Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов.
Пояснения к лекции «Двигатели переменного тока»
В лекции «Двигатели переменного тока» объединены две темы: «Принцип работы трёхфазного асинхронного двигателя» и «Однофазный асинхронный двигатель».
Если кто-то начал и успел законспектировать всю лекцию – это очень хорошо, поставлю дополнительно 5.
Третья лекция из цикла «Электрические машины переменного тока»
«Методы регулирования частоты вращения
асинхронного двигателя»
Как было выяснено в предыдущей лекции, скорость вращения ротора синхронного двигателя переменного тока равна n =60· f / p, а скорость вращения асинхронного двигателя отличается от скорости вращения синхронного двигателя только на величину скольжения ротора S =( n 1-n 2 ) n 1 , тогда скорость вращения асинхронного двигателя будет равна
n 2 =(1- S )·60· f / p
Проанализировав формулу, можно сделать вывод, что скорость асинхронного двигателя можно регулировать:
1. S - изменением величины скольжения, для этого в цепи обмоток статора включают реостат, но получаются большие тепловые потери. S можно менятьизменением питающего напряжения, например, поставив регулируемый автотрансформатор.
2. f - изменением частоты питающей сети, этот способ в настоящее время с развитием электроники получает всё большее распространение.
3. p - изменением числа пар полюсов, способ хорош, но скорость изменяет дискретно, например, в 2 раза.
|
|
|
Все варианты методов регулирования скорости электродвигателя представлены на рис. 77.

Рис. 77. Способы регулирования скорости асинхронных двигателей.
Регулировка скорости изменением частоты питающей сети.
В этом случае схема включения двигателя будет следующей:

Рис. 78
В цепи питания электродвигателя включены следующие элементы: сеть переменного тока 50Гц, преобразователь частоты, и фильтр.
Основной элемент преобразователь частоты включает в себя выпрямитель, трёхфазный генератор и выходные мощные ключи. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Так как трёхфазный генератор с регулируемой частотой выполняется, как правило, на цифровых микросхемах и на выходе получается импульсное напряжение, то на выходе генератора должен стоять фильтр. Этот фильтр должен пропускать напряжение только определённых частот, например, от 0 до 50Гц, а остальные частоты задерживать. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой. В качестве достоинства можно отметить плавную регулировку скорости вращения двигателя в широких пределах от 0 до максимума оборотов в минуту.
|
|
|
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
Два варианта данного метода приведены на рис. 79.
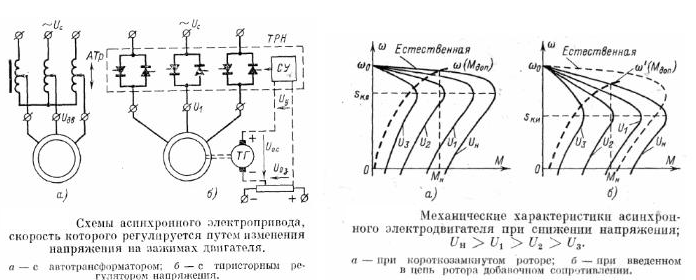
Рис. 79.
В первой схеме рис.79,а для регулирования напряжения используется трёхфазный автотрансформатор. Перемещая движки по обмоткам можно регулировать напряжение на двигателе. На правом рисунке рис.79.а показаны характеристики зависимости механического момента двигателя. При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рег (рис. 79), а скольжение от U рег не зависит.
|
|
|
Во второй схеме (см. рис.79.б) для регулировки используются тиристоры. Тиристор – это полупроводниковый прибор, который можно открыть внешним напряжением подаваемы на управляющий электрод, а закрывается он только при уменьшении падения напряжения на нём до нуля или уменьшением тока проходящего через него до нуля. То есть при включении тиристора в момент времени t 1 тиристор включается, а выключиться он только в момент времени t 3, когда напряжение в схеме упадёт до нуля. За время включённого состояния тиристора (его сопротивление близко к нулю) через него на двигатель будет подана часть напряжения полупериода, имеющая одинарную штриховку. Часть напряжения от момента времени t 0 до момента времени t 1 будет падать на закрытом тиристоре, так как его сопротивление будет близко к бесконечности.
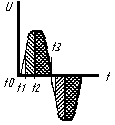
Рис.80 работа тиристоров
Если тиристор будет открыт в момент времени t 3, то тиристор будет открыт меньшее время, и на двигателе будет падать в этот период меньшее напряжение (двойная штриховка). На схеме (см. рис. 79.б) в каждой фазе включены по два тиристора встречно-параллельно. Один полупериод будет работать один тиристор, а во второй полупериод второй тиристор и на двигатель будет поступать симметричное напряжение.
|
|
|
Этот способ позволяет плавно регулировать скорость вращения двигателя, но потери мощности на регулирующем элементе большие.
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов.
Этот метод относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие двигатели называются многоскоростными. Схема приведена на рис.81.
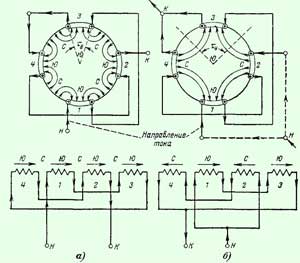
Рис.81 Схемы включения полюсов
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 82. Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную; б - с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Последний способ изменения скорости вращения ротора двигателя применим в двигателям с фазным ротором.
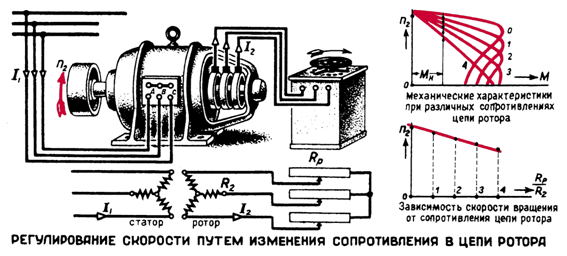
Рис. 83. Схема включения двигателя с фазным ротором.
В данном случае используются асинхронные трёхфазные двигатели имеющие ротор с тремя обмотками, намотанными аналогично статорным обмоткам. Концы роторных обмоток, включённых звездой, выводятся на кольца и с помощью щёток соединяются с группой реостатов также соединённых звездой. Если реостаты введены, то есть их сопротивление велико, то потери в обмотках ротора большие и взаимодействие магнитных полей статора и ротора резко снижается – скорость вращения мала. Когда реостаты выведены (их сопротивление близко к нулю), то магнитное поле ротора значительно увеличивается и скорость приближается к максимальной.
Дата добавления: 2021-01-20; просмотров: 53; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!