения несанкционированного перекодирования предусматриваются меры, не допускающие повторной записи. Это достигается благодаря особой конструкции датчика, позволяющей устанавливать его на борт транспортного средства только один раз. При попытке снять датчик, что необходимо для перекодирования, его внутренние элементы разрушаются.
Радиочастотная идентификация (СВЧ-технология) имеет следующие преимущества по сравнению с другими техническими решениями (оптическое считывание - визуальное распознавание бортового номера, нанесенного на транспортное средство; использование поверхностных акустических волн; штриховое кодирование и др.): в радиочастотный датчик можно записать, причем значительно быстрее, гораздо больше данных; такие датчики долговечны (средний срок службы не менее 10 лет); расположение датчика не имеет особого значения для считывателя; датчик лучше защищен от воздействия окружающей среды.
Параметры системы в части достоверности считывания и передачи информации близки к требованиям технического задания.
Перспективы использования САИ «Пальма»
v . Применение САИ с вагонными весоизмерительными системами.
v . Для получения данных о крупнотоннажных грузовых контейнерах, об эксплуатации вагонов и автомобилей (объемах перевозок, пробеге, ремонтах и т. п.).
v . Идентификация составных узлов железнодорожных и автомобильных объектов (при использовании электронных меток, устанавливаемых на эти узлы и считываемых в процессе оперативного контроля как в стационарном положении, так и в процессе движения средствами САИ).
Система автоматической идентификации подвижного состава «Транстелекарт»
Система автоматической идентификации подвижного состава САИ «Транстелекарт» предназначена для автоматической фиксации проследовавших через заранее установленные пункты считывания единиц железнодорожного подвижного состава, определения их типа, индивидуального номера и других параметров (грузовых и пассажирских вагонов, локомотивов, большегрузных контейнеров, установленных на платформы и т.д.).
Для осуществления автоматической идентификации на подвижный состав устанавливаются информационные бортовые кодированные датчики (ИД), в которые записывается информация, характеризующая подвижное средство в соответствии с принятым международным стандартом ISO 10374. Записанная в ИД информация автоматически считывается в пунктах считывания, обрабатывается и передается в автоматизированную систему управления перевозками железной дороги.
Считывание информации осуществляется с подвижных средств, движущихся со скоростью до 140 км/ч.
Считывание информации с ИД осуществляется в автоматическом режиме на реальных скоростях движения. Система идентифицирует количество подвижных единиц в составе, определяет их тип (вагон, локомотив), наличие информационных датчиков, а также фиксирует время прохождения через пункт считывания.
Принцип работы САИ «Транстелекарт» основан на использовании СВЧ радиосигналов, с помощью которых происходит облучение датчика, установленного на подвижное средство, прием отраженного от датчика сигнала, декодирование и передача его в автоматизированную систему управления грузоперевозчиками железной дороги.
Состав Системы автоматической идентификации подвижного состава «Транстелекарт»
Система автоматизированной идентификации подвижного состава САИ «Транстелекарт» состоит из следующих составных частей:
Пункта кодирования датчиков бортовых информационных (ИД) – является составной частью системы автоматической идентификации подвижного состава и большегрузных контейнеров «Транстелекарт» (САИ «Транстелекарт») и предназначен для записи и чтения информации датчика бортового информационного кодируемого типа ИД.
Пункта считывания системы автоматической идентификации (ПСЧ) – является составной частью системы автоматической идентификации подвижного состава и большегрузных контейнеров «Транстелекарт» (далее САИ «Транстелекарт») и предназначен для объединения всех ее компонентов. Он обеспечивает формирование необходимых управляющих сигналов, питающих напряжений, а также осуществляет связь с концентратором информации. ПСЧ устанавливается в специально выбранных местах в непосредственной близости от железнодорожных путей с выдерживанием габарита приближения к строениям. ПСЧ состоит из устройства, считывающего высокочастотного (УСВ) – для считывания данных с бортовых ИД. Вероятность ошибочного считывания информации в ИД не более одной необнаруженной ошибки на 1 млн. эпизодов считывания.
.
Шкаф ПСЧ принимает от УС данные, считанные с информационных бортовых датчиков (ИД), определяет число и тип подвижных средств в составе при скоростях движения до 140 км/ч и передает информацию по двухпроводной выделенной линии с помощью модема. ПСЧ переключается на питание от резервной линии при пропадании напряжения на основной линии. Переходит на питание от аккумуляторной батареи при пропадании напряжения основной и резервной линий.
САИ «Транстелекарт» в части параметров обмена данных совместима с информационными датчиками аналогичных систем, используемых в России («Пальма»), Польше (SSD) и других странах, и соответствующих международному стандарту ISO 10374.
«ARSCIS» - система идентификации вагонов, цистерн, платформ
Автоматизированная оптико-электронная система считывания номеров вагонов подвижного состава железнодорожного транспорта «ARSCIS» предназначена для распознавания, регистрации (считывания) и автоматической проверки по натурному листу идентификационных номеров грузовых вагонов подвижного состава железнодорожного транспорта. Система может быть расширена дополнительными функциями коммерческого осмотра грузовых вагонов (проверка наличия или отсутствия груза), а также выполнять функцию охранной системы на контрольном участке железной дороги (автоматическое обнаружение, регистрация и классификация посторонних объектов на железнодорожных путях). Система относится к автоматизированным средствам обработки информации и предназначена для работы в условиях непрерывного технологического процесса.
Применение системы позволяет ускорить процесс переработки вагонов (тем самым повышая их пропускную способность), снизить связанные с этим эксплуатационные затраты, автоматизировать идентификацию грузовых подвижных составов, обеспечит получение и долговременное хранение информации о прохождении железнодорожных составов через зону контроля.
Область применения системы «ARSCIS»:
· нефтеперерабатывающие заводы;
· металлургические, горно-обогатительные комбинаты;
· топливно-заправочные комплексы
· сортировочные станции
· · продуктохранилища;
· · промышленные предприятия;
· · таможенные терминалы.
Основные функциональные возможности «ARSCIS»
· формирование и ввод в ЭВМ видеопоследовательности изображений рабочей сцены (телевизионный сигнал с камеры);
· автоматизированная диагностика появления железнодорожного состава в зоне контроля (при появлении железнодорожного состава автоматически включается запись видеосигнала и осуществляется распознавание номеров);
· локализация, сопровождение и подсчёт вагонов подвижного состава;
· · выявление и распознавание номеров вагонов;·
· формирование списка вагонов подвижного состава;
· сверка номеров вагонов по натур-листу;
· оповещение оператора в случае несоответствия результатов распознавания данным натур-листа и предоставление изображений с нераспознанными или отсутствующими номерами оператору для принятия решения;
· · ручной и автоматический режим сверки;
· · запись и долговременное хранение информации о прошедших составах;
· · хранение видеофрагментов прошедших составов, с возможностью последующего просмотра;
· · ведение базы данных прошедших составов с информацией о времени и дате прохождения, результатах проверки, работника осуществлявшего контроль, изображений с номерами всех вагонов соответствующего подвижного состава;
· обеспечение дополнительных функций по работе с данными: архивация, просмотр, вывод на печать, формирование отчётов;
· · защита информации от несанкционированного доступа, изменение параметров и доступ в систему осуществляется через систему паролей с разграничением прав доступа;
· · ведение журнала работы с системой;
· время и дата включения и выключения системы;
· смена работника осуществляющего контроль;
· регистрация действий, произведённых в системе;
· система сигнализации и голосового оповещения;
· · взаимодействие с другими модулями и программами, используемыми в рамках интегрированной системы автоматизированного управления станционными технологиями.
Развитие компьютерных систем управления, внедрение информационных технологий, в том числе Системы автоматической идентификации подвижного состава, позволяют поэтапно устранять существующие недостатки в организации перевозочного процесса, сделать его полностью детерминированным, повысить сохранность подвижного состава, тем самым обеспечить большую безопасность перевозок.
Система GLONASS( глобальная навигационная спутниковая система ) и GPS навигации в перевозочном процессе
Состав системы ГЛОНАСС
Технология ГЛОНАСС базируется на трех подсистемах:
· подсистемы космических аппаратов;
· подсистемы контроля и управления;
· подсистемы навигационной аппаратуры потребителей
Подсистема космических аппаратов системы ГЛОНАСС состоит из 24 космических аппаратов, находящихся на круговых орбитах высотой 19100 км, в трех орбитальных плоскостях. В каждой орбитальной плоскости размещаются по 8 спутников с равномерным сдвигом. Такая конфигурация позволяет обеспечить непрерывное и глобальное покрытие земной поверхности и околоземного пространства навигационным полем. Космические аппараты «Глонасс-М» со сроком активного существования 7 лет излучают навигационные спутниковые сигналы в двух частотных диапазонах L1 и L2.
Подсистема контроля и управления состоит из Центра управления системой ГЛОНАСС и сети станций измерения, управления и контроля, рассредоточенной по всей территории России. В задачи ПКУ входят контроль правильности функционирования космических аппаратов системы ГЛОНАСС и выдача команд управления.
Навигационная аппаратура потребителей предназначена для приема навигационных сигналов спутников ГЛОНАСС и вычисления собственных координат, скорости и времени
Полномасштабные работы по созданию отечественной навигационной спутниковой системы начались в 1960-х годах, а 23 ноября 1967 года на орбиту был выведен первый навигационный отечественный спутник («Космос-192»). Он обеспечивал точность местоопределения потребителей 250 - 300 метров.
1972
Началась работа над созданием системы, которая впоследствии получила название ГЛОНАСС.
Основные потребители услуг на основе ГЛОНАСС:
· Автотранспортные и логистические компании
· Авиакомпании, железнодорожные перевозчики, морские/речные грузоперевозчики
· Службы экстренного оперативного реагирования
· Предприятия нефтегазового, металлургического и других секторов экономики
· Геодезические и кадастровые службы
· Физические лица
Внедрение технологий ГЛОНАСС для повышения безопасности на транспорте активно началось уже в 2009 году. За это время оборудованием ГЛОНАСС было оснащено более 20 тысяч единиц пассажирского транспорта, 15 тысяч машин милиции и 1,5 тысячи автомобилей скорой помощи.
В России стартовал инновационный проект создания системы экстренного реагирования при авариях - «ЭРА-ГЛОНАСС», которая через три года охватит всю территорию страны. Проект реализуется федеральным сетевым оператором «НИС ГЛОНАСС» по поручению Президента и Правительства Российской Федерации.
В данной сфере Россия опережает другие государства: в странах Евросоюза, Китае, Бразилии разработка подобных систем находится пока на проектном этапе
Используются два типа навигационных сигналов: открытые с обычной точностью и защищённые с повышенной точностью. Защищённый сигнал повышенной точности предназначен для авторизованных пользователей, таких как Вооружённые силы РФ. В 2000-м году применили сигнал ГЛОНАСС с кодовым разделением . В спутниках Глонасс-К2 будут использоваться три открытых и два зашифрованных сигнала .
Виды железнодорожных транспортных средств, используемых для перевозки пассажиров, специальных и опасных грузов, подлежащих оснащению аппаратурой спутниковой навигации ГЛОНАСС или ГЛОНАСС/GPS
(утв. приказом Минтранса РФ от 11 января 2012 г. № 2)
1. Головные вагоны мотор-вагонного подвижного состава.
2. Пассажирские штабные вагоны.
3. Вагоны, используемые для перевозки специальных грузов.
4. Тяговый железнодорожный подвижной состав, эксплуатируемый на железнодорожных путях общего пользования.
5. Вагоны-цистерны, используемые для перевозки хлора и аммиака.
Определение местоположения объекта с помощью технологий спутниковой навигации на ж.д. транспорте обеспечивает:
v слежение за перемещением подвижного состава
v регулирование парка подвижного состава
v регистрация пробега подвижного состава
v информирование клиентуры о местоположении поездов, вагонов и грузов
v оказание помощи машинисту
v локализация дефектов пути, обнаруженных инспекционным подвижным составом
v контроль соблюдения требований безопасности при управлении движением поездов.
Сейчас действует Система точного определения местоположения локомотивов с использованием спутниковых радионавигационных систем ГЛОНАСС/GPS. Система представляет собой высокотехнологичный аппаратно-программный комплекс, предназначенный для оперативного обеспечения, в режиме реального времени, систем управления движением на ж.д. транспорте, а также других АСУ информацией о местонахождении ,скорости и направлении движения локомотивов с использованием системы ГЛОНАСС/GPS. Она обеспечивает диспетчерский персонал и смежные системы информацией о номере пути следования, местоположения на пути в ж.дорожной системе координат, скорости и направлении движения локомотива, с точностью, достоверной для решения задач управления. В качестве смежных систем могут быть использованы АСУ работай станций, АС контроля расхода топлива, сроков проведения технического обслуживания и плановых ремонтов локомотивов и др.
Система состоит из двух основных частей:
v бортовая аппаратура, которая устанавливается непосредственно на локомотив
v постовая аппаратура
Дата добавления: 2021-01-20; просмотров: 520; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!