Кинематический и силовой расчет привода такой же, как и для мостового крана, смотри урок 3-4.
Урок 19-20, 21-22 (4 часа) 8.12.20
Здравствуйте уважаемые студенты!
Урок 19-20
Тема урока: «Подъемно - транспортное оборудование. Механизмы передвижения крана. Кинематический и силовой расчет привода.»
Цель урока – дать справочный материал для выполнения технологической части курсовых проектов. Это надо знать при защите дипломных проектов.
Ход урока
1. Начертить кинематические схемы механизма передвижения крана.
2. Описать назначение основных узлов
Учебники: Невзоров Л.А. «Устройство и эксплуатация грузоподъемных кранов»,
Гудков Ю.И. «Устройство и эксплуатация грузоподъемных кранов» или по кранам других авторов.
3. Переписать пример расчета, который привожу ниже, разобраться. Кому-то он понадобится.
Кинематическая схема механизма передвижения крана с промежуточным валом.
 |
1 – электродвигатель; 2 – муфта; 3 – редуктор РМ 400; 4 – колесо.
I – вал электродвигателя; II – ведущий вал редуктора; III – ведомый вал редуктора; IV – промежуточный трансмиссионный вал; V- приводной (трансмиссионный) вал колеса.
Рисунок 1.
2.2 Кинематический и силовой расчёт привода
Определяем вращательный момент на валу электродвигателя из формулы:
 , (1)
, (1)
где Рэл.дв.=7,5 – мощность электродвигателя, кВт;
Мвр.эл.дв. – вращательный момент на валу электродвигателя, Н∙м;
wэл.дв. – угловая скорость электродвигателя, с-1.
 , (2)
, (2)
где nэл.дв = 695 – число оборотов на валу электродвигателя, об/мин.
 .
.
Тогда из формулы (1) находим вращательный момент на валу электродвигателя:
 .
.
Этот момент передаётся на ведущий вал редуктора через муфту. Пренебрегая потерями в муфте, можно записать:
Мэл.дв.=МII=103,11 (Н∙м).
Определяем вращательный момент на выходном валу редуктора (МIII):
 , (3)
, (3)
где МII – вращательный момент на ведущем валу, Н∙м;
iр общ = 15,75 – передаточное число редуктора РМ-400;
ηред=0,93 – КПД редуктора.
 .
.
Определяем вращательный момент на валу приводного колеса (МV):
МV=MIV=Mвр.III=1559 (Н∙м), так как потерями в муфтах пренебрегаем.
Получили максимальное значение вращательного момента, которое может передать данный электродвигатель через редуктор РМ-400 на вал приводного колеса при данном передаточном числе.
Урок 21-22
Тема урока: Козловые краны. Принципиальная схема крана. Механизм подъема груза. Кинематический и силовой расчет привода.
Ход урока
1. Начертить принципиальную схему козлового крана.
- Назначение основных узлов крана
- Назначение крана.
Принципиальная схема козлового крана представлена на рисунке 1.
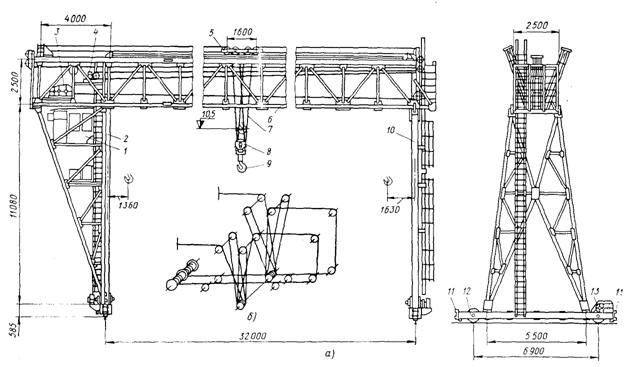
1–кабина крановщика; 2–левая опора; 3–привод грузовой лебёдки; 4–привод передвижения телеги; 5–грузовая тележка; 6-ферма; 7-трос; 8-траверса; 9-гак; 10- правая опора; 11-захваты; 12-кoлёса; 13-привод передвижения крана; 14- колодочный тормоз.
Рисунок 1
Назначение основных узлов, их конструктивные особенности, краткая
техническая характеристика козлового крана
Металлоконструкция крана
Металлоконструкция крана состоит из мостовой фермы и четырех опор, которые опираются на ходовые тележки. Ферма представляет собой геометрически неизменяемую конструкцию, состоящую из двух поясов (верхнего и нижнего), раскосов и стоек. Такая конструкция обеспечивает достаточную жесткость моста при подъеме и опускании грузов. При больших пролетах одна опора имеет жесткую конструкцию, выполненную в виде мостовой фермы, вторая — гибкую, что предотвращает возможность заклинивания ходовых колес крана и значительных перекосов опор при температурных изменениях длины моста или случайных нарушениях ширины колеи. По ригелю крана на специально предусмотренном рельсовом пути перемещается грузовая тележка.
Механизмы передвижения кранов выполняются в форме одноколесных или балансирных тележек, которые соединяются с основанием стоек опор или ходовых балок. Узлы установки ходовых колес от козловых кранов могут быть цилиндрическими или сварными, закрепляемыми внутри опоры.
Кран козловой общего пользования, как правило, оснащен специальными грузозахватными устройствами.
Грузовые тележки выполняются большей частью двух рельсовые и могут перемещаться как по верхнему, так и нижнему поясам ригеля.
Грузовые тележки конструктивно выполняются двух типов. На первых размещены механизмы подъема груза и передвижения тележки, на вторых они отсутствуют, вместо них установлены отклоняющие блоки троса грузовой лебедки и неподвижно закреплены концы троса тяговой лебедки, расположенных на ригеле или на опорах крана.
В нашем случае грузовая тележка крана первого типа и движется по рельсам нижнего пояса фермы. На тележке расположен механизм подъема груза и механизм передвижения тележки.
Механизм передвижения крана состоит из электродвигателя (МТГ-111-6; 220/380 В, 4,1 кВт, 880 об/мин); редуктора (ЦЗВК-125-16-26); цепной муфты; тормоза (ТКТ-100); зубчатой муфты; ходовых колёс.
Для облегчения работы съёмного оборудования (магнитного подъёмника, моторного грейфера, моторного захвата лесоматериалов) установлен кабельный барабан, который вращает паразитная шестерня редуктора. Линейная скорость наматывания кабеля на барабан равна скорости подъёма груза.
Резиновые буфера ограничивают передвижение грузовой тележки по мосту крана, под каждым колесом для очистки рельсов, установлен метельщик.
Кожух тележки защищает все механизмы от механических повреждений и попадания осадков.
Управление всеми тележками осуществляется контролером из кабины. Род тока переменный, трехфазный напряжение 220/
При крюковой работе крана, работе с полуавтоматической траверсой, рельсовой траверсой, со стропами приводная шестерня кабельного барабана грузовой тележки должна быть выведена из зацепления с паразитной шестернёй редуктора и зафиксирована стопорным винтом.
Торможение груза осуществляется тормозом.
Механизм подъема груза
Состоит из крюковой подвески, неподвижных блоков, электродвигатля, компенсирующей (втулочно-пальцевой) муфты, муфты-тормоза, двухступенчатого редуктора, зубчатой муфты и грузового барабана, концевого выключателя КУ-703, который ограничивает высоту подъема груза.
В качестве грузового каната применяются стальные проволочные канаты по ГОСТ 26880-80 типа ЛК-Р.
Кабина управления краном может быть неподвижной, закрепленной в районе одной из ног крана, или подвижной, перемещаемой вместе с тележкой по тем же рельсовым путям. Для удобства транспортирования крана с одного объекта на другой и монтажа его на различную длину пролета ригель выполняют по длине, составляемый с соединениями на болтах или пальцах.
В данном проекте кабина крановщика состоит из металлического каркаса с наружной металлической обшивкой. Для улучшения обзорности и естественной вентиляции кабина имеет три открывающихся окна: одно переднее и два боковых. Задние окна не открываются. Для выхода на обходные площадки моста крана в крыше кабины имеется люк. Для создания нормального температурного режима в холодное время года в кабине установлены электронагревательные устройства, которые также защищают стёкла от обледенения.
Кабина оборудована сидением крановщика поворотного типа и устройством, защищающим крановщика от прямых солнечных лучей.
Для управления кранов в кабине установлены командо - контроллеры. Для освещения кабины под потолком установлена лампочка, закрытая плафоном.
Энергоснабжение данного козлового крана осуществляется от внешней сети переменного трехфазного тока напряжением 380 В и частотой 50 Гц. Напряжение на кран подается через троллейные токосъемники.
Электрооборудование крана включает в себя:
- четыре электродвигателя передвижения типа 4МТГ 132 LВ6;
-четыре электродвигателя гидравлических толкателей тормозов передвижения крана;
- электродвигатель подъёма и опускания груза типа МТГ-412-8;
- электродвигатель гидравлического толкателя тормоза грузового крана;
- электродвигатель передвижной системы грузовой тележки крана типа МТГ-111-6;
- электромагнит МО-100Б тормоза грузовой тележки;
- распределительный шкаф с коммутационной аппаратурой;
- ящики пусковых сопротивлений электродвигателей крана;
- контроллер ПМС-160;
- контроллеры ККТ-61А;
- щит управления;
- аппаратура звуковой и световой сигнализации, освещения, отопления и вентиляции;
- грузоподъёмный электромагнит ГЭМ-117 ЛК-1.
В режиме спаренной работы электрической схемой крана предусмотрена возможность управления электропроводами грузовой и ходовой тележек обоих кранов дистанционно из одной кабины.
Противоугонный захват
Противоугонный захват устанавливается на балках ходовых тележек, по два на каждой балке. Они служат для удержания крана от самопроизвольного перемещения в нерабочем состоянии.
Захват рельса происходит челюстями с помощью винта с рукояткой.
Балка с талью
Балка с талью – для ремонта грузовой тележки служит для подъёма и опускания тяжёлых узлов и деталей во время ремонта.
На данном кране балка крепится к верхней части фермы на консоли со стороны кабины. На консольную часть балки навешивается таль грузоподъёмностью 0,5 т.
Навесное оборудование
Навесная траверса – предназначена для захвата рельсового звена и для погрузки и выгрузки рельсов. Универсальная траверса представляет собой балку коробчатого сечения, внутри которого закреплён рычаг. Верхний сектор рычага через тягу связан с рукояткой. При втягивании или выдвижении рукоятки рычаг поворачивается вокруг своей оси и через тяги, которые закреплены на нижнем диске рычага, приводит в движение стопоры, которые перемещаются в направляющих. Для удержания стопоров во включённом положении служит пружина. Челюсти соединены между собой осью шарнирно и шарнирно с серьгами. Серьги крепятся к балке при помощи неподвижных осей.
Работа траверсы обеспечивает автоматический захват звена или автоматическое его отцепление после укладки.
Стропы
К крану крепятся специальные стропы, схема применения которых делятся на несколько частей, два пакетных стропа, грузоподъёмностью по 5 т каждый.
Концы каната распускаются на длине 450 мм и вплетаются в тело несущей ветви. Заплетённые части каната в 3-х местах обвивают стальной лентой или способом опрессовки алюминиевой втулки.
При выгрузке шпал из полувагонов данным краном рекомендуется придерживаться следующей последовательности:
- две стропы с навесными кольцами надеть на крюк подвески крана;
- крюк с надетыми стропами поднять и свободные концы строп подвести к зазору между стенкой полувагона и опустить стропы до пола;
- через люки полувагонов протащить концы стропов к противоположной стенке полувагона;
- крюком из прутка или проволоки поднять концы строп и надеть на крюк крана.
При наличии зазоров между торцами нагруженных в полувагоне деревянных шпал, под шпалы можно завести стропы, оба конца которых навешены на крюк крана с последующей сдвижкой их на расстояние 500 мм от края шпал.
Кроме того, на каждом кране имеются приборы, обеспечивающие безопасность работы механизмов, и вспомогательное оборудование, включающее отопительное, осветительное и монтажную оснастку.
Кинематический и силовой расчет привода такой же, как и для мостового крана, смотри урок 3-4.
Не забываем про курсовик!
Дата добавления: 2021-01-20; просмотров: 120; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!