Класифікація електричних датчиків і вимоги до них
Тема 1.1 Датчики в системах автоматики
Класифікація елементів автоматики, їх загальні характеристики
Усі пристрої автоматики, телемеханіки й обчислювальної техніки складаються з окремих елементів.
Елемент – це конструктивно відособлена частина схеми або системи, що виконує визначену функцію. Елементом може бути резистор, конденсатор, трансформатор, муфта і ін. У загальному вигляді елемент (рис.1.1) являє собою перетворювач, на вхід якого подається сигнал х , а на виході утворюється сигнал у. Елементи (Е) можуть бути пасивними й активними. У пасивних елементах (рис.1.1, а) відсутнє допоміжне джерело енергії ДДЕ, у них сигнал у утворюється за рахунок сигналу х , а в активних елементах є ДДЕ (рис.1.1, б). У цих елементах вхідний розмір тільки керує передачею енергії від ДДЕ вихідному розміру.
 | |||
 | |||
а) б)
а – пасивний елемент; б – активний елемент
Рис. 1.1 - Умовне позначення елемента автоматики, телемеханіки й обчислювальної техніки.
Розміри х і у можуть бути як електричними (струм, напруга, опір), так і неелектричними (тиск, швидкість, температура, переміщення і т. і.).
Елементи можуть відрізнятися друг від друга фізичною природою, принципом дії, схемою ввімкнення, конструкцією і ін.
За виконуючими функціями всі елементи можна розділити на датчики, підсилювачі, стабілізатори, реле, контактори, розподільники, магнітні пускачі, двигуни, муфти і т. д.
|
|
|
Автоматичні пристрої в різних сполученнях застосовуються при автоматизації керування, контролю вимірянь і регулювання (підтримки сталості визначених параметрів робочих органів машини).
Кожний елемент автоматики, телемеханіки й обчислювальної техніки являє собою перетворювач з наступними характеристиками:
1. Залежність вихідного сигналу у від вхідного х:
y = f (x)
2. Коефіцієнт перетворення.
Розрізняють три коефіцієнта перетворення: статичний, динамічний і відносний.
Статичний коефіцієнт перетворення (коефіцієнт передачі) Кст – відношення вихідного сигналу елемента у до вхідного сигналу х:
Кст = у / х
Якщо вихідний і вхідний сигнал мають однакові фізичні велечини, тоді статичний коефіцієнт перетворення визначається у відносних одиницях (напр., коефіцієнт підсилення в підсилювачах).
Динамічний коефіцієнт перетворення Кдин:
Кдин = ∆у / ∆х
Коефіцієнти Кст і Кдин будуть рівні, якщо вихідний сигнал у змінюється пропорційно вхідному сигналу х.
Відносний коефіцієнт перетворення Квідн:
Квідн = (∆у/ у) / (∆х/х) = (∆у/∆х) / (у /х) = Кдин / Кст
|
|
|
Тобто відносний коефіцієнт перетворення – це відношення динамічного коефіцієнта перетворення до статичного коефіцієнта перетворення.
Розглянуті коефіцієнти перетворення можуть застосовуватися до будь-якого елемента незалежно від виконуємих їм функцій. Наприклад, для датчиків коефіцієнт перетворення називається чутливістю, а для підсилювачів даний коефіцієнт називається коефіцієнтом підсилення.
Як правило, до датчиків пред'являється вимога забезпечення максимальної чутливості, а від підсилювачів потрібно одержання максимального коефіцієнта підсилення. Протилежна вимога пред'являється до стабілізаторів. Вони повинні мати мінімальну чутливість.
3. Межа чутливості - величина найменшої зміни вхідної величини, що викликає зміну вихідного сигналу. Границя чутливості Ох1 або Ох2 (рис.1.2) може виникати в елементах за різних причин. У зоні нечутливості D х вихідний сигнал залишається постійним і дорівнює нулю. У реле, електромагнітах, тахогенераторах, двигунах межа чутливості виникає в результаті тертя, неробочого ходу або гістерезіса.
4. Похибка – це зміна вихідного сигналу, що виникає у результаті зміни внутрішніх властивостей елемента або зміни зовнішніх умов його роботи. Розрізняють наступні види похибок: абсолютну, відносну і приведену.
|
|
|
Абсолютною похибкою ∆у називається різниця між фактичним значенням вихідного сигналу у і його розрахунковим значенням уд :
у– уд = ∆ у
Відносною похибкою e називають відношення абсолютної похибки Dу до розрахункового значення вихідного сигналу у:
e = ∆у/ уд
Відносну похибку можна виразити у відсотках:
e =( ∆у/ уд) ∙ 100%
Приведеною відносною похибкою x називають відношення абсолютної похибки D у до максимального значення вихідного сигналу умакс, що визначає діапазон його зміни:
x = D у / умакс
Приведена відносна похибка так само, як і відносна похибка, може виражатися у відсотках.
x = (D у / умакс ) ∙100%
Якщо виміри здійснюються за допомогою приладу , що показує, максимальне значення вихідного сигналу умакс приймається верхній діапазон шкали цього приладу.
Рис 1.2 - Характеристика елемента, який має межі чутливості 0х1и 0х2 и зону нечутливості Dх
Запитання для самоперевірки
1 Що уявляє собою елемент автоматики, телемеханіки й обчислювальної техніки?
2 Як класифікують елементи автоматики?
3 Надайте основні характеристики елементів автоматики
Зворотні зв'язки
|
|
|
Зворотний зв'язок утвориться в тому випадку, коли частина вихідного сигналу елемента подається на його вхід. На рис 1.3 показаний основний елемент, який охоплений зворотним зв'язком. Основний елемент має коефіцієнт перетворення К. Зворотний зв'язок у схемі здійснений за допомогою додаткового елемента зворотного зв'язку, що має коефіцієнт перетворення b.
На вхід елемента подається сигнал х, а на виході елемента утворюється сигнал у. Частина вихідного сигналу у1 подається на вхід елемента. Якщо сигнал у1 збігається по фазі з вхідним сигналом х, то утворюється позитивний зворотний зв'язок, при цьому на вхід основного елемента надходить сигнал х + у1. Якщо сигнал у1 не збігається по фазі з вхідним сигналом х, то утворюється негативний зворотний зв'язок і на вхід основного елемента надходить сигнал х - у1.
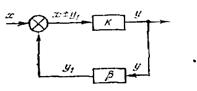
Рис 1.3 - Елемент, охоплений зворотним зв'язком
Зворотний зв'язок змінює коефіцієнт перетворення К. Визначимо коефіцієнт перетворення основного елемента, охопленого позитивним зворотним зв'язком.
Кп.з.з = у / х
Коефіцієнт перетворення основного елемента, не охопленого зворотним зв'язком, можна визначити за формулою:
Кп.з.з = у / (х + у1)
Коефіцієнт перетворення додаткового елемента, що створює зворотний зв'язок, можна визначити за формулою:
b = у1 / у
Формула коефіцієнта перетворення основного елемента, охопленого позитивним зворотним зв'язком, буде мати наступний вигляд:
Кп.н.з = К / (1 + b · К)
Формула коефіцієнта перетворення основного елемента, охопленого негативним зворотним зв'язком, буде мати наступний вигляд:
Кп.н.з = К / (1 - b · К)
Об'єднану формулу можна записати в такому вигляді:
Кп.н.з = К / (1 ± b · К) ,
де знак “+” відноситься до негативного зворотного зв'язку, а знак “-” - до позитивного.
Позитивний зворотний зв'язок збільшує коефіцієнт перетворення, але зменшує стабільність роботи елемента.
Негативний зворотний зв'язок зменшує коефіцієнт перетворення, але збільшує стабільність роботи елемента.
Запитання для самоперевірки
1. Коли і за допомогою чого буде утворюватися зворотний зв'язок?
2. Як зворотний зв'язок впливає на коефіцієнт перетворення і на стабільність роботи елемента?
1.1.3 Основні відомості про датчики і їх загальні характеристики
Датчик (первинний перетворювач інформації) - це пристрій, що перетворює контрольований або регульований розмір у такий вид сигналу, що більш зручний для впливу на наступні елементи автоматики, телемеханіки й обчислювальної техніки.
У загальному вигляді датчик Д (рис. 1.4) можна представити як чутливий елемент ЧЕ і перетворювач Пр. Чутливий елемент у системах автоматики і телемеханіки виконує функції “органів почуттів”. Він призначений для перетворення контрольованого розміру х у такий вид сигналу х1, що зручний для виміру.

Рис. 1.4 - Структура датчика
Вхідна величина - це найчастіше неелектрична контрольована величина (лінійне переміщення частини верстата, температура, сила, розмір деталі, швидкість і т.п.). Вихідний сигнал - перетворена вхідна величина, що передається на виконавчу чи проміжну ланку. Вихідні сигнали бувають електричні, гідравлічні, пневматичні, механічні, радіоактивні й ін. Наприклад, тиск х в електроконтактному манометрі спочатку перетвориться за допомогою чутливого елемента в механічне переміщення стрілки х1, а потім вже в перетворювачі—в зміну опору у.
Датчики, що випускаються промисловістю, мають малі габарити, масу, інерційність (тобто час на перетворення вхідної величини у вихідний сигнал), мають різні діапазони вимірювальних величин.
Загальними характеристиками датчиків є: статична характеристика; інерційність; динамічна (диференціальна) чутливість, межа чутливості; похибка; потужність; момент або зусилля, вимагаємі від джерела вхідного сигналу; вихідна потужність і вихідний опір датчика.
Розглянемо деякі з загальних характеристик датчиків.
Статична характеристика показує залежність вихідного розміру у від вхідного розміру х, де х - контрольований або регульований параметр, що діє на датчик, у - параметр, отриманий після перетворення.
Інерційність характеризується відставанням зміни вихідного розміру у від зміни вхідного розміру х. Вона приводить до похибок при вимірюванні вхідного розміру х і тому є небажаною.
Динамічна (диференціальна) чутливість датчика S або динамічний коефіцієнт перетворення датчика Кдин показує, у скільки разів збільшення вихідного розміру ( D у, dу) більше збільшення вхідного розміру ( D х, dх):
S = Dу / Dх = dу / dх
Бажано, щоб динамічна чутливість датчика S була як можна більш високою.
Характеристики датчиків можуть визначатися як розрахунковим, так і експериментальним шляхом.
Запитання для самоперевірки
1 Яку роль відіграє датчик у системах автоматики і телемеханіки?
2 З яких елементів складається датчик і їх функції?
3 Які характеристики є загальними для датчиків?
Класифікація електричних датчиків і вимоги до них
Найбільше поширення в автоматиці одержали електричні датчики, які можна розділити на дві великі групи: параметричні і генераторні (або датчики ЕРС).
Параметричні датчики призначені для перетворення неелектричного контрольованого або регульованого параметра в параметри електричного кола (R, L, C). Ці датчики отримують електричну енергію від допоміжного джерела енергії. Параметричні датчики поділяються на датчики активного опору (контактні, реостатні, потенціометричні, тензодатчики, терморезистори) і реактивного опору (індуктивні, ємнісні).
Генераторні датчики призначені для перетворення неелектричного контрольованого або регульованого параметра в ЕРС. Ці датчики не вимагають допоміжного джерела енергії, тому що самі є джерелами ЕРС. Генераторні датчики бувають термоелектричними, п'езоелектричними і тахометричними.
До параметричних і генераторних датчиків пред'являються наступні загальні вимоги:
1. безперервна і лінійна залежність вихідного розміру у від вхідного х;
2. висока динамічна (диференціальна) чутливість;
3. невелика інерційність;
4. найменший вплив датчика на вимірюємий або регулюємий параметр;
5. надійність у роботі;
6. придатність до використовуємої вимірювальної апаратури і джерел живлення;
7. найменша собівартість;
8. мінімальні маса і габарити.
При виборі датчика необхідно також враховувати особливості досліджуваного процесу: періодичність і максимальну частоту впливів, атмосферні умови (вологість і температуру повітря), наявність вібрацій в установці і ін.
Запитання для самоперевірки
1 Як класифікують датчики?
2 Для чого призначені параметричні датчики?
3 Для чого призначені генераторні датчики?
4 Які вимоги пред'являються до параметричних і генераторних датчиків?
Дата добавления: 2021-01-20; просмотров: 93; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!